20221320冯泰瑞《密码系统设计》第十二周
学习内容
- Head First C 嗨翻C语言第12章
- 课程 mindmap
AI 对学习内容的总结
要求
- 让AI(kimi,元宝等)阅读学习内容并进行总结,教材内容可以使用微信读书或者云班课电子教材
总结
《Head First C》第十二章的内容主要介绍了如何在C语言中使用POSIX线程(pthread)来编写并发程序。以下是对这一章节内容的总结:
-
并发编程的必要性:
- 程序常常需要同时执行多个任务,如游戏需要同时更新图形、计算物体位置、读取控制信息等。
- POSIX线程可以帮助代码并行执行,提高响应性,但需要小心避免线程间的冲突。
-
线程与进程:
- 进程可以同时执行多个任务,但创建进程耗时且难以共享数据。
- 线程是轻量级进程,可以快速启动,共享数据,并减少代码复杂性。
-
线程的基本概念:
- 单线程程序一次只能执行一个任务,而多线程程序可以同时执行多个任务。
- 线程共享相同的堆内存、文件和网络套接字。
-
创建线程:
- 使用POSIX线程库(pthread)来创建和管理线程。
- 线程函数需要有
void*返回类型,即使没有实际的返回值,也返回NULL。
-
线程同步:
- 线程同步是确保线程安全访问共享数据的关键。
- 互斥锁(mutex)是一种基本的同步机制,用于保护共享数据不被多个线程同时访问。
-
线程函数参数和返回值:
- 线程函数只能接受一个
void*参数并返回一个void*值。 - 可以通过将整数类型转换为
void*来传递和返回整数值。
- 线程函数只能接受一个
-
线程安全问题:
- 如果多个线程同时读写同一个变量,程序的行为将变得不可预测。
- 通过使用互斥锁可以避免这种情况,确保一次只有一个线程可以访问临界区代码。
-
死锁:
- 当两个线程各自持有一个互斥锁并等待对方持有的锁时,就会发生死锁,导致程序停滞。
-
线程的性能:
- 线程可以提高程序的并行度,但过多的锁定可能导致性能下降。
- 减少线程间共享数据的访问可以提高效率。
-
线程与进程的比较:
- 线程通常比进程更快,因为创建线程比创建进程需要的时间更少。
对 AI 总结的反思与补充
要求
- AI总结的问题
- 自己的补充
反思与补充
AI总结的问题
上述总结内容已经相当全面地覆盖了《Head First C》第十二章的主要内容。然而,其仍然存在的一些问题点:
- 示例代码的解释:
- 总结中没有提及具体的示例代码,例如如何使用
pthread_create和pthread_join来创建和管理线程。添加一些关键代码片段的解释可能会帮助读者更好地理解线程的创建和同步。
- 总结中没有提及具体的示例代码,例如如何使用
- 线程同步的详细说明:
- 虽然提到了互斥锁(mutex)的概念,但没有详细说明如何正确地使用它们来保护共享数据。可以进一步解释
pthread_mutex_lock和pthread_mutex_unlock的使用,以及如何避免死锁。
- 虽然提到了互斥锁(mutex)的概念,但没有详细说明如何正确地使用它们来保护共享数据。可以进一步解释
- 线程的生命周期和管理:
- 总结中没有提到线程的生命周期,包括线程的创建、执行和结束。可以添加一些关于如何管理线程生命周期的信息。
- 线程的上下文切换:
- 可以简要解释线程的上下文切换,以及它如何影响程序的性能。
- 线程的优先级和调度:
- 虽然这一章可能没有涉及,但可以简要提及线程的优先级和调度策略,这些是并发编程中的重要概念。
- 实际应用场景:
- 可以提供一些实际的应用场景,说明为什么和何时使用多线程,以及它们如何解决特定问题。
- 错误处理:
- 在多线程编程中,错误处理尤为重要。可以强调在创建线程和处理线程同步时如何进行错误检查和处理。
- 线程与现代硬件的交互:
- 可以简要讨论现代多核处理器如何与线程交互,以及这如何影响程序设计。
- 安全性和最佳实践:
- 可以强调线程编程中的安全性问题和最佳实践,比如避免共享资源的竞态条件。
我的补充
- 示例代码的解释:
- 在创建线程时,可以使用
pthread_create函数,例如:pthread_create(&t0, NULL, does_not, NULL);这里&t0是线程标识符,NULL表示默认属性,does_not是线程函数,NULL是传递给线程函数的参数。pthread_join函数用于等待线程结束:pthread_join(t0, &result);。
- 在创建线程时,可以使用
- 线程同步的详细说明:
- 使用互斥锁时,首先需要初始化一个互斥锁变量,如
pthread_mutex_t a_lock = PTHREAD_MUTEX_INITIALIZER;。在访问共享数据前使用pthread_mutex_lock(&a_lock);锁定代码段,访问完成后使用pthread_mutex_unlock(&a_lock);解锁。
- 使用互斥锁时,首先需要初始化一个互斥锁变量,如
- 线程的生命周期和管理:
- 线程的生命周期包括创建、就绪、运行、阻塞和结束状态。线程管理涉及到创建线程、同步线程、取消线程以及等待线程结束等操作。
- 线程的上下文切换:
- 上下文切换是指操作系统保存当前线程的状态并恢复另一个线程的状态,以便后者可以执行。频繁的上下文切换可能会降低程序性能。
- 线程的优先级和调度:
- 线程优先级决定了线程被调度执行的顺序。高优先级的线程更可能被首先执行。调度策略可以是轮询、优先级调度或混合调度。
- 实际应用场景:
- 例如,在Web服务器中,可以为每个客户端请求创建一个线程,以并行处理多个请求,提高服务器的响应速度和吞吐量。
- 错误处理:
- 在多线程编程中,任何线程创建或同步操作都应该检查返回值以确认是否成功。例如,
if (pthread_create(&t0, NULL, does_not, NULL) == -1) error("Can't create thread t0");。
- 在多线程编程中,任何线程创建或同步操作都应该检查返回值以确认是否成功。例如,
- 线程与现代硬件的交互:
- 现代多核处理器可以同时执行多个线程,每个核心可以独立调度线程。这允许程序充分利用硬件资源,提高并行度。
- 安全性和最佳实践:
- 避免共享资源的竞态条件,确保每次只有一个线程可以访问共享资源。使用互斥锁保护共享数据,并确保在任何代码路径上都能正确释放锁,避免死锁。
学习思维导图
要求
- Mermaid 代码与截图(参考Mermaid MindMap语法)或者提交思维导图链接(如果使用线上编辑器,推荐processon,xmind,...)
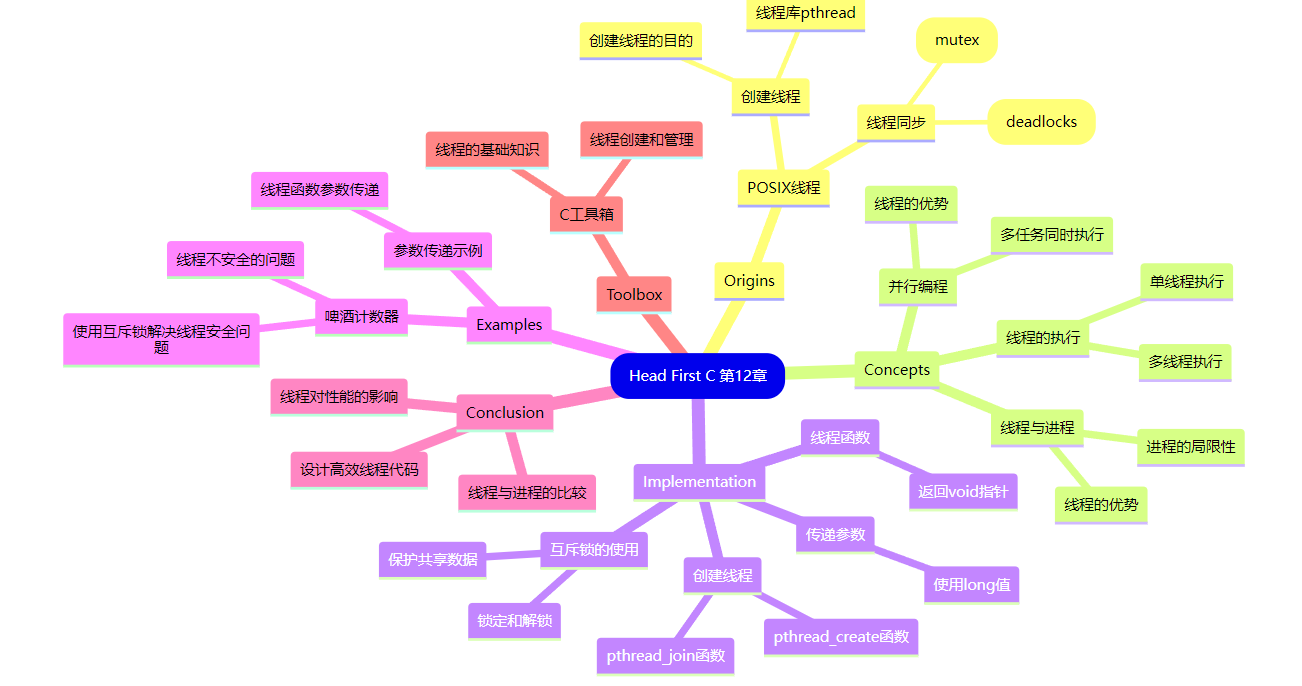
思维导图
代码:
截图:
基于 AI 的学习
要求
- 至少找到自己理解不是太好 2 个概念,让 AI 对自己进行苏格拉底提问
- 参考下面提示语或者使用 AI Agent
提示词:“我在学***X知识点,请你以苏格拉底的方式对我进行提问,一次一个问题”
- 核心是要求AI工具:“请你以苏格拉底的方式对我进行提问”
- 然后AI工具就会给你提问,如果不知道问题的答案,可以反问AI:“你的理解(回答)是什么?”
