本文深入浅出地介绍了3D游戏开发中常用的旋转工具——欧拉角和四元数。通过生动的例子和代码演示,详细解释了它们的基本概念、应用场景以及如何解决万向锁、插值和计算效率等问题。无论你是初学者还是有经验的开发者,都能从中获得实用的知识和技巧……
本文深入浅出地介绍了3D游戏开发中常用的旋转工具——欧拉角和四元数。通过生动的例子和代码演示,详细解释了它们的基本概念、应用场景以及如何解决万向锁、插值和计算效率等问题。无论你是初学者还是有经验的开发者,都能从中获得实用的知识和技巧……春节期间,老牛同学学习使用 Cocos Creator 研发了一款 3D 小游戏。开发过程中遇到了一些全新概念和用法,虽然借助大模型最终完成了小游戏功能的开发,但对这些概念却一知半解。
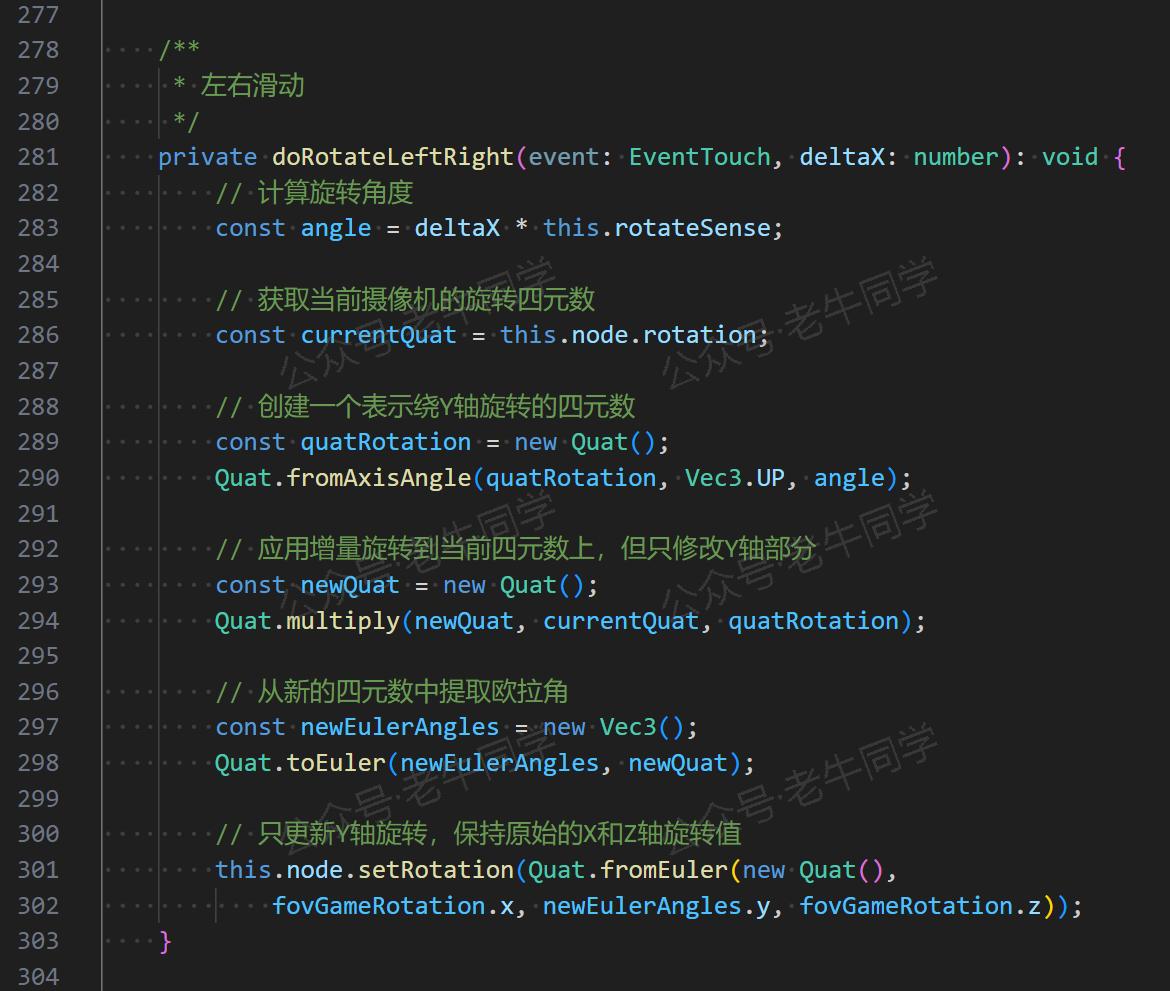
其中,在需要 3D 组件旋转的功能中,“欧拉角”和“四元数”就是研发过程中遇到的一个全新的概念。如下代码是大模型帮忙实现的“左右水平滑动”功能:
本文将对“欧拉角”和“四元数”进行尽可能详细的总结,尽可能不涉及数学证明公式,希望能给像我一样有困惑的朋友一些帮助:
- 基本概念:为什么对于 3D 物体旋转,大家都采用欧拉角和四元数来表示?为什么 1 个概念还不够,还需要 2 个?他们分别解决什么主要问题?
