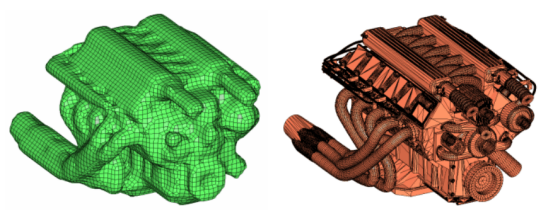
在HyperWorks中,针对某些具有复杂几何特征的零部件的网格剖分,Altair HyperMesh 向用户提供了一种名为 Shrink Warp Meshing 的技术,快捷高效地完成有限元模型前处理工作。例如在车辆碰撞分析研究中,用户可以使用 Shrink Warp Meshing 技术快速构建诸如传动系统等(具有复杂几何特征且非重点分析对象)零部件的有限元模型,从而缩短建模周期,提高工作效率。
通过 Shrink Warp Meshing 技术建立的有限元模型与其原始几何相比,在尺寸,质量及几何形态上基本保持了一致,而在细节特征上则进行了一定程度的简化。Altair HyperMesh 向用户开放了一系列参数,用以控制 Shrink Warp Meshing 有限元模型与原有几何的逼近程度。
Shrink Warp Meshing 的对象可以是单元(element)、部件(component)、曲面(surface)和实体(solid)。Shrink Warp Meshing 允许用户一次对多个部件进行网格剖分。在进行网格剖分的过程中,用户可以控制只对模型中的部分单元、曲面及实体进行网格剖分,并可自主选择是否在表面二维网格的基础上生成三维实体网格。Shrink Warp Meshing 生成的三维实体网格为全六面体结构。
相当多的零部件模型是以名为.stl 的数据格式进行保存和传输的.stl 格式的一个显著特点是模型全部由二维刻面结构包络而成。Shrink Warp Meshing提供了在.stl格式的基础上直接对其进行实体网格剖分的能力。此外,在汽车碰撞分析中,汽车模型的某些部件(如传动系统),由于并不是分析人员关心的主要位置,所以并不需要构建高度精确的此类零部件的有限元模型。此时,用户就可以通过 Shrink Warp Meshing 技术,快速获得一个简化但仍具有一定几何保真度的零部件有限元模型,并将其应用于待分析的车辆模型中。
Shrink Warp Meshing 模型并不会影响分析人员所关心的的关键位置求解精度,而通过引入该技术,用户的工作效率将得到相当程度的提升。
Shrink Warp Meshing 的另外一个重要用途在于,它可以帮助用户处理某些异常棘手的几何清理问题。Altair HyperMesh 中的四面体网格剖分功能 TetraMesh,要求用户首先对待剖分的几何体表面进行几何清理,然后以生成表面二维网格为基础生成实体网格。由于种种原因,某些情况下零部件的表面会存在各种各样的几何缺陷,使用传统的手工几何清理及剖分二维网格会耗费大量的工时,而 Shrink Warp Meshing 技术可以在几何体表面快速的构建封闭二维网格,以满足用户的需求。在技术细节层面上,为了实现这一目的,要求用户在进行 Shrink Warp Meshing 时,选取的单元边长应大于模型中那些细小的几何特征的尺度,这可以控制 HyperMesh 顺利缝合几何体表面的二维网格。
Shrink Warp Meshing 向用户提供了两种类型的网格剖分方式:loose mesh 和 tight mesh。另外,如果用户有需求,还可以在 loose mesh 和 tight mesh 的基础上,通过 generate solid mesh 功能直接生成全六面体网格。
在本教程的以下章节中,我们将就 Loose Shrink Warp Mesh,Tight Shrink Warp Mesh 以及 Volume Shrink Warp 这三项功能作具体讨论。