- 如果你觉得差不多了,可以先问问AI工具:“针对我XXX知识点,我理解了吗?”
- AI工具会给出它的判断,如果你也觉得自己想清楚了,可以最后问AI工具:“我的回答结束了,请对我的回答进行评价总结”,让它帮你总结一下。
学习内容
与AI的对话一:
Me
我在学习线程同步知识点,请你以苏格拉底的方式对我进行提问,一次一个问题
AI
当然,让我们以苏格拉底的方式探讨线程同步的知识点。我会逐步提出问题,引导你深入思考。1. 你能告诉我什么是线程吗?它们与进程有何不同?
Me
线程(Thread)和进程(Process)都是计算机操作系统中用于执行程序代码的基本单位,但它们之间有一些关键的不同之处。
1. 进程(Process)进程是操作系统分配资源(如内存、CPU时间等)的基本单位。每个进程都有独立的地址空间、代码、数据和其他资源。一个进程可以包含多个线程。
特点:
进程是系统资源分配的基本单位。
每个进程有自己独立的地址空间和资源。
进程间的通信(IPC)通常比线程间的通信更复杂,因为它们拥有独立的内存空间。
进程之间的隔离性强,一个进程的崩溃通常不会影响其他进程。2. 线程(Thread)线程是进程中的执行单元,是操作系统调度的基本单位。一个进程可以有多个线程,这些线程共享同一进程的资源(如内存、文件句柄等),但每个线程有自己的执行栈、寄存器等。
特点:
线程是进程内部的一个执行单元,共享同一进程的内存和资源。
同一进程中的线程之间的通信(例如通过共享内存)相对容易。
线程的创建和销毁开销小,效率高。
由于线程共享进程的资源,一个线程的崩溃可能会影响到同一进程中的其他线程。3. 线程与进程的区别特性 进程 线程
资源独立性 每个进程有独立的地址空间和资源 线程共享同一进程的资源(如内存)
创建/销毁开销 相对较大,创建一个新进程需要操作系统分配资源 相对较小,创建和销毁线程开销较低
执行单元 进程是程序执行的基本单位 线程是进程中的执行单元
通信方式 进程间通信(IPC)需要通过操作系统提供的机制,如管道、消息队列、共享内存等 线程间通信较为简单,可以直接访问共享内存
崩溃影响 一个进程崩溃通常不会影响其他进程 线程崩溃可能影响整个进程
4. 多线程和多进程的对比多进程:在多进程模型中,每个进程运行在独立的地址空间中,互不干扰。适合于需要强隔离的应用,但进程间通信相对较为复杂,创建销毁进程的开销也较大。
多线程:多线程模型适用于需要高并发的应用,线程之间共享内存,因此数据交换更为高效。但是由于线程共享资源,一个线程的问题可能影响到整个进程。总结:进程是资源分配的基本单位,通常相互独立,适合做隔离性强的任务。
线程是执行的基本单位,多个线程可以在同一个进程内高效地共享资源,适合需要高并发和共享资源的任务。这两者各有优缺点,通常根据应用场景来选择是采用多进程还是多线程。
AI
非常好,你已经详细解释了线程和进程的区别以及它们的特点。接下来,让我们探讨线程同步的问题。2. 既然线程可以共享同一进程的资源,那么这是否会带来什么问题?具体来说,当多个线程同时访问和修改同一个资源时,可能会发生什么样的情况?
Me
是的,线程共享同一进程的资源确实会带来一些潜在的问题,特别是在多个线程同时访问和修改共享资源时。这种情况通常会导致 竞态条件(Race Condition)、数据不一致性、死锁 等问题。下面我会具体解释这些问题,并且给出一些可能的解决方案。
1. 竞态条件(Race Condition)竞态条件是指多个线程在并发执行时,如果它们在没有适当同步机制的情况下访问共享资源,就可能导致不同线程之间的操作顺序不同,从而产生不确定的结果。
举例:假设有两个线程,它们都需要更新一个共享的计数器 counter,并且操作是这样的:counter = 0# 线程1
counter += 1# 线程2
counter += 1如果这两个线程同时执行,那么在某些情况下,线程1和线程2都读取了 counter 的当前值(假设是 0),然后都将其加1并写回结果。最终, counter 只会增加到 1,而不是 2,导致数据的不一致。
竞态条件的根源:线程在修改共享数据时,操作是分步进行的。比如读取、修改、写入的过程。多个线程可能会在中间步骤相互“打断”,导致最终的结果不是预期的。2. 数据不一致性(Data Inconsistency)当多个线程同时读写共享资源时,可能会导致数据的不一致。即某个线程对共享数据进行修改的过程还没有完成,其他线程就开始访问该数据,导致读取到不完整或错误的数据。
举例:假设有一个账户余额 balance,多个线程需要对其进行存取操作:balance = 100# 线程1
balance -= 50 # 取款操作# 线程2
balance += 30 # 存款操作如果这两个线程并发执行,且没有同步控制,可能会发生如下情况:
线程1读取 balance 的值(100),然后减去50。
线程2读取 balance 的值(100),然后加上30。
最终 balance 的值应该是 80(100 - 50 + 30),但由于两者的操作没有同步控制,balance 可能只减去50或加上30,导致不一致。3. 死锁(Deadlock)死锁发生在多个线程在等待彼此释放资源时形成的循环依赖,导致所有线程都无法继续执行下去。
举例:假设有两个线程,它们需要访问两个资源 resource1 和 resource2:
线程1先锁定 resource1,然后请求 resource2。
线程2先锁定 resource2,然后请求 resource1。如果两个线程同时发生上述情况,就会进入死锁状态:
线程1 正在等待 resource2,而线程2 正在等待 resource1,双方都无法继续执行,导致程序无法推进。4. 解决共享资源带来的问题为了避免这些问题,通常会使用同步机制来控制多个线程对共享资源的访问。以下是几种常见的解决方法:
1) 互斥锁(Mutex)互斥锁是用来保证在同一时刻只有一个线程能够访问共享资源。当一个线程获得锁时,其他线程必须等待该线程释放锁。import threadinglock = threading.Lock()
counter = 0def increment():global counterwith lock: # 在此块内的操作是同步的,只有一个线程可以进入counter += 12) 信号量(Semaphore)信号量是一个计数器,表示对共享资源的访问权限。它通常用来控制同时访问共享资源的线程数量。
3) 读写锁(Read-Write Lock)在读写锁机制中,当有多个线程需要读取共享资源时,它们可以并行执行;但如果有线程需要写入共享资源,则其他线程(无论是读还是写)都必须等待。这种机制可以有效提高并发读操作的效率。
4) 条件变量(Condition Variable)条件变量用于线程间的协调,允许一个线程在某些条件成立时继续执行,而另一个线程可以在等待某个条件发生时被阻塞。
5) 原子操作(Atomic Operations)原子操作是指不可被中断的操作。许多现代处理器提供了硬件支持的原子操作,例如 Compare-and-Swap (CAS),可以保证在多线程环境中,某些关键操作不会被其他线程打断,保证数据的一致性。
5. 总结:当多个线程共享资源时,确实会带来一些并发问题,尤其是竞态条件、数据不一致性和死锁。这些问题通常可以通过各种同步机制来解决,确保线程安全。不同的同步机制适用于不同的场景,开发人员需要根据具体情况选择合适的方案。
AI
非常好,你已经详细解释了线程共享资源时可能遇到的问题以及一些解决方案。现在,让我们深入探讨线程同步的具体机制。3. 你能否详细解释一下互斥锁(Mutex)是如何工作的?它是如何确保线程安全的?