- 如何应用:在不同场景下,欧拉角和四元数如何应用旋转?它们如何应用到物体旋转?
- 实际应用:最后,用一个“让立方体的对角线垂直于地面并旋转”功能,演示如何让物体旋转后并不停的旋转起来。
本文代码和小游戏源代码均可免费下载:打开“老牛同学”微信小程序->点击“更多”Tab->“源代码”获取下载链接。

欧拉角和四元数存在的意义是什么?
首先,欧拉角和四元数都是用于描述三维空间中物体旋转的常用工具,它们只是工具,核心就是三维和旋转。
欧拉角最早由瑞士数学家莱昂哈德·欧拉(Leonhard Euler)于 18 世纪提出,他认为:三维空间中物体的任意姿态,都可以通过三个连续的旋转角度来描述(即:第一步绕某个轴旋转,第二步绕另一个轴旋转,第三步绕第三个轴旋转)。用 3 个数就可以表示旋转姿态,确实一种非常直观且易于理解的方法。
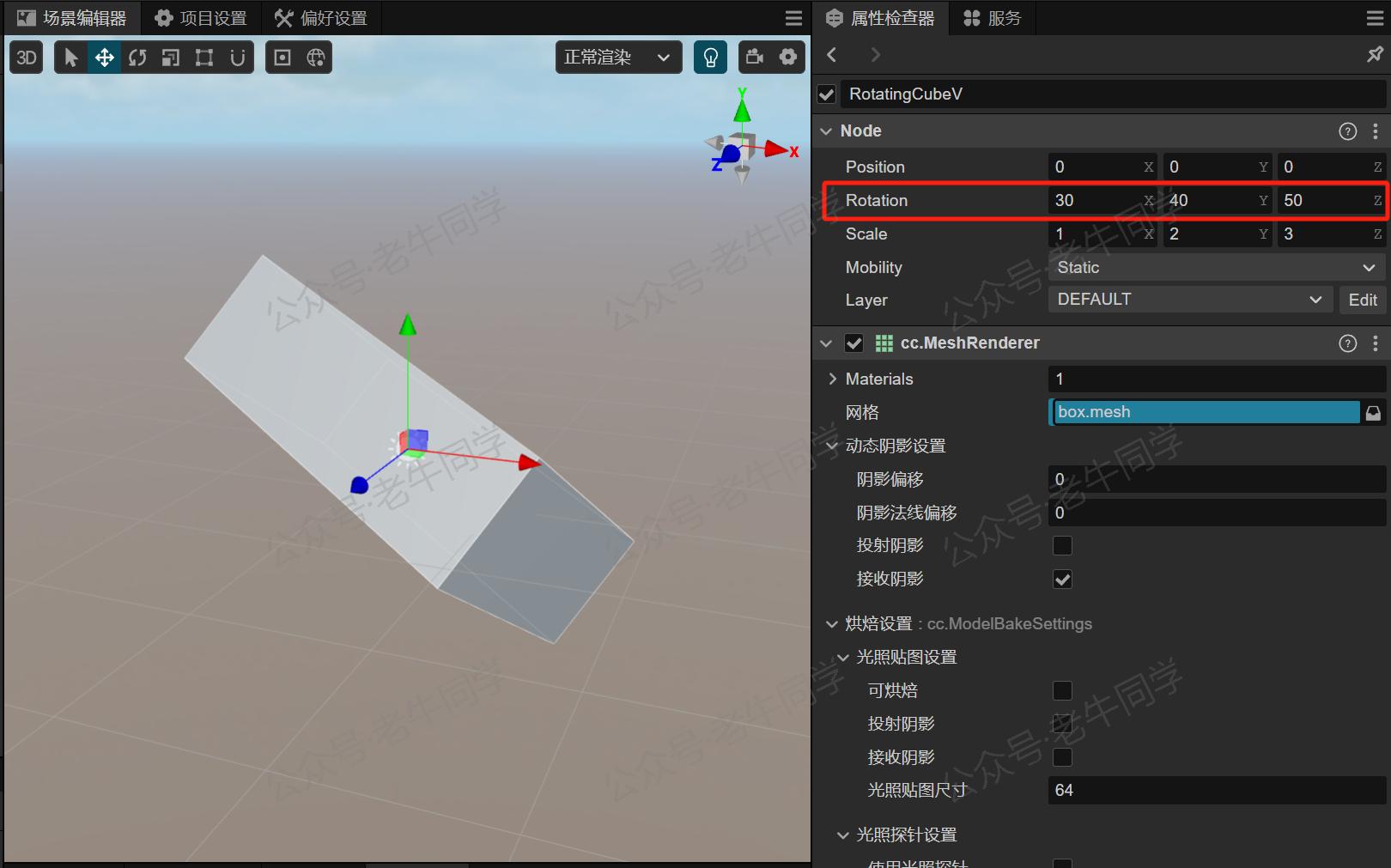
那么,对应到游戏开发中,欧拉角的就是我们最常见的X 轴、Y 轴和Z 轴旋转属性来表示了。如下所示,把一个长方体按照 X/Y/Z 旋转后的姿态:
注意的是,在三维空间中,我们一般用姿态或位姿来表示物体的当前旋转,它有两层含义:
- 物体方向,或者朝向
- 物体局部坐标系相当于世界坐标系的偏移量
四元数由爱尔兰数学家威廉·罗文·汉密尔顿(William Rowan Hamilton)于 1843 年提出。汉密尔顿希望找到一种用于描述三维空间旋转的数系。据说,汉密尔顿有一次在散步时突然想到了四元数的基本公式,并将其刻在了一座桥上。
四元数由一个实部和三个虚部组成,形式为:Q = W + Xi + Yj + Zk,其中W,X,Y,Z是实数,i,j,k是虚数单位。
既然欧拉角表示旋转已经足够优秀了,为什么还需要引入四元数呢?
原因在于,欧拉角虽然简单直观,但存在三个问题:万向锁问题(Gimbal Lock)、旋转过程中插值困难、计算效率较低的问题。
接下来,老牛同学根据自己的理解,逐一介绍欧拉角的这几个问题,同时看看四元数是如何解决的。
什么是旋转,什么是坐标系?
在介绍欧拉角和四元数之前,先了解一下旋转和坐标系。
旋转是指物体在三维空间中绕某个轴进行角度变化的运动:
- 轴:在三维空间中,我们一般 X 轴、Y 轴和 Z 轴表示。
