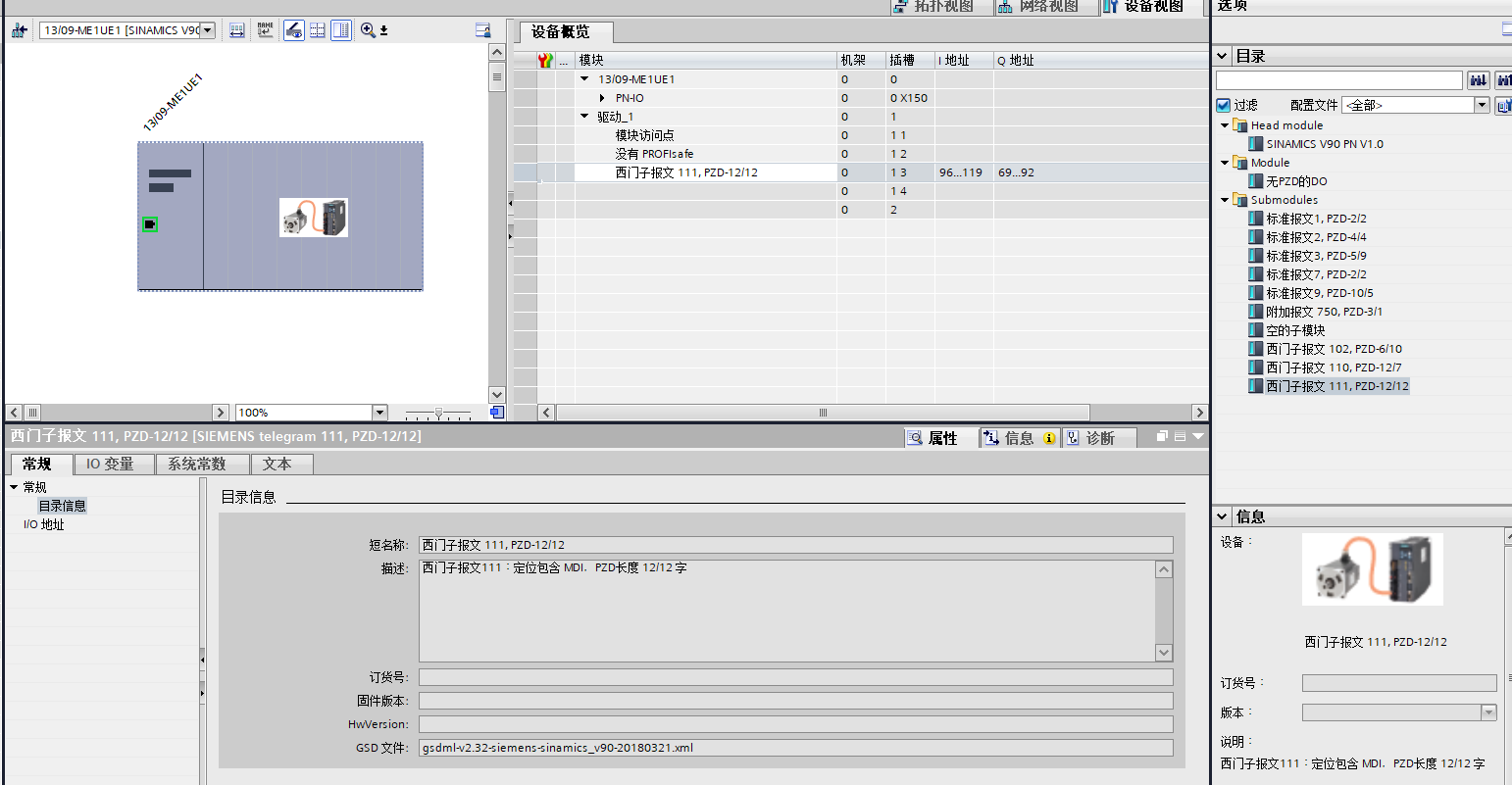
硬件组态
- 选择西门子报文111
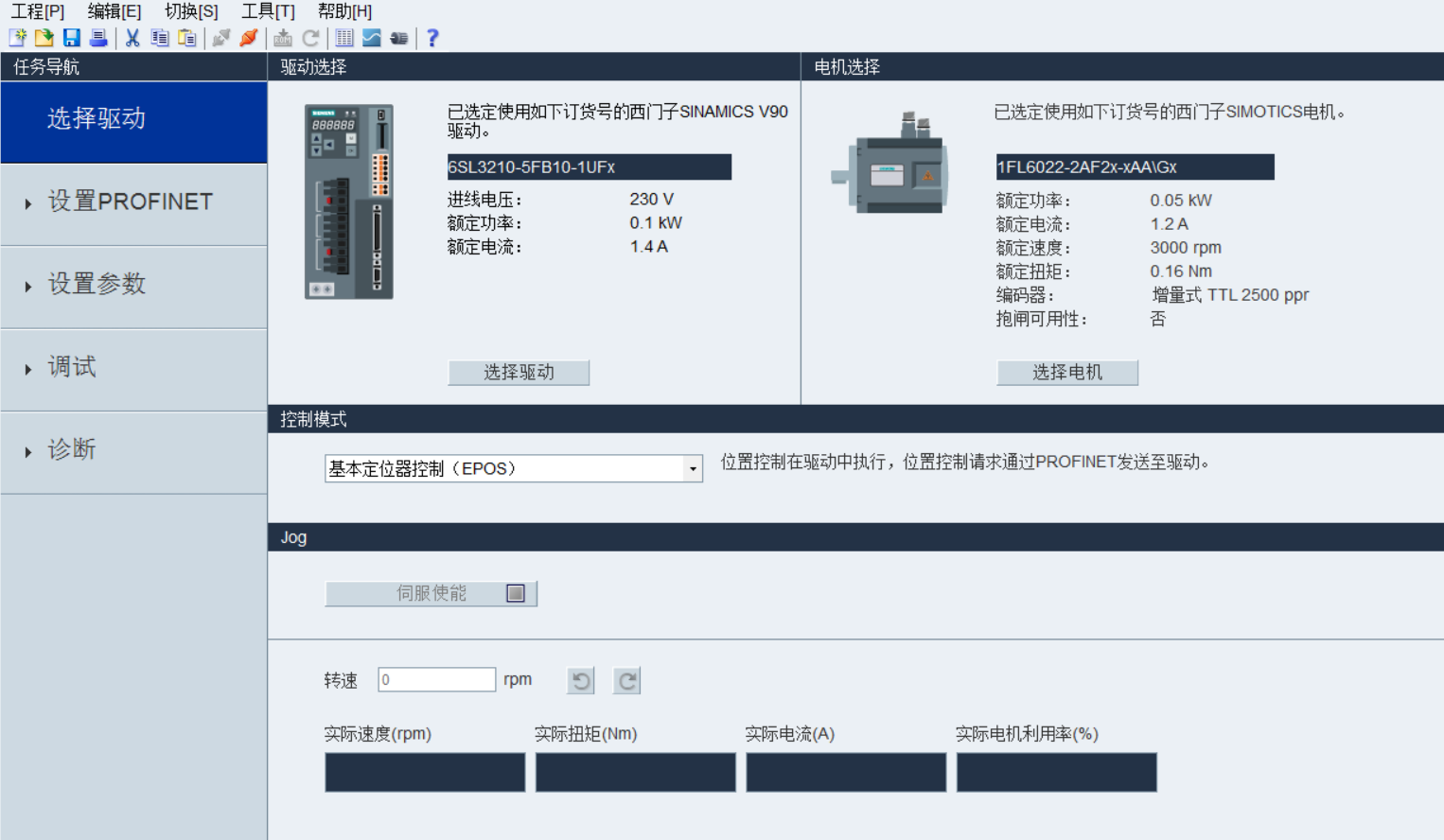