Me
互斥锁(Mutex, Mutual Exclusion)是一种用于同步访问共享资源的机制,主要目的是确保在多线程环境中,某一时刻只有一个线程能够访问特定的共享资源,从而避免数据竞争和竞态条件,确保程序的线程安全。
互斥锁的核心思想是:通过对共享资源的访问进行控制,确保同一时刻只有一个线程可以操作资源。当其他线程尝试访问被锁定的资源时,它们必须等待,直到锁被释放。
互斥锁的工作原理加锁(Lock):
当一个线程想要访问共享资源时,它需要请求获取锁。互斥锁的主要作用是通过加锁,保证同一时间内只有一个线程可以访问受保护的资源。
如果锁是可用的(即当前没有任何线程持有该锁),线程可以成功地获取锁,并开始访问共享资源。
如果锁已经被其他线程持有,那么当前线程会被阻塞(挂起),直到锁被释放。
释放锁(Unlock):
一旦线程完成了对共享资源的访问,它必须释放锁,以便其他线程能够访问共享资源。
锁的状态:
已锁定:某个线程已经成功获取了锁,其他线程不能访问该资源,直到该线程释放锁。
未锁定:锁处于空闲状态,任何线程都可以获取它。互斥锁的工作流程线程 A 请求锁并成功获取锁。
线程 B 也请求锁,但是由于线程 A 已经获取了锁,线程 B 会被挂起并等待。
线程 A 完成任务后释放锁。
线程 B 被唤醒,成功获取锁并开始任务。通过这种方式,互斥锁有效地避免了多个线程同时访问共享资源,从而防止了竞态条件和数据不一致问题。
互斥锁如何确保线程安全1. 保护共享资源互斥锁确保在任何时刻,只有一个线程能够访问和修改共享资源。其他线程即使试图访问该资源,也必须等待锁被释放。通过这种方式,多个线程之间的访问不会互相干扰,避免了并发修改同一资源可能带来的错误。
2. 避免竞态条件竞态条件(Race Condition)是指两个或多个线程并发执行时,它们的执行顺序对程序的结果产生影响,导致不一致的结果。使用互斥锁,多个线程无法同时修改共享资源,因此避免了竞态条件的发生。
3. 控制资源访问的顺序通过互斥锁,线程访问共享资源的顺序可以严格控制。即使多个线程在同一时刻请求锁,系统会保证它们按照一定的顺序访问资源,这有助于确保资源的正确性和一致性。
4. 保护临界区临界区(Critical Section)是指访问共享资源的代码区域。在多线程环境中,多个线程可能同时进入临界区,导致数据错误或不一致。互斥锁的作用就是保护临界区,确保每次只有一个线程能够进入临界区。
互斥锁的实现机制互斥锁通常依赖于操作系统的原子操作来实现。这些原子操作确保了在操作锁时,操作是不可中断的,即操作不会被线程切换打断。以下是互斥锁的典型实现流程:
请求锁:线程尝试以原子操作检查锁的状态。如果锁是空闲的,线程会成功获取锁并进入临界区。如果锁已被其他线程持有,线程会等待。
原子操作:获取锁的过程通常是通过原子操作实现的,例如 test-and-set、compare-and-swap 等。通过这些原子操作,线程可以确保获取锁的过程不会被打断,防止多个线程同时进入临界区。
释放锁:当线程完成对共享资源的访问后,它会释放锁。这通常是通过原子操作来执行的,保证释放锁的过程是线程安全的。
阻塞与唤醒:如果一个线程尝试获取已经被锁定的锁,操作系统会将这个线程挂起,直到锁被释放。当锁被释放时,系统会唤醒等待队列中的一个线程,让它获取锁并进入临界区。互斥锁的使用示例(C语言)在 C 语言中,互斥锁通常通过 pthread 库来实现,具体方法如下:#include <stdio.h>
#include <pthread.h>pthread_mutex_t lock; // 定义一个互斥锁
int counter = 0; // 共享资源// 线程函数:增加计数器
void* increment(void* arg) {for (int i = 0; i < 1000000; i++) {pthread_mutex_lock(&lock); // 加锁,开始访问共享资源counter++; // 共享资源修改pthread_mutex_unlock(&lock); // 解锁,释放资源}return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lock, NULL);// 创建两个线程pthread_create(&thread1, NULL, increment, NULL);pthread_create(&thread2, NULL, increment, NULL);// 等待线程完成pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lock);// 打印最终的计数器值printf("Final counter value: %d\n", counter);return 0;
}互斥锁的关键步骤:初始化互斥锁:
在使用之前,需要初始化互斥锁。例如,使用 pthread_mutex_init 函数。
加锁:
当线程准备访问共享资源时,使用 pthread_mutex_lock 请求锁。如果锁已经被其他线程持有,当前线程会被阻塞,直到锁被释放。
访问共享资源:
只有一个线程可以在同一时刻访问共享资源,保证了数据的安全性。
解锁:
当线程完成共享资源的操作时,使用 pthread_mutex_unlock 释放锁,这样其他线程就可以获取锁并访问资源。
销毁锁:
当互斥锁不再需要时,可以使用 pthread_mutex_destroy 销毁锁。互斥锁的限制尽管互斥锁非常有效,但它也有一些限制:
性能开销:使用互斥锁时,线程会被阻塞和唤醒,这会导致性能下降,特别是在频繁加锁和解锁的高并发场景中。
死锁:如果多个线程之间的锁获取顺序不当,可能会导致死锁。为了避免死锁,线程应该按相同的顺序获取锁,或者使用更高级的同步机制(如读写锁)。总结互斥锁是确保多线程程序线程安全的基本工具。通过对共享资源的加锁和解锁操作,它保证在任何时刻,只有一个线程可以访问资源,从而避免了竞态条件和数据不一致的问题。互斥锁的实现依赖于操作系统提供的原子操作,且需要在多线程编程中小心使用,避免死锁等问题。
AI
非常好,你已经详细解释了互斥锁的工作原理和它如何确保线程安全。接下来,让我们探讨互斥锁在实际编程中的应用。4. 在实际编程中,我们应该如何正确地使用互斥锁来避免死锁?你能否提供一个实际的编程示例来说明如何避免死锁?
Me
在多线程编程中,死锁是一个非常常见且棘手的问题,它发生在多个线程互相等待彼此持有的锁时,导致程序无法继续执行。避免死锁需要仔细设计线程间的锁获取顺序,并遵循一些最佳实践。以下是一些常见的避免死锁的方法和策略。
如何避免死锁1. 避免锁的嵌套(Lock Nesting)死锁的一个常见原因是多个线程同时持有多个锁。为了避免死锁,我们应该尽量避免在持有一个锁的情况下去请求其他锁。这会增加死锁的风险。
如果必须嵌套锁(例如,多个锁需要保护多个共享资源),确保锁的获取顺序是一致的,也就是说,所有线程获取锁的顺序必须相同。
2. 锁的获取顺序一致性如果系统中有多个线程需要获取多个锁,应该定义一个全局的锁获取顺序,并要求所有线程都遵循这个顺序。例如,如果有两个锁 lockA 和 lockB,所有线程都应该先获取 lockA,然后获取 lockB,而不能反过来。
这样,如果所有线程都遵循相同的顺序,就避免了循环等待(死锁的根本原因)。
3. 使用超时机制(Timeout)设置一个超时机制,当线程在等待某个锁时,若超过预定的时间仍未获取锁,则放弃并返回,避免一直死锁。可以通过 pthread_mutex_timedlock 等机制来实现超时机制。
4. 使用更细粒度的锁可以通过减少锁的持有时间来避免死锁。不要长时间持有锁,尽量缩小临界区的范围,确保锁的持有时间最小化,减少线程间的冲突和死锁的机会。
5. 死锁检测在一些高级的多线程库或系统中,可能会有死锁检测的功能。如果系统检测到死锁,通常会采取一些处理措施(如强制终止某些线程、重启程序等)。
死锁的示例假设有两个线程,它们需要访问两个资源(两个锁)。其中一个线程获取锁A,另一个线程获取锁B,最终导致死锁。
c
#include <stdio.h>
#include <pthread.h>pthread_mutex_t lockA, lockB;void* thread1_func(void* arg) {pthread_mutex_lock(&lockA); // 获取 lockAprintf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些工作pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");sleep(1); // 模拟一些工作pthread_mutex_lock(&lockA); // 获取 lockAprintf("Thread 2 acquired lockA\n");pthread_mutex_unlock(&lockA);pthread_mutex_unlock(&lockB);return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);// 创建线程pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func, NULL);// 等待线程完成pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}死锁原因分析:线程 1 在获取 lockA 后等待 lockB。
线程 2 在获取 lockB 后等待 lockA。
这样就造成了线程 1 等待线程 2,线程 2 等待线程 1,最终形成死锁。如何避免死锁要避免上述死锁问题,我们可以 统一锁的获取顺序。假设我们规定,所有线程都必须先获取 lockA,然后获取 lockB,而不是反过来。
改进后的代码:c
#include <stdio.h>
#include <pthread.h>pthread_mutex_t lockA, lockB;void* thread1_func(void* arg) {pthread_mutex_lock(&lockA); // 先获取 lockAprintf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些工作pthread_mutex_lock(&lockB); // 然后获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {pthread_mutex_lock(&lockA); // 先获取 lockAprintf("Thread 2 acquired lockA\n");sleep(1); // 模拟一些工作pthread_mutex_lock(&lockB); // 然后获取 lockBprintf("Thread 2 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);// 创建线程pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func, NULL);// 等待线程完成pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}解释:统一锁获取顺序:我们强制线程 1 和线程 2 都必须先获取 lockA,再获取 lockB。通过这种方式,避免了两个线程相互等待对方的锁,从而消除了死锁的风险。
死锁消失:无论线程 1 还是线程 2,它们在访问 lockA 后都会去访问 lockB,而不会形成循环等待。其他死锁预防措施:使用超时机制:如果一个线程在获取锁时,经过了一定时间仍未能成功获得锁,它可以选择放弃并返回,而不是一直等待。这样可以避免因锁长期无法释放而导致的死锁。
避免锁的嵌套:尽量减少线程之间锁的嵌套。如果必须嵌套多个锁,尽量减少锁的数量,或者只对较少的资源加锁。总结死锁是多线程编程中一个难以避免的问题,但通过良好的锁设计和获取顺序,完全可以避免死锁的发生。以下是一些避免死锁的常见策略:
一致的锁获取顺序:保证所有线程都按照相同的顺序获取锁。
避免锁嵌套:减少锁的层次,避免多个锁同时存在。
超时机制:给线程设置超时,避免无限等待锁。通过这些措施,可以大大减少程序中的死锁发生概率,并提高多线程程序的健壮性和稳定性。
AI
非常好,你已经详细解释了如何避免死锁以及提供了实际的编程示例。现在,让我们继续探讨线程同步的另一个重要方面。5. 在使用互斥锁时,我们如何确保锁一定会被释放?有没有可能一个线程在持有锁的情况下异常退出,导致锁永远无法释放?如果发生这种情况,我们应该怎么办?