- 角度:通常用角度或弧度来表示。
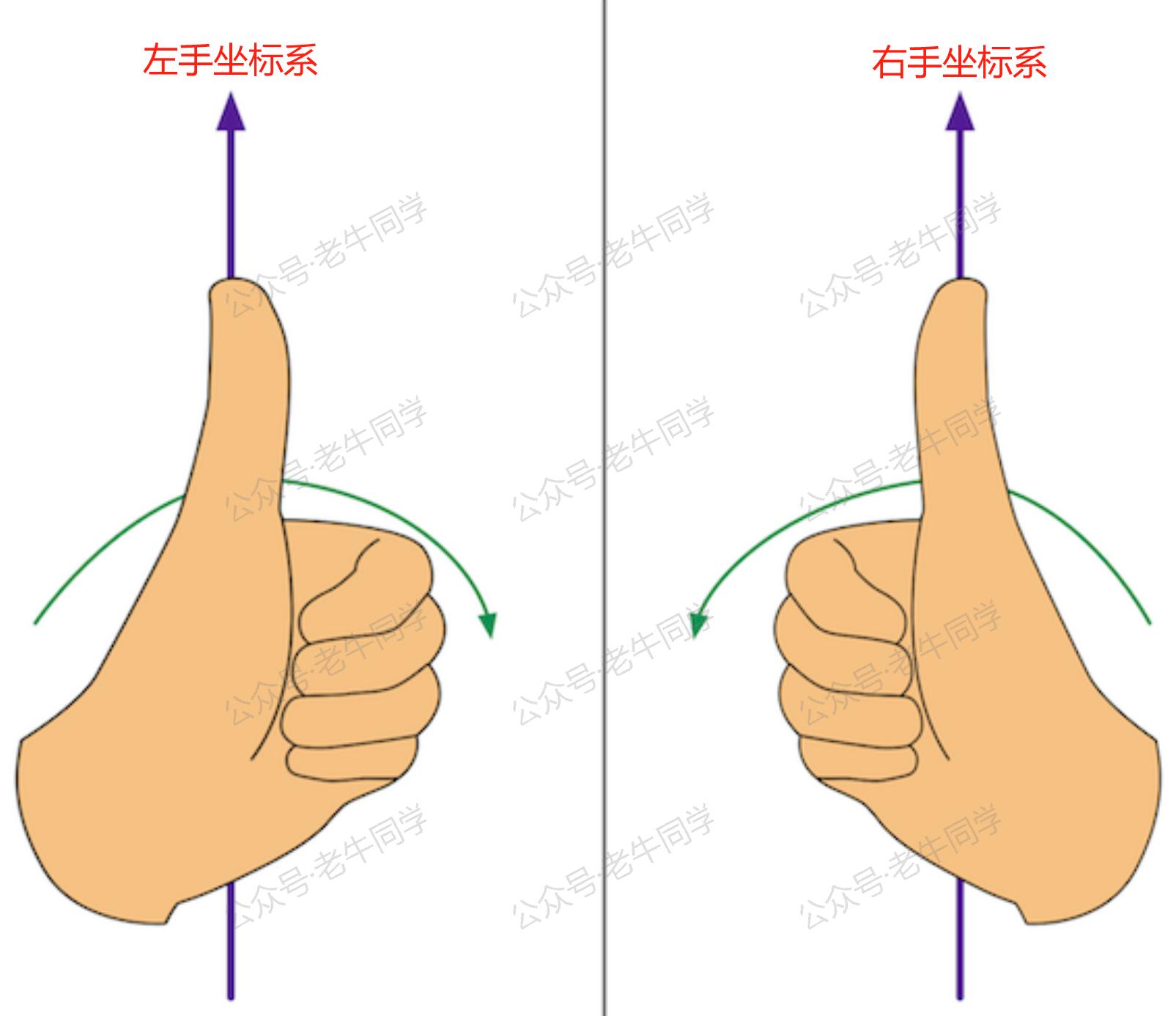
- 运动方向:分为右手坐标系或者左手坐标系。Cocos 3D 使用右手坐标系,Unity 3D 使用左手坐标系。默认情况下,轴默认配置:X 轴向右为正,Y 轴 向上为正,Z 轴朝屏幕外为正。
右手坐标系旋转方向:伸出右手,大拇指指向轴的正方向(如:围绕 X 轴旋转+30°,则大拇指指向 X 轴的正方向);弯曲四指,四指弯曲的方向为旋转正方向(如:+30°),反过来手背方向便是负方向。
左手坐标系旋转方向:类似于右手坐标系,伸出左手即可。
世界坐标系: 三维空间的参考框架,所有物体的参考标准,它是固定不变的。
本地坐标系: 每个物体都有的自己的坐标系,用于描述其自身的姿态。
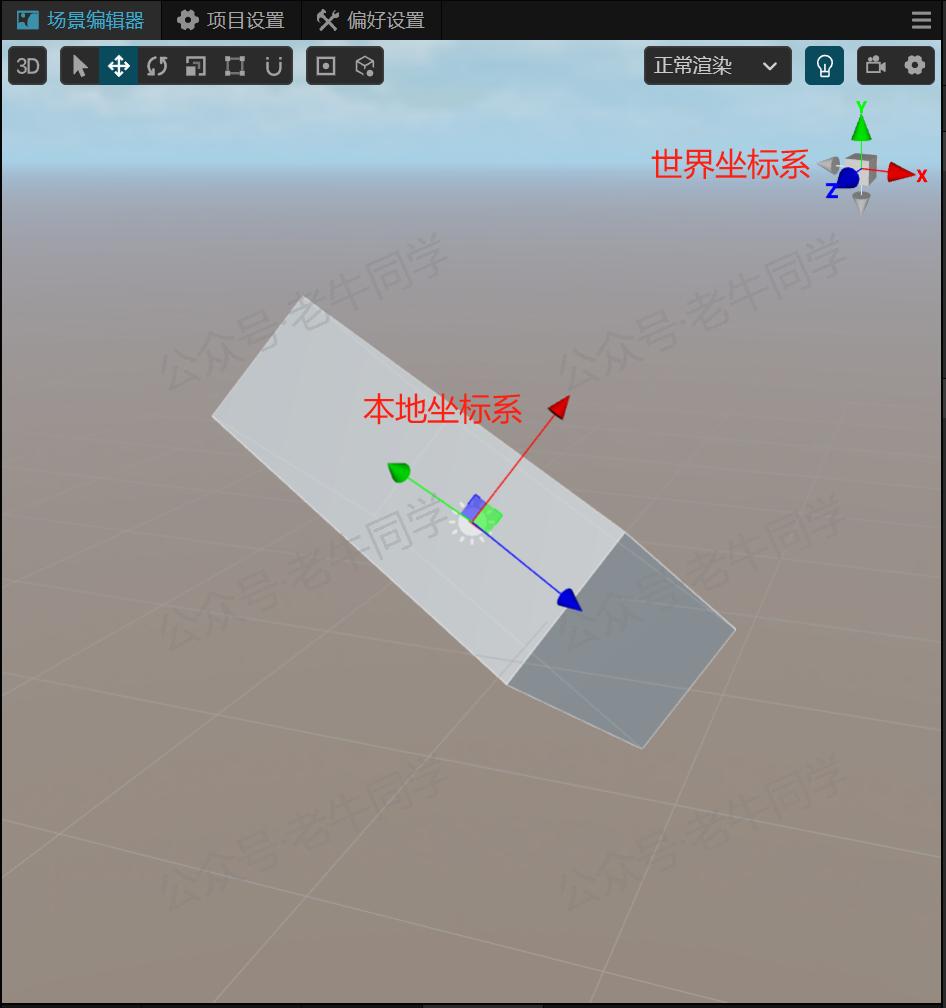
一般情况下,我们所说的旋转指的是局部坐标系,当然也可以相对于全局坐标系。
万向锁问题和解法
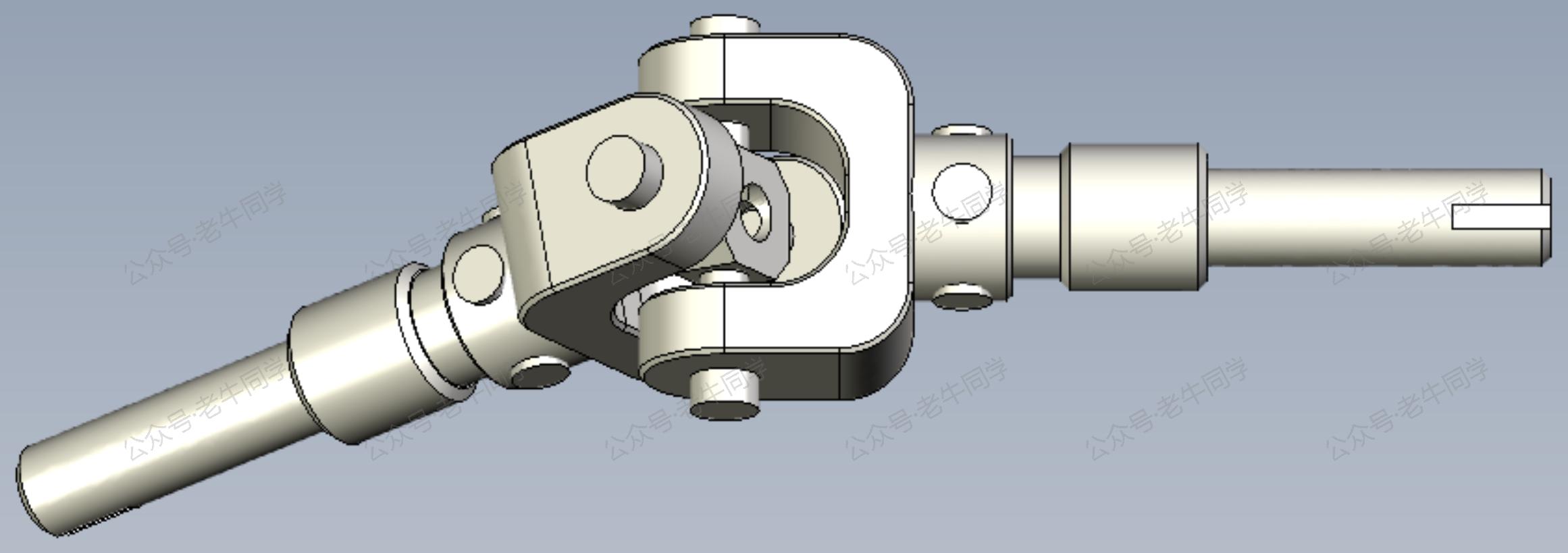