V-ASSISTANT的设置
- 选择EPOS
- 选111报文

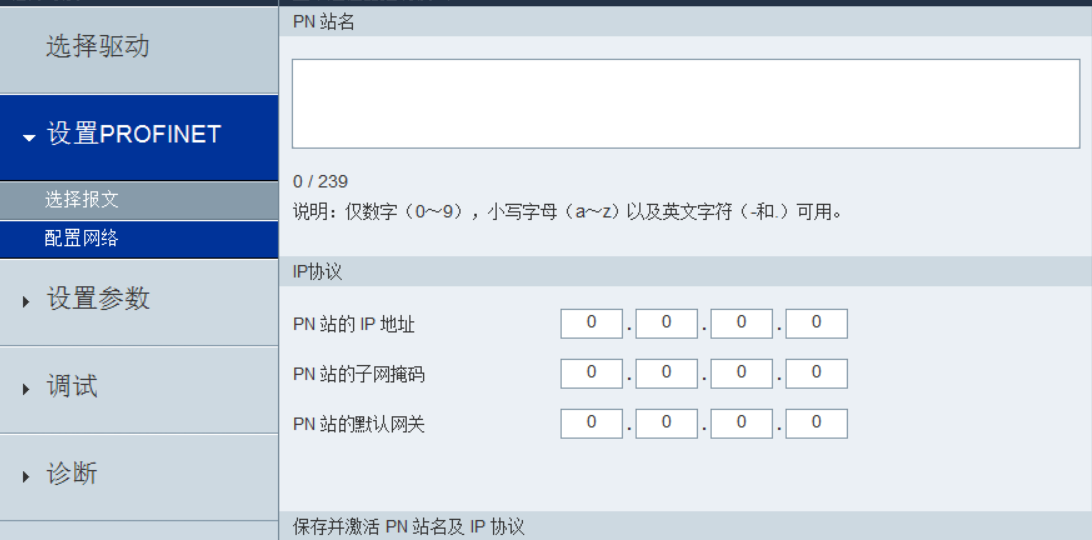
- 设置IP