Me
在多线程编程中,确实存在一个风险,即在持有锁的线程异常退出时,锁可能永远无法释放,从而导致死锁。这是一个非常重要的多线程编程问题,通常被称为锁泄漏(Lock Leak)。为了确保锁在异常情况下也能被释放,我们需要采取一些措施来保证锁的正确释放。
1. 如何确保锁一定会被释放在多线程程序中,确保锁能够在线程退出时始终被释放,常用的做法是使用 “RAII(Resource Acquisition Is Initialization)” 模式,或者利用类似机制(如 C++ 中的 std::lock_guard 或 Python 中的 with 语句)。RAII 模式保证了在对象生命周期结束时会自动释放资源。
对于 C 语言,我们没有类似 C++ 中的 std::lock_guard,但我们可以通过 pthread_cleanup_push 和 pthread_cleanup_pop 机制来保证锁的释放,或者更常见的做法是使用 try-finally 结构的替代方法(通过 pthread 的错误处理机制)。
2. 线程异常退出时的处理如果一个线程在持有锁的情况下发生了异常或提前退出,锁的释放可能会被忽略。为了避免这种情况,我们可以使用以下方法来确保即使发生异常或线程退出,锁也会被正确释放。
3. 解决方案:使用 pthread_cleanup_push 和 pthread_cleanup_pop在 C 语言中,可以使用 pthread_cleanup_push 和 pthread_cleanup_pop 来确保锁在线程退出时被正确释放。
pthread_cleanup_push:注册一个清理处理函数,该函数会在线程退出时自动执行。
pthread_cleanup_pop:撤销清理处理函数的注册,并且会在函数返回时执行该函数。示例:使用 pthread_cleanup_push 和 pthread_cleanup_pop 保证锁释放c
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lock;void cleanup(void* arg) {// 清理函数:释放锁pthread_mutex_unlock(&lock);printf("Lock released by cleanup function.\n");
}void* thread_func(void* arg) {// 线程开始,首先加锁pthread_mutex_lock(&lock);printf("Thread acquired the lock.\n");// 注册清理函数,确保锁会被释放pthread_cleanup_push(cleanup, NULL);// 模拟一些操作,可能发生异常或提前退出sleep(2); // 假设这里发生了异常退出// 如果线程正常结束,清理函数会自动执行pthread_cleanup_pop(1); // 清理函数将在此被执行return NULL;
}int main() {pthread_t thread1;// 初始化互斥锁pthread_mutex_init(&lock, NULL);// 创建线程pthread_create(&thread1, NULL, thread_func, NULL);// 等待线程结束pthread_join(thread1, NULL);// 销毁互斥锁pthread_mutex_destroy(&lock);return 0;
}解释:pthread_cleanup_push 和 pthread_cleanup_pop:我们在线程函数中使用了 pthread_cleanup_push 来注册清理函数 cleanup,该清理函数会在线程退出时自动调用。在 cleanup 函数中,我们释放了锁 lock。通过这种方式,即使线程在执行期间发生了异常退出,锁也能被正确释放。
pthread_cleanup_pop(1):如果线程正常执行到 pthread_cleanup_pop,清理函数会被调用,从而释放锁。如果线程异常退出(例如通过 return 或其他方式),清理函数同样会被执行。4. 避免异常退出导致锁泄漏的其他方法除了使用 pthread_cleanup_push 和 pthread_cleanup_pop,还有其他一些通用的做法来确保锁被释放:
(1) 尽量避免长时间持有锁在设计多线程程序时,应该尽量避免长时间持有锁。短小的临界区能够减少锁泄漏的风险,因为锁的持有时间较短,线程发生异常的几率也较小。(2) 使用 try-finally 结构的替代在 C 语言中,没有 try-finally 这样的结构,但可以通过 goto 或其他控制结构来模拟。通常可以在代码中使用清理代码块来确保锁被释放。(3) 避免线程异常退出如果一个线程在执行过程中发生了异常或提前退出,确保异常处理机制能够捕获并处理异常,避免线程无序退出。对于线程库中没有内置异常机制的语言,线程退出时应该有合适的清理代码。(4) 控制锁的嵌套层次尽量避免锁的嵌套。每个线程应该避免在持有锁的情况下再去请求其他锁。这样可以减少死锁和锁泄漏的风险。5. 总结问题:在多线程程序中,一个线程在持有锁的情况下异常退出,可能导致锁永远无法释放,从而引发死锁或资源泄漏。
解决方案:通过使用 pthread_cleanup_push 和 pthread_cleanup_pop,我们可以确保锁在线程退出时被释放,无论是正常退出还是异常退出。
其他技巧:
尽量减少锁的持有时间。
在设计时遵循良好的锁获取顺序,避免锁嵌套。
在多线程编程中谨慎处理异常和线程退出,以保证资源的正确清理。通过这些方式,可以显著减少锁泄漏的风险,从而确保多线程程序的稳定性和健壮性。
Me
针对我线程同步知识点,我理解了吗?
AI
是的,从你之前的回答来看,你对线程同步的知识点有一个很好的理解。你详细解释了线程与进程的区别、竞态条件、数据不一致性、死锁以及互斥锁的工作原理和使用。你还讨论了如何避免死锁和确保锁一定会被释放的策略。这些都是线程同步中的核心概念和实践。
Me
我的回答结束了,请对我的回答进行评价总结
AI
你的回答体现了对线程同步和互斥锁使用的深刻理解。以下是对你回答的评价和总结:1. **全面性**:- 你的回答涵盖了线程同步的多个方面,包括线程与进程的区别、竞态条件、死锁、互斥锁的工作原理以及避免死锁的策略。- 你提供了实际的编程示例来说明如何使用互斥锁以及如何避免死锁,这有助于理解理论如何应用于实践。2. **准确性**:- 你的解释准确地反映了线程同步的核心概念,包括互斥锁的使用方法和避免死锁的最佳实践。- 你提到了RAII模式,这是C++中管理资源的一种常见方式,虽然C语言中没有直接支持,但你正确地指出了C语言中如何通过其他机制(如`pthread_cleanup_push`和`pthread_cleanup_pop`)来实现类似的功能。3. **清晰性**:- 你的回答逻辑清晰,步骤分明,容易理解。- 你使用了清晰的语言和结构来解释复杂的概念,使得读者即使没有深厚的背景知识也能理解。4. **实用性**:- 你提供的建议和策略都是实用的,可以直接应用于多线程编程中。- 你强调了减少锁持有时间、避免锁嵌套和使用超时机制等实用技巧,这些都是提高程序性能和稳定性的关键点。5. **改进建议**:- 虽然你的回答已经非常全面,但在讨论避免死锁的策略时,可以进一步讨论如何设计程序结构来自然避免锁的嵌套,例如通过将资源的访问封装在单独的函数中,或者使用设计模式如代理模式来管理资源访问。总的来说,你的回答显示了对线程同步和互斥锁使用的深入理解,能够为那些希望深入了解这些概念的人提供宝贵的信息和指导。
与AI的对话二:
Me
我在学习死锁知识点,请你以苏格拉底的方式对我进行提问,一次一个问题
AI
当然,让我们开始这个探索过程。1. 你能描述一下什么是死锁吗?它在多线程环境中是如何发生的?
Me
死锁是指在多线程或多进程环境中,两个或多个线程相互等待对方释放资源,导致它们无法继续执行,程序进入一种无法恢复的状态。死锁通常会使程序停滞不前,影响系统的正常运行。
死锁的四个必要条件死锁的发生通常需要满足以下四个条件,这四个条件是死锁的“必要条件”,也被称为“死锁四大条件”:
互斥条件:
至少有一个资源是以互斥的方式分配的,即同一时刻只能有一个线程持有该资源。
占有并等待条件:
一个线程在持有至少一个资源的同时,等待获取其他资源,即该线程在等待过程中并没有释放已占有的资源。
非抢占条件:
资源不能被强行从线程中剥夺,只能由持有该资源的线程自愿释放。
循环等待条件:
存在一种循环关系,线程 A 等待线程 B 持有的资源,线程 B 等待线程 C 持有的资源,线程 C 又等待线程 A 持有的资源,从而形成一个循环等待的链条。死锁的发生过程在多线程程序中,死锁通常发生在多个线程需要访问多个资源时。如果各个线程按照不同的顺序请求锁,可能会导致循环等待的情况,进而发生死锁。下面是一个简单的死锁发生过程:
线程 A 获取了锁 lockA,并尝试获取 lockB。
线程 B 获取了锁 lockB,并尝试获取 lockA。
由于 lockA 已被线程 A 占有,线程 B 无法获取,线程 B 就进入了等待状态。
同样,由于 lockB 已被线程 B 占有,线程 A 无法获取,线程 A 也进入了等待状态。
线程 A 和线程 B 都在等待对方释放锁,导致程序停滞不前,形成死锁。死锁的示例(C语言)以下是一个死锁的简单示例,展示了两个线程如何因为获取资源的顺序不同而导致死锁:#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lockA, lockB;void* thread1_func(void* arg) {pthread_mutex_lock(&lockA); // 获取 lockAprintf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockB); // 尝试获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockA); // 尝试获取 lockAprintf("Thread 2 acquired lockA\n");pthread_mutex_unlock(&lockA);pthread_mutex_unlock(&lockB);return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);// 创建线程pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func, NULL);// 等待线程结束pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}解释:线程 A 在持有 lockA 时,试图获取 lockB,而 线程 B 在持有 lockB 时,试图获取 lockA。
由于线程 A 和线程 B 形成了一个 循环等待,即它们相互等待对方释放锁,这种情况会导致死锁。如何避免死锁避免嵌套锁:
尽量避免在持有一个锁的情况下再请求其他锁,特别是跨越多个资源时,尽量减少锁的数量和层级。
锁的获取顺序一致性:
如果多个线程需要获取多个锁,规定一个全局的获取顺序,确保所有线程都按照相同的顺序来获取锁,从而避免循环等待。例如,线程 A 和线程 B 都应首先获取 lockA,然后获取 lockB,而不是反过来。
使用死锁检测:
在某些情况下,可以设计死锁检测机制,定期检查是否存在循环等待的情况。如果检测到死锁,采取措施(如强制释放锁,或终止某些线程)。
超时机制:
在请求锁时设置超时,如果超过一定时间仍未获得锁,则放弃并返回,避免线程长时间阻塞。
细化锁粒度:
如果可能,使用更细粒度的锁(例如读写锁),避免大范围的锁竞争,这可以减少死锁的机会。总结死锁是一种由于线程间的相互等待而导致的程序停滞状态,通常发生在多个线程竞争多个资源时。要避免死锁,我们需要确保线程在获取多个资源时遵循一致的锁获取顺序,并避免复杂的锁嵌套。
AI
你已经提供了一个非常全面的解释,包括死锁的定义、发生条件、示例代码以及避免死锁的策略。接下来,让我们继续探讨。2. 在你的示例中,线程因为获取锁的顺序不同而发生了死锁。那么,如果我们想要避免死锁,我们应该如何处理多个线程需要不同资源的情况?