万向节常用在汽车动力传输上,它是汽车驱动系统关节,它可以围绕不同方向旋转:
在解释万向锁问题之前,有三个非常重要的概念必须理解:
- 无论是欧拉角还是四元数,它们表示的是物体旋转后的姿态,是一个描述,它不是一个连续的动作。比如:欧拉角
(90,0,0)代表围绕 X 轴旋转+90°,它表示的是这个物体旋转+90° 后的姿态,而不是表示物体围绕 X 轴,从 0°->1°->2°->……->90° 这个过程。因此,这里的“旋转”它不是指一个连续的动作! - 物体姿态与旋转的顺序密切相关,相同的角度,不同的旋转顺序,物体的姿态是不相同的。我们可以拿个快递盒子,做个简单的实验就能明白。如:围绕 X 轴旋转 90°,Y 轴 45°,X→Y→Z旋转顺序,和Y→X→Z旋转顺序,快递盒子的姿态是不同的。
- 物体按照某个顺序依次旋转,前面的轴旋转时,会带动后面的轴一同旋转,而后面轴旋转却不会影响前面的轴。如:X→Y→Z 旋转顺序,当围绕 X 轴旋转时,本地坐标系 Y 轴和 Z 轴一同旋转;当围绕 Y 轴旋转时,Z 轴会一同旋转,但 X 轴是不动的;最后,当围绕 Z 轴旋转时,X 轴和 Y 轴都不会动!
