- 1. 训练框架概述
- 2. 重点 Deepspeed框架介绍
- 3. DeepSpeed框架实践
- 4. debug
- 5. 扩展
1. 训练框架概述
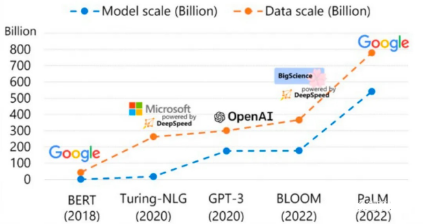
100亿 10^10 10B 参数量 是模型具备涌现能力的基本门槛
如何充分的利用显卡的能力 充分的使用显存
分布式训练框架对比
Megatron and DeepSpeed是目前主流的训练加速框架
训练框架地址:
Megatron-LM: https://github.com/NVIDIA/Megatron-LM
DeepSpeed: https://github.com/microsoft/DeepSpeed
mesh-tensorflow: https://github.com/tensorflow/mesh
fairscale: https://github.com/facebookresearch/fairscale
megatron - 英伟达
DeepSpeed - 微软
2. 重点 Deepspeed框架介绍
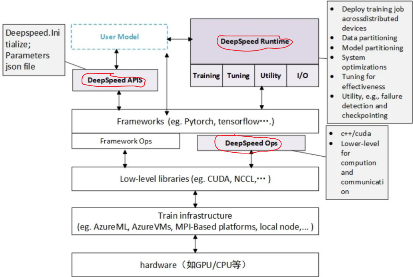
Deepspeed是由微软开发的一款开源深度学习优化库,旨在提高大规模模型训练的效率和可扩展性。该框架采用多种技术手段来加速训练,其中包括模型并行化、梯度累积、动态精度缩放、本地模式混合精度等。
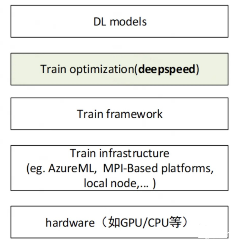
Deepspeed还提供了一些辅助工具,如分布式训练管理、内存优化和模型压缩等,以帮助开发者更好地管理和优化大规模深度学习训练任务。该框架是基于PyTorch构建的,因此可以简单修改以便进行迁移使用。Deepspeed已经在许多大规模深度学习项目中得到了应用,包括语言模型、图像分类、目标检测等领域。在深度学习模型软件体系架构中,Deepspeed扮演着重要的角色。
Deepspeed软件架构主要分为三个部分:
-
APIs:提供简单易用的api接口,使用者只需要调用几个接口就能够完成模型训练和推理任务。
其中最重要的接口是initialize,用于初始化引擎并配置训练参数和优化技术。配置参数通常保存在config.json文件中。 -
Runtime:运行时组件,是Deepspeed的核心组件,主要用于管理、执行和性能优化。该组件包括将训练任务部署到分布式设备、数据分区和模型分区、系统优化、微调、故障检测、checkpoints保存和加载等功能,并使用Python语言实现。
-
Ops 算子
使用C++和CUDA优化计算和通信。此组件涵盖了许多关键技术。
Deepspeed是一款高效、可扩展的深度学习优化库,其中一些核心技术如下:
-
ZeRO(Zero Redundancy Optimizer)
ZeRO是一种内存优化技术,用于大规模分布式深度学习。该技术可以消除数据并行进程中的内存冗余,通过在数据并行进程之间划分模型状态参数、梯度和优化器状态,而不是复制它们。此外,ZeRO还使用动态通信调度在分布式设备之间共享必要的状态,以保持数据并行的计算粒度和通信量。基于ZeRO,DeepSpeed实现了数据并行、流水线并行和张量切片模型并行等方式的训练,以提高显存和计算效率,并能够训练具有万亿个参数的模型。 -
3D并行
数据并行和模型并行可能会导致内存冗余,因此DeepSpeed采用基于ZeRO的3D并行来优化显存利用和计算效率。该技术将模型状态参数、梯度和优化器状态按照3D方式划分,并使用动态物理内存分配来减少内存占用。 -
梯度累积
DeepSpeed还使用梯度累积来提高批量大小,从而提高训练效率。梯度累积可以通过多次前向传递和反向传递来累积梯度,从而实现较大的批量大小。
3. DeepSpeed框架实践
DeepSpeed框架与ChatGLM微调模型相结合的实践案例
- 环境
conda install pytorch==1.12.0 \
torchvision==0.13.0 \
torchaudio==0.12.0 \
cudatoolkit=11.3 -c pytorchpip install deepspeed==0.8.1
sudo yum install openmpi-bin libopenmpi-dev
pip install mpi4py
- 下载模型
https://huggingface.co/THUDM/chatglm-6b/tree/main
- 准备训练样本
训练数据通常由三个部分组成:prompt、response和history。
{"prompt": "什么事。\n[姓名]:张三\n[年龄]:45.0\n[性别]:男士\n[省份]:湖北","response": "打扰您了,给您介绍下近期的优惠活动?","history": [["","您好,请问是张先生吗?"],["是。","喂,您好,我这是您专属客服顾问。"]]