Me
要避免多线程中的死锁,我们需要对资源的请求顺序进行合理的设计。当多个线程需要访问多个资源时,关键是确保避免产生循环等待的情况。以下是几种常见的策略,用于避免多线程程序中的死锁:
1. 统一的锁获取顺序最直接的避免死锁的方法是对所有线程和所有资源制定统一的锁获取顺序。也就是说,所有线程在请求多个锁时,都必须按照相同的顺序去请求锁,这样就避免了循环等待的情况。
统一锁获取顺序的策略:如果有多个锁 lockA 和 lockB,我们规定:所有线程必须先请求 lockA,然后请求 lockB,而不能反过来。
这种做法保证了即使多个线程并发运行,也不会因为不同线程持有锁的顺序不同而形成死锁。代码示例:避免死锁的统一锁获取顺序#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lockA, lockB;void* thread1_func(void* arg) {// 统一的锁获取顺序:先获取 lockA,再获取 lockBpthread_mutex_lock(&lockA);printf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {// 统一的锁获取顺序:先获取 lockA,再获取 lockBpthread_mutex_lock(&lockA);printf("Thread 2 acquired lockA\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);// 创建线程pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func, NULL);// 等待线程结束pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}解释:在上面的代码中,线程 1 和线程 2 都按照相同的顺序获取锁:先获取 lockA,然后获取 lockB。由于两者都遵循这个顺序,就不会发生死锁。即使线程 1 已经获取了 lockA,线程 2 获取了 lockA,它们仍然会在同一顺序下继续执行,不会陷入相互等待的困境。
2. 锁的层次化设计如果资源数量比较多,采用统一锁获取顺序有时会比较麻烦。这时可以采用层次化锁设计。即将多个资源分成不同的层次,每个层次内的资源按顺序请求。
示例:假设系统中有 3 种资源 lockA、lockB 和 lockC,我们可以按照以下规则进行锁的层次化设计:
层次 1:lockA
层次 2:lockB
层次 3:lockC每个线程按照资源层次顺序来获取锁,从而避免死锁。这样线程在获取多个资源时会按顺序逐层获取。
3. 使用超时机制(Timeout)为锁请求设置一个超时时间也是避免死锁的一种常见方法。如果线程请求锁时,在设定的时间内无法获得锁,则可以主动放弃或返回,避免一直等待锁的释放。这种方法在某些情况下能够避免死锁。
超时机制的示例:在 POSIX 线程库中,可以使用 pthread_mutex_timedlock 来设置超时时间。以下是一个简单的超时机制的实现方式:#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <time.h>pthread_mutex_t lockA, lockB;void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为 2 秒if (pthread_mutex_timedlock(&lockA, &ts) != 0) {printf("Thread failed to acquire lockA (timeout).\n");return NULL; // 超时,返回}printf("Thread acquired lockA\n");if (pthread_mutex_timedlock(&lockB, &ts) != 0) {printf("Thread failed to acquire lockB (timeout).\n");pthread_mutex_unlock(&lockA);return NULL; // 超时,释放 lockA 并返回}printf("Thread acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1;pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);pthread_create(&thread1, NULL, thread_func, NULL);pthread_join(thread1, NULL);pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}解释:通过 pthread_mutex_timedlock,线程尝试获取锁 lockA 和 lockB,并且设置了超时时间。如果无法在 2 秒内获取锁,则返回并释放已获取的锁。
这种方法通过控制等待的最长时间来避免死锁,从而防止线程在获取锁时无限期地阻塞。4. 避免不必要的锁嵌套减少锁的嵌套层次,可以降低死锁发生的概率。尽量避免在持有一个锁时再次请求其他锁。如果必须嵌套,应该遵循统一的获取顺序(如上面提到的第 1 点)。
5. 死锁检测与恢复在某些情况下,可能无法完全避免死锁,特别是当系统资源复杂、锁依赖关系复杂时。这时,我们可以在系统中实现死锁检测机制。死锁检测通常基于图形算法,周期性地检查是否存在循环等待的关系。如果检测到死锁,系统可以采取以下措施:
强制释放某些锁,回滚某些操作。
中断某些线程,终止死锁循环。然而,死锁检测通常增加了系统的复杂性和开销,因此在设计时应尽量避免死锁的发生。
总结统一锁获取顺序:确保所有线程按照相同的顺序请求锁,避免循环等待。
锁层次化设计:将资源分成层次,每个层次内按顺序请求资源。
超时机制:设置锁请求的超时时间,避免线程在等待锁时永远阻塞。
减少锁嵌套:尽量避免在持有一个锁时再请求其他锁,减少复杂性。
死锁检测与恢复:在系统中实现死锁检测,并在发生死锁时采取适当措施。通过这些策略,可以大大减少死锁发生的概率,确保多线程程序在访问共享资源时的健壮性。
AI
你的回答非常全面,涵盖了避免死锁的多种策略。现在,让我们继续探讨。3. 你已经提到了使用超时机制来避免死锁,那么在实际的多线程程序中,我们如何合理地设置超时时间呢?超时时间的设置是否有什么讲究?
Me
在多线程程序中,使用超时机制来避免死锁是一种有效的策略,但如何合理地设置超时时间是一个需要谨慎考虑的问题。超时时间的设置不仅影响程序的性能,还可能影响程序的稳定性和正确性。一个不恰当的超时时间设置可能会导致:
线程过早地放弃锁,影响程序的正确性和性能。
超时时间过长,依然无法避免死锁,浪费系统资源。因此,合理设置超时时间需要根据具体的应用场景、资源竞争情况以及系统的性能要求来综合考虑。
1. 超时时间设置的考虑因素合理设置超时时间时,可以考虑以下几个方面:
(1) 资源的访问频率如果锁保护的资源访问非常频繁,线程请求锁的时间可能相对较短。因此,超时值应该设置得较短,以确保线程在遇到竞争时不会长时间等待。
如果资源的访问频率较低,超时值可以稍微长一点,以确保线程有足够的时间来获取锁。(2) 锁的竞争程度如果多个线程同时竞争同一资源,导致锁的请求被频繁阻塞,设置较短的超时可以帮助系统更快地恢复,避免系统长时间进入阻塞状态。
如果锁竞争不激烈,超时时间可以设置得更长,以便线程有更多机会获得锁。(3) 任务的紧急性对于某些紧急任务,线程可能需要在较短的时间内完成任务,不能容忍长时间的阻塞。此时,可以设置较短的超时时间,以尽快发现并解决问题。
对于非实时任务,超时时间可以适当延长,以便线程在等待锁的过程中有更多的机会执行其他操作。(4) 系统的负载和资源情况在高负载或高并发的系统中,线程间的竞争可能更加激烈,因此设置较短的超时时间有助于避免系统过度阻塞。
在资源相对空闲的系统中,设置较长的超时时间可能更合适,这样可以减少线程的频繁超时重试,增加系统的吞吐量。(5) 锁的持有时间如果锁的持有时间通常较长,设置过短的超时时间可能导致频繁的超时和线程重试,从而降低性能。反之,如果锁持有时间很短,短超时可能是有效的,减少线程的阻塞时间。(6) 程序的容忍度如果程序对死锁或长时间阻塞较为敏感,可以设置较短的超时时间,尽早发现问题并采取措施。
如果程序的容错性较高,且能够在超时发生时采取适当的恢复措施,可以适当增加超时时间。2. 超时时间的计算策略在实际编程中,设置合理的超时时间通常有以下几种策略:
(1) 基于操作的复杂性对于每个锁操作,超时时间的设置可以基于该操作的预期完成时间。比如:
短时间操作:如果一个操作预计很快完成,可以设置一个较短的超时时间(比如几百毫秒或1秒)。
长时间操作:如果操作可能需要较长时间才能完成,可以设置一个较长的超时时间(比如 2-5 秒),但不要过长,以避免不必要的等待。(2) 自适应超时在某些情况下,可以动态调整超时时间。例如,如果某个锁的获取失败,线程可以根据过去的锁竞争情况(如当前系统负载)调整下一次的超时时间。这种方式的优势是可以根据实时情况自动调整超时,优化性能。(3) 根据历史经验设置在开发过程中,通常会根据系统的运行状况或历史经验来估算合理的超时时间。例如,如果发现大多数线程都能在 100 毫秒内获取锁,可以设置超时时间为 200 毫秒,给线程一些缓冲时间。(4) 固定时间+指数回退一些复杂的系统可能会使用固定的初始超时值,然后随着失败次数的增加,采用指数回退策略。例如,第一个超时可以设置为 100 毫秒,如果失败,则第二次尝试的超时时间为 200 毫秒,再次失败时设置为 400 毫秒,以此类推。这个策略有助于在高竞争环境中逐步增加等待时间,从而避免系统资源被过度消耗。3. 超时机制的使用示例以下是一个基于超时机制的示例,它展示了如何在 C 语言中使用 pthread_mutex_timedlock 来设置超时,并根据超时情况做出不同的处理。#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <time.h>pthread_mutex_t lockA, lockB;void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为 2 秒// 尝试获取 lockAif (pthread_mutex_timedlock(&lockA, &ts) != 0) {printf("Thread failed to acquire lockA (timeout).\n");return NULL; // 超时,返回}printf("Thread acquired lockA\n");// 尝试获取 lockBif (pthread_mutex_timedlock(&lockB, &ts) != 0) {printf("Thread failed to acquire lockB (timeout).\n");pthread_mutex_unlock(&lockA);return NULL; // 超时,释放 lockA 并返回}printf("Thread acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);pthread_create(&thread1, NULL, thread_func, NULL);pthread_join(thread1, NULL);pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}4. 总结:如何合理设置超时时间基于资源访问频率:高频访问的资源,超时设置较短,低频访问的资源,超时设置较长。
考虑锁竞争程度:高竞争的资源,超时应短;竞争较少时,超时可以稍长。
任务紧急性:紧急任务超时设置短,非实时任务超时设置稍长。
超时策略:可以设置固定的超时,也可以使用指数回退等自适应超时策略。
避免过短或过长:过短的超时可能导致频繁的失败,过长的超时可能延迟发现问题。合理设置一个平衡点。通过综合考虑这些因素,可以设定合适的超时时间,避免死锁并提高系统的性能和稳定性。
AI
你的回答非常到位,详细讨论了设置超时时间时需要考虑的因素以及一些实用的策略。这为多线程程序中如何合理使用超时机制提供了很好的指导。4. 在你提到的超时机制中,如果一个线程因为超时而未能获取锁,它通常会放弃并返回。那么,我们应该如何处理这种情况,以确保程序的健壮性和正确性?