第 3 点感觉非常的诡异,老牛同学就被这个不可思议的概念折磨了好久,直到彻底理解了第 1 点:永远记住,欧拉角和四元数这些表示旋转的工具,它们只是描述旋转后的姿态,并不是旋转动作(旋转在这里当名称理解),它没有动作过程,只是最终的瞬时的姿态!
如果大家理解了第 1 点,那么可以退一步想:X→Y→Z 旋转顺序,如果围绕 Y 轴旋转时,X 轴也跟着旋转,那么 X 轴最初的旋转不就白费了吗?
如果第 3 点无法理解的话,那么万向锁的问题是无法理解,因为它就是万向锁产生的前提!
至此,大家也可以到网上看看数学推导公式,在此老牛同学就不列举了!
万向锁定义:当两个旋转轴重合时,原本三个独立的旋转轴(X、Y、Z)变成了两个,导致自由度减少的现象。
我们先来看看,万向锁发生的场景:物体的任意旋转顺序(如:X→Y→Z,Y→X→Z 等),当围绕第 2 个轴旋转的角度为 ±90° 时,那么第 3 个轴就会和第 1 个轴就会重合。这样当物体围绕第 1 个轴旋转或者第 3 个轴旋转,姿态都是一样的,无法区分,这种现象就是“万向锁”问题。
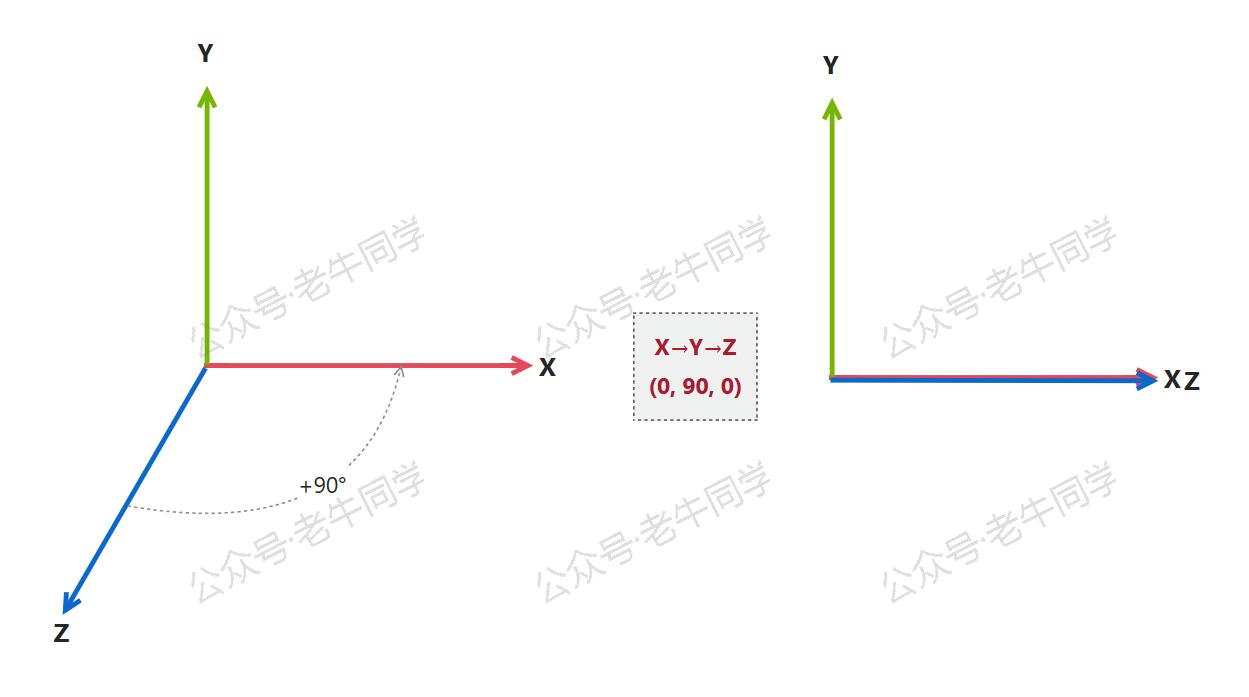
如上图所示:X→Y→Z 旋转顺序,(0, 90, 0)旋转角度(X 轴和 Z 轴角度可以是任意值,此处便于理解设置为 0°),当围绕 Y 轴旋转 90° 之后,X 轴和 Z 轴重合了。这个时候,物体无论围绕 X 轴还是 Z 轴旋转,姿态都是一样的。
那么,四元数是如何解决欧拉角万向锁问题的呢:由上述公式可以看出,它没有旋转轴的概念,而是由四个数值表示旋转,表示方式为cos(θ/2)+sin(θ/2)(xi+yj+zk);其中,θ 代表旋转的角度,(x,y,z)代表旋转轴方向。
插值和计算效率问题
插值问题的理解:插值是指物体旋转路径上的中间状态(即平滑过渡),欧拉角使用三个角度描述旋转,容易出现冗余或等效旋转的问题(如:(0, 0, 0)和(360, 360, 360)),导致旋转路径不自然,当发生万向锁问题的时候,就会发生异常。而四元数,它支持球面线性插值方法,能够生成平滑且自然的、稳定的旋转。
// 插值比例
const t = 0.5;// 1. 欧拉角线性插值
const startEuler = new Vec3(0, 0, 0);
const endEuler = new Vec3(90, 45, 0);const interpolatedEuler = new Vec3(startEuler.x + (endEuler.x - startEuler.x) * t,startEuler.y + (endEuler.y - startEuler.y) * t,startEuler.z + (endEuler.z - startEuler.z) * t
);console.log(`欧拉角线性插值: ${interpolatedEuler}`);// 2. 四元数球面线性插值
