- 设置扬声器阵列,预先设置扬声器阵列的覆盖角
- 根据扬声器阵列的覆盖角得到截止频率F
- 将音频信号小于截止频率F的频段采用空间重采样法进行恒定束宽控制;将音频信号大于或等于截止频率F的频段采用CBT阵列理论进行恒定束宽控制;
基本流程图如下:

step1: 首先,确定系统参数. 根据期望的\(\theta\),结合实际的手中已有的条件、资源等(如考虑到阵元的size以及Number涉及到钱的问题),折中确定好阵列的间距,也就确定了阵列的长度
如阵列间距为17mm, 50个阵元, 则具体计算公式为:
\(f_{下限} = \frac{声速}{阵列长度} = \frac{343}{(50-1)17*10^{-3}} = 417\)Hz
\(f_{上限} = \frac{声速}{阵元间距} = \frac{343}{17*10^{-3}} = 20200\)Hz
当驱动器间距等于一个波长时,出现波束宽度控制的频率上限,而当驱动器间距大于半个波长时,可能开始形成旁瓣。因此,即使具有换能器102(或驱动器)的阵列150可间隔开17mm,阵列150也可提供高达20200Hz下的恒定波束宽度,在10 ,100Hz处开始形成旁瓣。
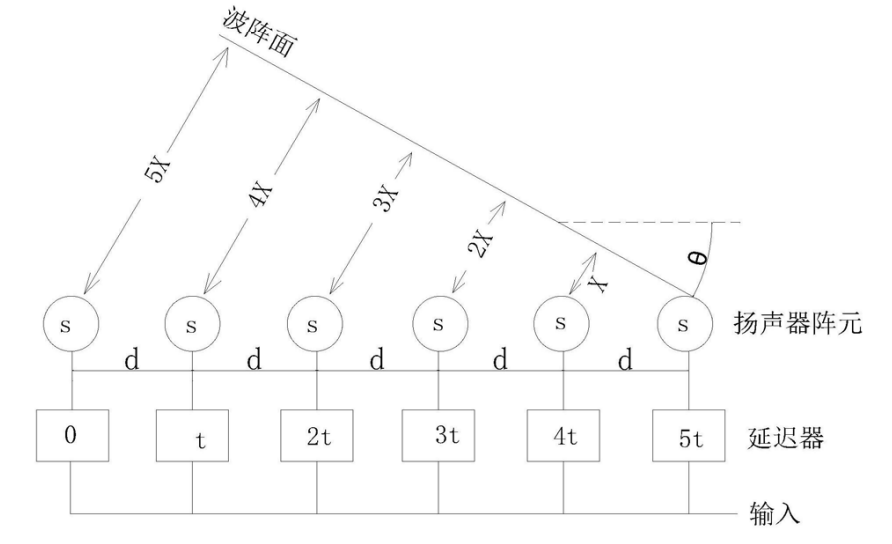
step2: 然后, 衍生虚拟圆弧. 通过延时来虚拟地“弯曲”这个线性的阵列,以实现beamwidth.
具体做法如下:
step1:对各阵列进行不同程度的时间延迟,进而产生虚拟圆弧
进一步做法如下:
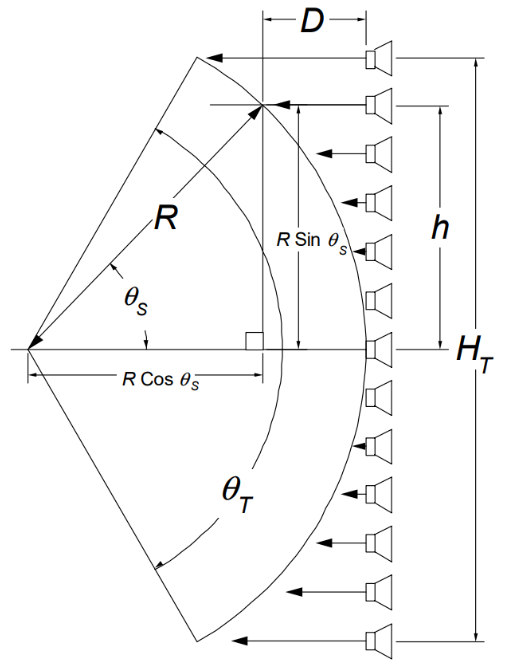
确定好的beamwidth是整个圆弧角对应的范围,即图中的\(\theta_T\), 弧角的一半即半角为\(\theta_0\)
将每个阵元向后移动到弧上,水平移动,注意这里移动到弧上之后的阵元间距即每段弧长是不等的。
然后根据图中的几何关系,确定好每个阵元具体相对于圆弧中心的角度\(\theta_S\)
具体公式为
其中,这里的\(x = \frac{\theta}{\theta_0}\)
CBT圆弧的半径计算方式为:
从直线阵向后移动到弧上的各阵元的角定位的计算方式为:
其中, \(h\)是各阵元的高度.
进一步, 从直线阵水平后移到圆弧阵所需的偏移量的计算方式为:
知道了各个阵元的偏移量, 也就确定了各阵元具体所需的延时\(\tau\)
至此, 完成了从直线阵到虚拟圆弧阵的转换, 但此时还是单一方向的, 暂无偏转.
step3: 波束指向中心进行偏转
二维旋转矩阵逆时针:
二维旋转矩阵顺时针:
可能有所疑问, 为何这就是旋转了? 具体可以这么看:
而
所以
所以, \(V\)是一个旋转矩阵.
step4:
相乘完成线阵的偏转, 然后归一, 因为可能会涉及到延迟 和 提前. 没办法提前, 所以, 进行一个类似归一化的操作, 令提前的为0, 然后延迟的再延迟即可.
最后就是 $ \omega e^{-j2\pi f\tau} $