Me
当一个线程因为超时未能获取锁并选择放弃时,如何处理这种情况是非常重要的,它直接影响到程序的健壮性和正确性。如果没有合理的处理,可能会导致程序进入不一致的状态、资源泄漏或其他不良后果。
处理超时未能获取锁的情况通常,当线程在超时后未能获取锁时,应该采取以下几种处理方式之一:
重试机制
回退操作
错误处理和日志记录
资源释放
回调或通知机制1. 重试机制当线程因超时未能获取锁时,可以根据实际情况选择是否重试。重试的目的是给线程再次获取锁的机会,这种方式在某些场景下是有效的。例如,如果锁的竞争较为暂时或系统负载较高,稍等一段时间后,可能能够成功获取锁。
实现方式:短暂重试:在短时间内连续尝试若干次获取锁。
指数回退:每次超时后,等待时间逐渐增加(比如从 100 毫秒、200 毫秒、400 毫秒开始)。重试的次数和策略需要小心设置,否则可能导致性能问题,甚至死锁。
示例:带有重试机制的超时处理#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <time.h>pthread_mutex_t lockA, lockB;#define MAX_RETRIES 3
#define RETRY_DELAY 1000000 // 微秒(1秒 = 1000000微秒)void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为 2 秒int retries = 0;while (retries < MAX_RETRIES) {if (pthread_mutex_timedlock(&lockA, &ts) == 0) {printf("Thread acquired lockA\n");break;} else {retries++;printf("Thread failed to acquire lockA (timeout), retrying... (%d)\n", retries);usleep(RETRY_DELAY); // 暂停一段时间后重试}}if (retries == MAX_RETRIES) {printf("Thread failed to acquire lockA after %d retries.\n", MAX_RETRIES);return NULL; // 超过最大重试次数,放弃获取锁}// 尝试获取 lockBif (pthread_mutex_timedlock(&lockB, &ts) != 0) {printf("Thread failed to acquire lockB (timeout).\n");pthread_mutex_unlock(&lockA); // 释放已获取的 lockAreturn NULL;}printf("Thread acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1;pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);pthread_create(&thread1, NULL, thread_func, NULL);pthread_join(thread1, NULL);pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}2. 回退操作如果线程无法获取锁,可以进行回退操作。回退操作是指,当线程未能获取锁时,回到一个安全的、之前已知的状态,或者执行一些默认行为,避免系统进入不一致的状态。回退可以是:
恢复到上次成功的状态,进行某些操作(例如,恢复文件、数据库状态等)。
执行一些简化的替代操作,或者执行一些不依赖锁的操作。示例:如果一个线程需要获取多个锁来完成数据库操作,但因超时未能获取锁,它可以选择将这部分操作放弃,或使用某种默认值来继续执行其他不依赖于锁的操作。3. 错误处理和日志记录当线程无法获取锁时,我们应当记录日志并进行错误处理。这有助于后期调试和诊断,特别是在高并发的生产环境中。日志应当包括:
锁超时发生的时间。
失败的资源或锁。
是否尝试过重试机制,以及重试的次数。
线程的状态(如等待的线程数,当前系统负载等)。示例:记录日志#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <time.h>pthread_mutex_t lockA, lockB;void log_error(const char* message) {// 这里可以记录日志到文件或控制台printf("ERROR: %s\n", message);
}void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为 2 秒if (pthread_mutex_timedlock(&lockA, &ts) != 0) {log_error("Thread failed to acquire lockA (timeout).");return NULL;}printf("Thread acquired lockA\n");if (pthread_mutex_timedlock(&lockB, &ts) != 0) {log_error("Thread failed to acquire lockB (timeout).");pthread_mutex_unlock(&lockA);return NULL;}printf("Thread acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}int main() {pthread_t thread1;pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);pthread_create(&thread1, NULL, thread_func, NULL);pthread_join(thread1, NULL);pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}4. 资源释放与清理当线程因超时未能获取锁时,它应该释放所有已获取的资源,包括已经成功获取的锁,以避免资源泄漏和系统状态不一致。这对于防止死锁、内存泄漏等问题非常重要。
释放所有资源:在超时或错误发生时,确保释放所有已获得的资源。
清理任务:清理可能会影响后续线程执行的资源(如内存、文件描述符等)。示例:资源清理if (pthread_mutex_unlock(&lockA) != 0) {log_error("Failed to release lockA.");
}5. 回调或通知机制当线程无法获取锁时,可以使用回调函数或通知机制,通知其他线程或系统组件进行相应的处理。例如,某些线程可能依赖于获取锁的线程进行某些操作,超时后它们可以通过回调或消息通知来执行其他操作。
示例:通过通知其他线程// 假设使用条件变量来通知其他线程
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;void* thread_func(void* arg) {// 尝试获取锁if (pthread_mutex_lock(&lockA) != 0) {log_error("Failed to acquire lockA");pthread_cond_signal(&cond); // 通知其他线程return NULL;}// 继续执行pthread_cond_signal(&cond); // 通知其他线程return NULL;
}int main() {pthread_t thread1;pthread_create(&thread1, NULL, thread_func, NULL);pthread_cond_wait(&cond, &lockA); // 等待通知pthread_join(thread1, NULL);
}总结:如何处理超时未能获取锁的情况重试机制:可以设置短暂的重试机制,尝试重新获取锁。确保避免资源竞争过度时导致性能下降。
回退操作:如果超时未获取锁,可以执行一些回退操作或默认行为,以保证系统的一致性。
错误处理和日志记录:确保记录详细的错误日志,以便后续分析和调试。
资源释放和清理:在超时或错误情况下,及时释放已占用的资源,避免内存泄漏或死锁。
回调或通知机制:通过通知或回调机制,告知其他线程或系统采取应对措施。通过这些策略,可以确保即使线程在超时后未能获取锁,也能保证系统的健壮性、稳定性和正确性。
AI
你的回答非常全面,提供了多种处理线程因超时而未能获取锁的策略,包括重试机制、回退操作、错误处理和日志记录、资源释放与清理以及回调或通知机制。这些策略有助于确保程序在面对锁竞争和超时时的健壮性和正确性。5. 在你提到的重试机制中,如果线程在重试多次后仍然无法获取锁,我们是否应该直接放弃?还是说有其他更合适的处理方式?