const startQuat = new Quat();
const endQuat = new Quat();Quat.fromEuler(startQuat, 0, 0, 0);
Quat.fromEuler(endQuat, 90, 45, 0);const interpolatedQuat = new Quat();
Quat.slerp(interpolatedQuat, startQuat, endQuat, t);console.log(`四元数球面线性插值: (${interpolatedQuat.w}, ${interpolatedQuat.x}, ${interpolatedQuat.y}, ${interpolatedQuat.z})`);
计算效率问题:主要是运算复杂度高,涉及大量的三角函数运算,计算效率比较低。而四元数,可通过简单的向量点积和叉积实现计算,计算效率较高。
欧拉角和四元数转换
在 Cocos 3D 中,欧拉角的使用简单且直观,使用Vec3对象表示:
// 1. 获取欧拉角(单位:度)
const euler: Vec3 = this.node.eulerAngles;
console.log(`X: ${euler.x}°`);
console.log(`Y: ${euler.y}°`);
console.log(`Z: ${euler.z}°`);// 2. 设置欧拉角(X/Y/Z,单位:度)
this.node.eulerAngles = new Vec3(45, 30, 15);
四元数使用Quat对象表示:
// 3. 获取四元数
const quat1: Quat = this.node.getRotation();
console.log(`四元数 w: ${quat1.w}, x: ${quat1.x}, y: ${quat1.y}, z: ${quat1.z}`);// 4. 设置四元数(w, x, y, z)
const quat2 = new Quat(0.707, 0, 0, 0.707);
this.node.setRotation(quat2);
欧拉角和四元数,也可以相互转换:
// 5. 欧拉角转四元数
const quat3 = new Quat();
Quat.fromEuler(quat3, euler.x, euler.y, euler.z);
console.log(`欧拉角转四元数 w: ${quat3.w}, x: ${quat3.x}, y: ${quat3.y}, z: ${quat3.z}`);// 6. 四元数转欧拉角
Quat.toEuler(euler, quat2);
console.log(`四元数转欧拉角: X=${euler.x}°, Y=${euler.y}°, Z=${euler.z}°`);
实战:垂直地面旋转立方体
接下来,我们来一个应用实战:旋转立方体,让对角线垂直于地面,然后围绕对角线不停地旋转!