- 设置减速比

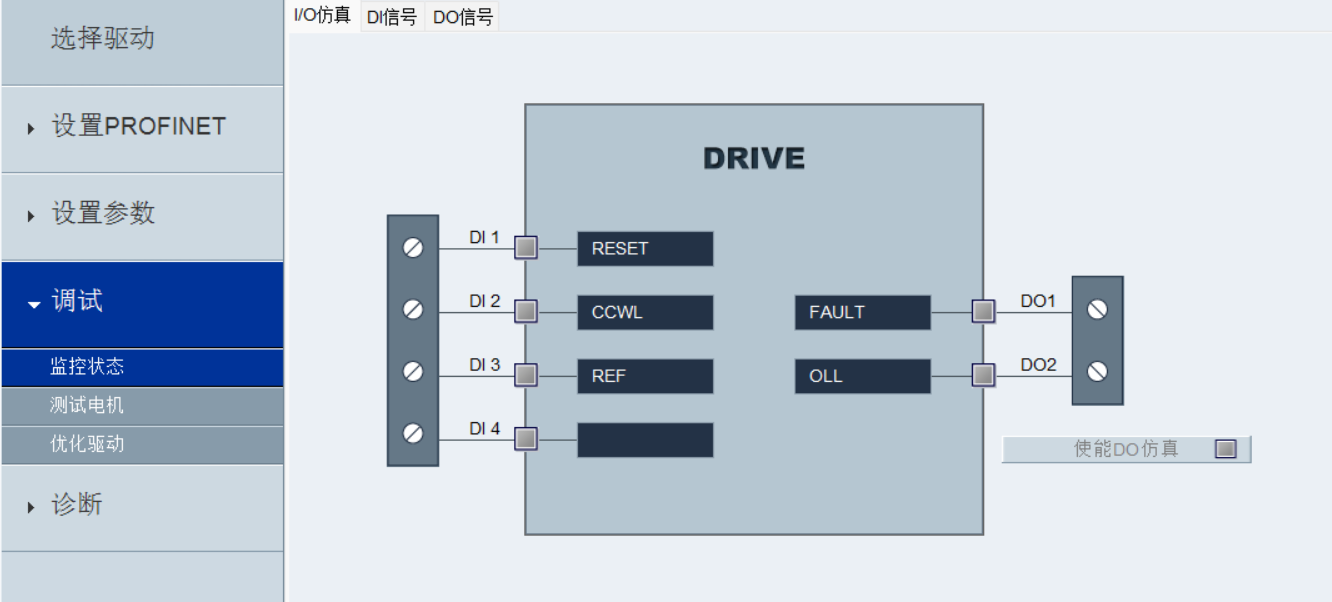
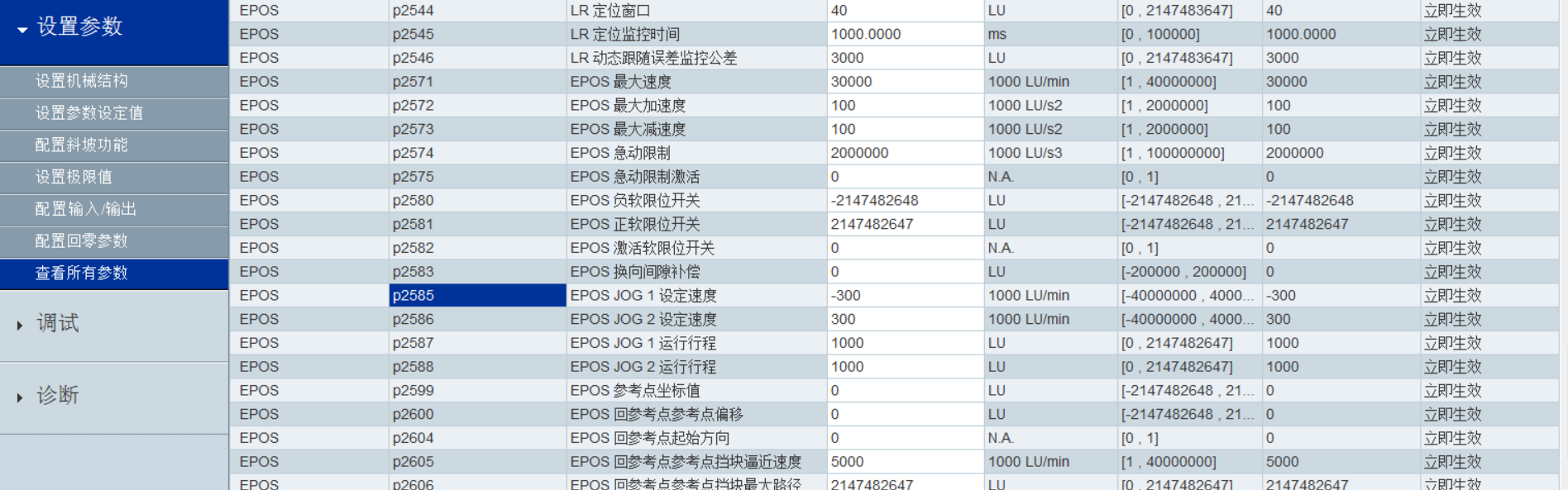