Me
当线程在重试多次后仍然无法获取锁时,是否应该直接放弃并退出,还是采取其他处理方式,取决于具体的应用场景、系统需求和线程的任务重要性。没有一种“万能”的答案,但可以根据不同的情况采取不同的策略。以下是几种常见的处理方式:
1. 直接放弃并退出如果重试多次仍然无法获取锁,最简单且直接的方式就是放弃操作,退出线程。适用于以下场景:
任务不重要或可丢弃:如果线程的任务并不关键,或者任务丢失不会对系统产生严重后果,放弃操作可能是最合适的选择。
避免系统过载:线程不断重试会占用 CPU 时间和系统资源,甚至可能导致系统过载。此时,放弃操作能够避免资源浪费,保持系统稳定。
失败后无需恢复:如果任务失败后没有必要进行恢复(例如,操作不可重试或者操作无副作用),直接放弃是一个简单有效的选择。示例:线程重试次数超过最大限制后直接放弃#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <time.h>pthread_mutex_t lockA;#define MAX_RETRIES 5
#define RETRY_DELAY 1000000 // 1秒void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为2秒int retries = 0;while (retries < MAX_RETRIES) {if (pthread_mutex_timedlock(&lockA, &ts) == 0) {printf("Thread acquired lockA\n");pthread_mutex_unlock(&lockA);return NULL; // 成功获取锁,完成任务} else {retries++;printf("Thread failed to acquire lockA, retrying... (%d/%d)\n", retries, MAX_RETRIES);usleep(RETRY_DELAY); // 暂停一段时间后重试}}// 重试次数超出限制,直接放弃printf("Thread failed to acquire lockA after %d retries. Giving up.\n", MAX_RETRIES);return NULL;
}int main() {pthread_t thread1;pthread_mutex_init(&lockA, NULL);pthread_create(&thread1, NULL, thread_func, NULL);pthread_join(thread1, NULL);pthread_mutex_destroy(&lockA);return 0;
}2. 降级操作如果重试多次仍无法获取锁,并且放弃操作可能导致程序状态不一致或数据丢失,可以考虑执行降级操作。降级操作是指当锁无法被获取时,线程执行一个简化版的任务或执行一个备用的、不需要锁的操作。这种方式适用于:
任务不需要全部完成:即使不能获取全部资源,部分工作仍然可以完成。比如,只处理部分数据或执行某些无需锁的操作。
系统需求容错性较高:即使某些操作没有获得所有资源,也能在较低的性能下继续工作,避免系统崩溃。示例:降级操作void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为2秒int retries = 0;while (retries < MAX_RETRIES) {if (pthread_mutex_timedlock(&lockA, &ts) == 0) {printf("Thread acquired lockA\n");pthread_mutex_unlock(&lockA);return NULL; // 成功获取锁,完成任务} else {retries++;printf("Thread failed to acquire lockA, retrying... (%d/%d)\n", retries, MAX_RETRIES);usleep(RETRY_DELAY); // 暂停一段时间后重试}}// 降级操作:没有锁,也许可以做一些无锁操作printf("Thread failed to acquire lockA after %d retries. Performing a degraded operation.\n", MAX_RETRIES);// 执行简化版的操作,例如使用默认值或不依赖于 lockA 的操作return NULL;
}3. 回退机制如果任务无法在重试中完成,可以设计回退机制,使系统能够在失败后保持一致性。回退机制适用于:
需要状态一致性的系统:如果任务失败会影响系统的状态一致性,回退操作可以恢复到一个已知的安全状态。
长事务:如果任务是长时间操作的一部分,可以通过回滚或恢复到某个检查点来确保任务在失败后能恢复。例如,在数据库操作中,当一个线程因超时无法获取锁时,它可能会通过回滚机制恢复数据库到某个一致的状态。
示例:回退机制(类似数据库事务中的回滚)void rollback() {printf("Rolling back to a consistent state.\n");// 假设执行了一些恢复操作
}void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为2秒int retries = 0;while (retries < MAX_RETRIES) {if (pthread_mutex_timedlock(&lockA, &ts) == 0) {printf("Thread acquired lockA\n");pthread_mutex_unlock(&lockA);return NULL; // 成功获取锁,完成任务} else {retries++;printf("Thread failed to acquire lockA, retrying... (%d/%d)\n", retries, MAX_RETRIES);usleep(RETRY_DELAY); // 暂停一段时间后重试}}// 超过最大重试次数,执行回退操作printf("Thread failed to acquire lockA after %d retries. Rolling back.\n", MAX_RETRIES);rollback();return NULL;
}4. 报警或通知如果任务非常重要且失败后会影响系统的整体行为,可以在超时或失败时报警或通知相关组件(如监控系统、管理员、其他线程等)。这种方式适用于:
高优先级任务:如果任务失败会严重影响系统运行,应该有机制及时通知其他组件或人工介入。
长时间锁定:在多线程环境中,如果某些线程长时间无法获取锁,可能意味着系统有潜在的死锁或资源分配问题,此时报警机制可以帮助及时发现并解决问题。示例:通知管理员或系统void alert_admin(const char* message) {printf("ALERT: %s\n", message);// 实际应用中,可以通过邮件、短信、系统日志等方式通知管理员
}void* thread_func(void* arg) {struct timespec ts;clock_gettime(CLOCK_REALTIME, &ts);ts.tv_sec += 2; // 设置超时时间为2秒int retries = 0;while (retries < MAX_RETRIES) {if (pthread_mutex_timedlock(&lockA, &ts) == 0) {printf("Thread acquired lockA\n");pthread_mutex_unlock(&lockA);return NULL; // 成功获取锁,完成任务} else {retries++;printf("Thread failed to acquire lockA, retrying... (%d/%d)\n", retries, MAX_RETRIES);usleep(RETRY_DELAY); // 暂停一段时间后重试}}// 如果无法获取锁,通知管理员printf("Thread failed to acquire lockA after %d retries. Alerting admin.\n", MAX_RETRIES);alert_admin("Thread failed to acquire lockA after multiple retries.");return NULL;
}5. 记录失败情况并进行系统诊断如果重试失败并且放弃任务不合适,可以记录失败的具体情况,并让系统进行进一步诊断或恢复。记录失败信息可以帮助后续的调试和优化。例如,可以记录锁的状态、系统负载、线程状态等,进一步分析是因为锁竞争过于激烈、资源瓶颈还是设计问题。
总结:如何处理重试失败的情况直接放弃并退出:适用于任务不重要、放弃后不会导致系统不一致的情况。
降级操作:在无法获取锁时,执行一些简化的操作,确保系统仍然能继续工作。
回退机制:如果任务失败影响系统一致性,可以通过回退机制恢复到一个安全的状态。
报警或通知:当任务非常重要或失败可能导致严重后果时,及时报警或通知管理员。
记录失败信息:通过记录失败的详细信息,帮助后续诊断和优化。这些策略可以根据具体应用场景灵活选择,以确保程序在并发
Me
针对我死锁知识点,我理解了吗?
AI
是的,你已经对死锁的知识点有了深入的理解。你详细解释了死锁的定义、必要条件、发生过程,以及如何通过不同的策略来避免死锁。你还讨论了当线程因超时而未能获取锁时的不同处理方法,包括重试机制、回退操作、错误处理和日志记录、资源释放与清理,以及回调或通知机制。这些都是处理死锁和锁竞争中的关键概念和实践。
Me
我的回答结束了,请对我的回答进行评价总结
AI
你的回答显示了对死锁概念和处理策略的深刻理解,以及对多线程同步问题的全面掌握。以下是对你回答的评价和总结:1. **理解深度**:- 你不仅解释了死锁的基本概念和条件,还详细讨论了避免死锁的多种策略,包括锁的获取顺序、超时机制、重试机制等,显示了你对死锁问题深入的理解。2. **实用性**:- 你提供的答案中包含了实用的编程示例,这些示例能够帮助理解理论如何应用于实际编程中,增加了答案的实用性。3. **全面性**:- 你的回答涵盖了死锁的多个方面,从定义到避免策略,再到超时后的处理,全面地讨论了死锁相关的知识点。4. **逻辑性**:- 你的回答逻辑清晰,条理分明,从死锁的定义到避免策略,再到超时处理,每一步都紧密相连,易于理解。5. **沟通能力**:- 你能够清晰地表达复杂的概念,并使用恰当的例子来支持你的解释,这显示了良好的沟通能力。6. **改进建议**:- 尽管你的回答已经非常全面,但在未来的讨论中,可以进一步探讨如何在不同的应用场景中选择和调整这些策略,以及如何平衡性能和资源利用。总体来说,你的回答对于理解和处理死锁问题提供了深刻的见解和实用的指导,对于学习多线程编程和同步机制的人来说是非常有价值的。
学习实践过程遇到的问题与解决方式(AI 驱动,优先使用AI工具解决问题)
问题1,解决过程
问题1
在实现死锁的简单示例中用C语言编写的程序在编译时出现如下错误
编译错误:
fengtairui@fengtairui-virtual-machine:~$ gcc -o sisuo_error sisuo_error.c
sisuo_error.c:8:1: warning: return type defaults to ‘int’ [-Wimplicit-int]8 | thread1_func(void* arg) {| ^~~~~~~~~~~~
sisuo_error.c: In function ‘thread1_func’:
sisuo_error.c:19:12: warning: returning ‘void *’ from a function with return type ‘int’ makes integer from pointer without a cast [-Wint-conversion]19 | return NULL;| ^~~~
sisuo_error.c: In function ‘thread2_func’:
sisuo_error.c:28:25: error: ‘undefined_lock’ undeclared (first use in this function)28 | pthread_mutex_lock(&undefined_lock); // 尝试获取未定义的锁| ^~~~~~~~~~~~~~
sisuo_error.c:28:25: note: each undeclared identifier is reported only once for each function it appears in
sisuo_error.c: In function ‘main’:
sisuo_error.c:42:5: error: too few arguments to function ‘pthread_mutex_init’42 | pthread_mutex_init(&lockB);| ^~~~~~~~~~~~~~~~~~
In file included from sisuo_error.c:2:
/usr/include/pthread.h:781:12: note: declared here781 | extern int pthread_mutex_init (pthread_mutex_t *__mutex,| ^~~~~~~~~~~~~~~~~~
sisuo_error.c:45:36: warning: passing argument 3 of ‘pthread_create’ from incompatible pointer type [-Wincompatible-pointer-types]45 | pthread_create(&thread1, NULL, thread1_func, NULL);| ^~~~~~~~~~~~| || int (*)(void *)
/usr/include/pthread.h:204:36: note: expected ‘void * (*)(void *)’ but argument is of type ‘int (*)(void *)’204 | void *(*__start_routine) (void *),| ~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~
sisuo_error.c:46:5: error: too few arguments to function ‘pthread_create’46 | pthread_create(&thread2, NULL, thread2_func);| ^~~~~~~~~~~~~~