让立方体的对角线垂直于地面,用欧拉角很难表示。从代码中可以看到,用四元数可以轻松实现。
首先,让立方体的对角线垂直于地面立起来:
/*** 初始化:立起来*/
protected start(): void {// 立方体对角线顶点向量const scale: number = this.node.scale.x;const localDiagonal = new Vec3(scale, scale, scale);// 归一化Vec3.normalize(localDiagonal, localDiagonal);// 本地对角线旋转到Y轴的旋转const targetDirection = new Vec3(0, 1, 0);const rotation = new Quat();Quat.rotationTo(rotation, localDiagonal, targetDirection);// 应用旋转,立起来this.node.setRotation(rotation);
}
然后,让立方体按照指定的弧度参数,沿着世界坐标系 Y 轴进行旋转(因为第一次旋转之后,立方体的本地坐标系已经发生了变化,但是世界坐标系是固定不变):
/*** 帧更新:旋转*/protected update(dt: number): void {const rotation = new Quat();Quat.fromAxisAngle(rotation, Vec3.UNIT_Y, this.rotateSpeed);this.node.rotate(rotation, Node.NodeSpace.WORLD);}
最后,简单总结
从上面分析我们可以看到,欧拉角和四元数这 2 个表示三维空间物体旋转的工具,它们有各自的使用场景:
- 欧拉角:直观,便于理解;在属性编辑器等调试场景,用欧拉角旋转;同时,对于简单的旋转操作(如:单一轴旋转),使用欧拉角就非常方便。
- 四元数:转换复杂,不直观;但它插值平滑,计算效率高,比较适合复杂的旋转场景。
欧拉角这么好,那如何克服“万向锁”问题:把旋转顺序的第二个轴(如:X→Y→Z 旋转顺序的 Y 轴),设置为不太容易旋转+90° 的轴。如在 Cocos 3D 等游戏研发中,Y 轴是第二个轴,它垂直于地面,因为在游戏过程中,摄像头一般都不会垂直于地面或者垂直于天空。
提示: 以上示例源代码,老牛同学已经上传,打开“老牛同学”微信小程序->点击“更多”Tab->“源代码”获取下载链接。
Cocos 3D 小游戏:
01.技术选型 丨 02.研发流程 丨 03.小游戏框架丨 04.核心架构设计丨 05.分包构建发布
Transformers 框架序列:
01.包和对象加载中的设计巧思与实用技巧
02.AutoModel 初始化及 Qwen2.5 模型加载全流程
03.Qwen2.5 大模型的 AutoTokenizer 技术细节
04.Qwen2.5/GPT 分词流程与 BPE 分词算法技术细节详解
05.嵌入(Embedding)机制和 Word2Vec 实战
06.位置嵌入(Positional Embedding)
Pipeline NLP 任务序列:
零·概述 丨 01.文本转音频 丨 02.文本分类 丨 03.词元分类和命名实体识别 丨 04.问答 丨 05.表格问答 | 06.填充蒙版
往期推荐文章:
Cline 免费插件 + Qwen2.5 大模型,零经验也能开发“对联王”微信小程序
使用 Cursor + Qwen2.5 大模型 零经验研发微信小程序:自由构建个性化节拍器应用实战
Bolt.new 用一句话快速构建全栈应用:本地部署与应用实战(Ollama/Qwen2.5 等)
基于 Qwen2.5-Coder 模型和 CrewAI 多智能体框架,实现智能编程系统的实战教程
vLLM CPU 和 GPU 模式署和推理 Qwen2 等大语言模型详细教程
基于 Qwen2/Lllama3 等大模型,部署团队私有化 RAG 知识库系统的详细教程(Docker+AnythingLLM)
使用 Llama3/Qwen2 等开源大模型,部署团队私有化 Code Copilot 和使用教程
基于 Qwen2 大模型微调技术详细教程(LoRA 参数高效微调和 SwanLab 可视化监控)
ChatTTS 长音频合成和本地部署 2 种方式,让你的“儿童绘本”发声的实战教程


![[AI/前沿展望/综述] AI大模型的技术生态链全景图](https://blog-static.cnblogs.com/files/johnnyzen/cnblogs-qq-group-qrcode.gif?t=1679679148)