} - 代码准备
git clone https://github.com/THUDM/ChatGLM-6B.git
- 核心代码
import torch
import deepspeed
from torch.utils.data import RandomSampler, DataLoader
from torch.utils.data.distributed import DistributedSampler...# 一、初始化DeepSpeed引擎
model_engine, optimizer, _, _ = deepspeed.initialize(args=cmd_args,model=model,model_parameters=params)
# 二、分布式环境设置
deepspeed.init_distributed()....# 三、预加载模型和训练数据
model = ChatGLMForConditionalGeneration.from_pretrained(args.model_dir)
tokenizer = ChatGLMTokenizer.from_pretrained(args.model_dir)
# DataLoaders creation:
train_dataloader = DataLoader(train_dataset,batch_size=conf["train_micro_batch_size_per_gpu"],sampler=RandomSampler(train_dataset),collate_fn=coll_fn,drop_last=True,num_workers=0)....# 四、训练循环
for step, batch in enumerate(train_dataloader):#用于向前传播和损失计算loss = model_engine(batch)#向后传播model_engine.backward(loss)#优化器更新model_engine.step()-
注意
启动训练前需要配置机器之间免登、.deepspeed_env环境变量、调整训练参数 -
启动
cd ./ChatGLM-6B/ptuning/nohup deepspeed --hostfile=myhostfile --master_port 9000 main.py \--deepspeed deepspeed.json \--do_train \--train_file /data/train.json \--test_file /data/dev.json \--prompt_column prompt \--response_column response \--history_column history \--overwrite_cache \--model_name_or_path /data/pre_model/chatglm/chatglm-6b \--output_dir ./output/out-chatglm-6b-ft-le-4 \--overwrite_output_dir \--max_source_length 64 \--max_target_length 64 \--per_device_train_batch_size 4 \--per_device_eval_batch_size 1 \--gradient_accumulation_steps 1 \--predict_with_generate \--max_steps 50000 \--logging_steps 10 \--save_steps 10000 \--learning_rate $LR \--fp16 &- 推理演示
pip install fastapi uvicorn
python api.py
调用
curl -X POST "http://127.0.0.1:8000" \-H 'Content-Type: application/json' \-d '{"prompt": "你好", "history": []}'相应:
{"response":"你好👋!我是人工智能助手 ChatGLM-6B,很高兴见到你,欢迎问我任何问题。","history":[["你好","你好👋!我是人工智能助手 ChatGLM-6B,很高兴见到你,欢迎问我任何问题。"]],"status":200,"time":"2023-06-03 21:38:40"
}4. debug
- 多机多卡跑不起来,多机间不能通信
Call to connect returned Connection refused, retrying解决办法:deepspeed环境依赖问题,重新装pytorch依赖
conda install pytorch==1.12.0 \
torchvision==0.13.0 \