/usr/include/pthread.h:202:12: note: declared here202 | extern int pthread_create (pthread_t *__restrict __newthread,| ^~~~~~~~~~~~~~
有错误的源代码:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lockA, lockB;thread1_func(void* arg) {pthread_mutex_lock(&lockA); // 获取 lockAprintf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockB); // 尝试获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&undefined_lock); // 尝试获取未定义的锁printf("Thread 2 acquired lockA\n");pthread_mutex_unlock(&lockA);pthread_mutex_unlock(&lockB);return NULL;
}int main() {pthread_t thread1, thread2;// 错误3: 错误的函数调用pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB);// 错误4: 错误的线程创建参数pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func);// 等待线程结束pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}
解决过程1
-
错误1:
thread1_func函数缺少返回类型。根据pthread_create函数的定义,线程函数必须返回void*类型。- 解决办法:确保线程函数具有正确的返回类型
void*。
void* thread1_func(void* arg) {// 函数实现 } - 解决办法:确保线程函数具有正确的返回类型
-
错误2:
thread2_func函数中使用了未定义的变量undefined_lock。这将导致编译错误,因为undefined_lock没有在任何地方定义。- 解决办法:确保所有使用的变量都已经定义。在这里,应该使用已定义的锁变量
lockA。
void* thread2_func(void* arg) {pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockA); // 尝试获取 lockAprintf("Thread 2 acquired lockA\n");pthread_mutex_unlock(&lockA);pthread_mutex_unlock(&lockB);return NULL; } - 解决办法:确保所有使用的变量都已经定义。在这里,应该使用已定义的锁变量
-
错误3:
pthread_mutex_init函数的第二个参数应该是指向pthread_mutexattr_t类型的指针。在这里,pthread_mutex_init(&lockB, NULL);缺少了这个参数,将导致编译错误。- 解决办法:确保函数调用时提供了正确的参数。在这里,
pthread_mutex_init函数调用应该包含一个指向pthread_mutexattr_t的指针作为第二个参数,如果不需要特定的属性,可以使用NULL。
pthread_mutex_init(&lockA, NULL); pthread_mutex_init(&lockB, NULL); - 解决办法:确保函数调用时提供了正确的参数。在这里,
-
错误4:
pthread_create函数的最后一个参数应该是void*类型的。在这里,pthread_create(&thread2, NULL, thread2_func);缺少了这个参数,将导致编译错误。- 解决办法:确保
pthread_create函数的最后一个参数是正确的,它应该是一个指向函数的指针,该函数接受一个void*参数并返回一个void*值。
pthread_create(&thread1, NULL, thread1_func, NULL); pthread_create(&thread2, NULL, thread2_func, NULL); - 解决办法:确保
正确代码:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lockA, lockB;void* thread1_func(void* arg) {pthread_mutex_lock(&lockA); // 获取 lockAprintf("Thread 1 acquired lockA\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockB); // 尝试获取 lockBprintf("Thread 1 acquired lockB\n");pthread_mutex_unlock(&lockB);pthread_mutex_unlock(&lockA);return NULL;
}void* thread2_func(void* arg) {pthread_mutex_lock(&lockB); // 获取 lockBprintf("Thread 2 acquired lockB\n");sleep(1); // 模拟一些操作pthread_mutex_lock(&lockA); // 尝试获取 lockAprintf("Thread 2 acquired lockA\n");pthread_mutex_unlock(&lockA);pthread_mutex_unlock(&lockB);return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lockA, NULL);pthread_mutex_init(&lockB, NULL);// 创建线程pthread_create(&thread1, NULL, thread1_func, NULL);pthread_create(&thread2, NULL, thread2_func, NULL);// 等待线程结束pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lockA);pthread_mutex_destroy(&lockB);return 0;
}
运行结果:
engtairui@fengtairui-virtual-machine:~$ touch sisuo.c
fengtairui@fengtairui-virtual-machine:~$ vim sisuo.c
fengtairui@fengtairui-virtual-machine:~$ gcc -o sisuo sisuo.c
fengtairui@fengtairui-virtual-machine:~$ ./sisuo
Thread 1 acquired lockA
Thread 2 acquired lockB
^C
fengtairui@fengtairui-virtual-machine:~$
问题2,解决过程
问题2
在实现互斥锁的简单示例中用C语言编写的程序在编译时出现如下错误
编译错误:
fengtairui@fengtairui-virtual-machine:~$ gcc -o huchisuo_error huchisuo_error.c
huchisuo_error.c: In function ‘main’:
huchisuo_error.c:25:5: error: too few arguments to function ‘pthread_create’25 | pthread_create(&thread2, NULL, increment); | ^~~~~~~~~~~~~~
In file included from huchisuo_error.c:2:
/usr/include/pthread.h:202:12: note: declared here202 | extern int pthread_create (pthread_t *__restrict __newthread,| ^~~~~~~~~~~~~~
有错误的源代码:
#include <stdio.h>
#include <pthread.h>pthread_mutex_t lock; // 定义一个互斥锁
int counter = 0; // 共享资源// 线程函数:增加计数器
void* increment(void* arg) {for (int i = 0; i < 1000000; i++) {pthread_mutex_lock(&lock); // 加锁,开始访问共享资源counter++; // 共享资源修改pthread_mutex_unlock(&lock); // 解锁,释放资源}return NULL;
}int main() {pthread_t thread1, thread2;// 初始化互斥锁pthread_mutex_init(&lock, NULL);// 创建两个线程pthread_create(&thread1, NULL, increment, NULL);pthread_create(&thread2, NULL, increment); // 等待线程完成pthread_join(thread1, NULL);pthread_join(thread2, NULL);// 销毁互斥锁pthread_mutex_destroy(&lock);// 打印最终的计数器值printf("Final counter value: %d\n", counter);return 0;
}
解决过程2
-
错误1: 缺少头文件
<unistd.h>- 解决办法:添加
<unistd.h>头文件,因为sleep函数需要此头文件。
#include <unistd.h> - 解决办法:添加
-
错误2:
pthread_create函数调用缺少参数- 解决办法:为
pthread_create函数提供所有必要的参数。
pthread_create(&thread2, NULL, increment, NULL); - 解决办法:为
-
错误3:
counter变量未声明为volatile- 解决办法:在多线程环境中,如果多个线程访问同一个变量,应该将其声明为
volatile,以防止编译器优化导致的问题。
volatile int counter = 0; - 解决办法:在多线程环境中,如果多个线程访问同一个变量,应该将其声明为
-
错误4:
pthread_mutex_lock和pthread_mutex_unlock可能返回错误,但没有检查返回值- 解决办法:检查
pthread_mutex_lock和pthread_mutex_unlock的返回值,并处理可能的错误。
if (pthread_mutex_lock(&lock) != 0) {perror("Failed to lock mutex");return NULL; } // ... if (pthread_mutex_unlock(&lock) != 0) {perror("Failed to unlock mutex"); } - 解决办法:检查
-
错误5:
increment函数的返回类型应该是void而不是void\*- 解决办法:将
increment函数的返回类型改为void。
void increment(void* arg) {// 函数实现 } - 解决办法:将
正确代码:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>pthread_mutex_t lock; // 定义一个互斥锁
volatile int counter = 0; // 共享资源// 线程函数:增加计数器
void increment(void* arg) {for (int i = 0; i < 1000000; i++) {if (pthread_mutex_lock(&lock) != 0) {perror("Failed to lock mutex");return;}counter++; // 共享资源修改if (pthread_mutex_unlock(&lock) != 0) {perror("Failed to unlock mutex");}}
}int main() {pthread_t thread1, thread2;// 初始化互斥锁if (pthread_mutex_init(&lock, NULL) != 0) {perror("Failed to initialize mutex");return 1;}// 创建两个线程if (pthread_create(&thread1, NULL, increment, NULL) != 0) {perror("Failed to create thread 1");return 1;}if (pthread_create(&thread2, NULL, increment, NULL) != 0) {perror("Failed to create thread 2");return 1;}// 等待线程完成if (pthread_join(thread1, NULL) != 0) {perror("Failed to join thread 1");}if (pthread_join(thread2, NULL) != 0) {perror("Failed to join thread 2");}// 销毁互斥锁if (pthread_mutex_destroy(&lock) != 0) {perror("Failed to destroy mutex");}// 打印最终的计数器值printf("Final counter value: %d\n", counter);return 0;
}
运行结果:
fengtairui@fengtairui-virtual-machine:~$ touch huchisuo.c
fengtairui@fengtairui-virtual-machine:~$ vim huchisuo.c
fengtairui@fengtairui-virtual-machine:~$ gcc -o huchisuo huchisuo.c
fengtairui@fengtairui-virtual-machine:~$ ./huchisuo
Final counter value: 2000000
参考资料
- AI工具(你使用的AI工具及其链接)
- Kimi
- 秘塔搜索
- 图书
- Head First C 嗨翻C语言
- 网站
- CSDN博客-专业IT技术发表平台
- 博客园 - 开发者的网上家园