- 设置限位及原点传感器
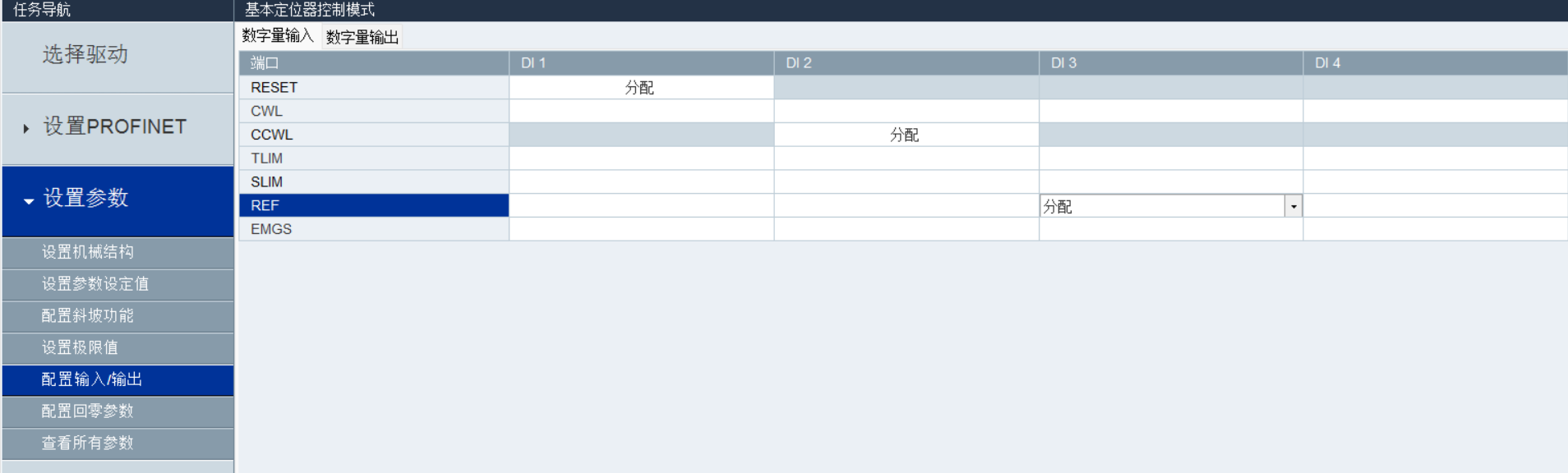
- 设置控制字以启用输入输出