torchaudio==0.12.0 \
cudatoolkit=11.3 -c pytorch-
使用官方ChatGLM-6B 代码训练的时候 loss不降不明显
通过换为ChatGLM-Finetuning的训练框架,loss下降平稳
git clone https://github.com/liucongg/ChatGLM-Finetuning.git -
ChatGLM-Finetuning官方代码采样器的时候用的是随机采样,导致8卡单机只能跑6卡;
改源码,调整成支持对训练数据分布式采样
# 改成分布式采样
# DataLoaders creation:
if args.local_rank == -1:train_sampler = RandomSampler(train_dataset)
else:train_sampler = DistributedSampler(train_dataset)train_dataloader = DataLoader(train_dataset,batch_size=conf["train_micro_batch_size_per_gpu"],sampler=train_sampler,collate_fn=coll_fn,drop_last=True,num_workers=0) - 将代码改成支持分布式采样之后,分布式跑10万级训练数据没问题,扩大到100万级训练数据之后依旧只能跑6卡的问题
训练100万级训练数据时,向量化数据需要4个小时左右,向量化后的数据占用内存在140G左右,默认情况下分布式训练每个进程都需要加载完整数据集,在当前单机8卡机器内存总共只有1T的情况下,最多只能使用6卡,有1/4的资源空闲。
解决方案:
改源码,重写dataset逻辑为:
1.均分完整数据集到所有进程;
2.训练时每个进程同一时间只加载单个分段大小(batch_size)数据集;
3.token转向量后的内存数据dump到文件,重新训练的时候加载向量化后的数据。
4.模型训练过程中,训练数据质量比较关键,扩充训练样本的特征提示,可以提升模型训练效果。
5.多机训练时,每台机器的训练代码和环境务必一致。
5. 扩展
ZeRO链接: https://zhuanlan.zhihu.com/p/618865052?utm_id=0
- Data Parallelism (DP)数据并行
将模型复制到多个GPU设备,每张GPU当中都存放了一个复制的GPU版本。每个设备都可以并行接受输入的 data batches 。
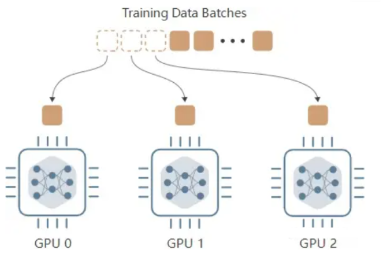
特点:数据并行策略并不能节省总的训练内存,这是好理解的,因为在训练过程中,模型被分配到了每个 GPU 一份,这就意味着产生了很多额外的内存消耗。另外,如果模型本身的权重大小难以保存在一张 GPU 时。数据并行的算法将不能使用,无论你扩大自己的计算资源到 8张 还是 100张,都无法展开训练。
使用数据并行带来的好处在于,数据并行将极大提高训练速度,因为每个设备只需在总训练数据的一小部分上进行训练。不过,由于设备间梯度交换会带来通信开销,速度提升并不与设备数量成线性关系。
-
Model Parallelism (MP)模型并行
当模型自身参数量很大时,数据并行过程将无法使用,因此, Model Parallel (MP) 模型并行在这样的背景下应运而生,MP 算法不同于 DP 将模型复制到每个设备上,MP 选择将模型拆开,每个 GPU 设备只保存模型权重的一部分,在 forward 前向传递过程中,数据将依次通过各个设备,一个设备的输出作为另外一个设备的输入。
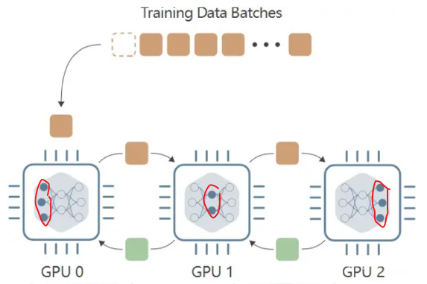
特点:模型并行的优势在于面对参数量很大的模型,能够有效减少模型对显存的占用。
缺点很明显,假设我们有三个 GPU 设备,数据并行会同时使用这三个 GPU 进行训练,而模型并行用这三个设备执行一次训练,带来的时间损耗很大。 -
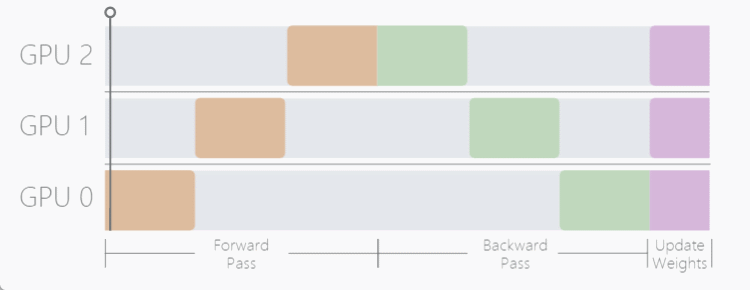
Pipeline Parallelism (PP)流水线并行
将batch拆分micro-batches
通过将每批输入数据拆分成若干较小的 "micro-batches",来减少设备的空闲时间。只有在整个模型处理完每个micro-batches后,才会更新模型参数,这意味着当其他设备仍在处理上一个 micro-batches 时,每个设备就可以开始处理下一个 micro-batches 。
PyTorch 通过 torch.distributed.pipeline.sync.Pipe 类内置了对流水线并行性的支持。不过,该类的两个主要限制是:
(1) 它只在模型作为 torch.nn.Sequential 模块实现时起作用;
(2) 它要求每个模块的输入和输出要么是单个张量,要么是张量的元组