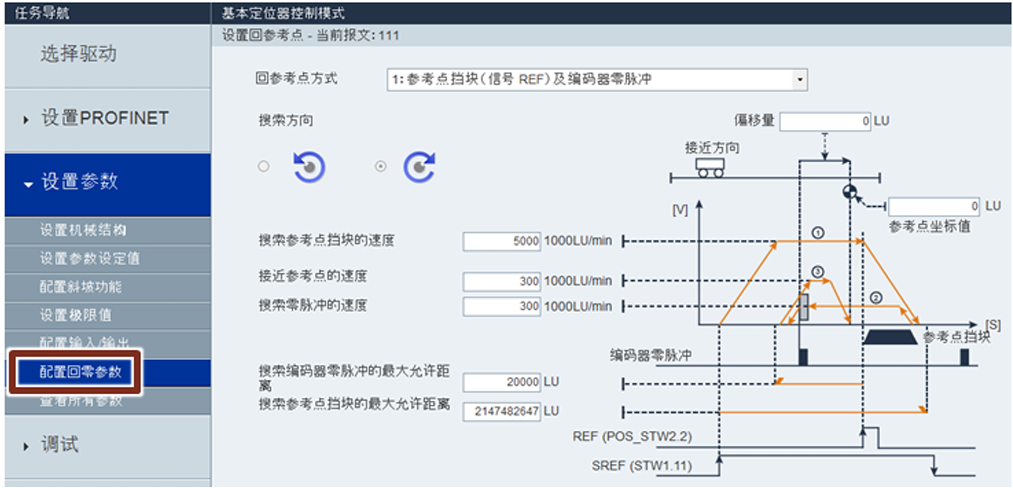
- 设置回零参数
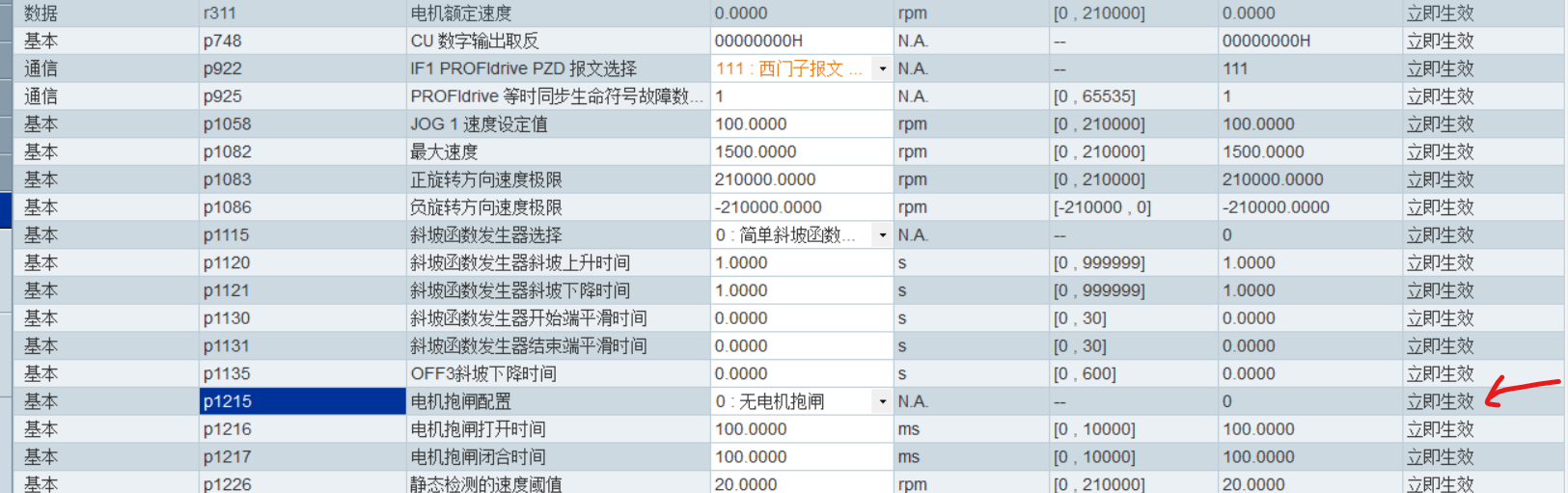
- 电机抱闸设置
- 在线检查
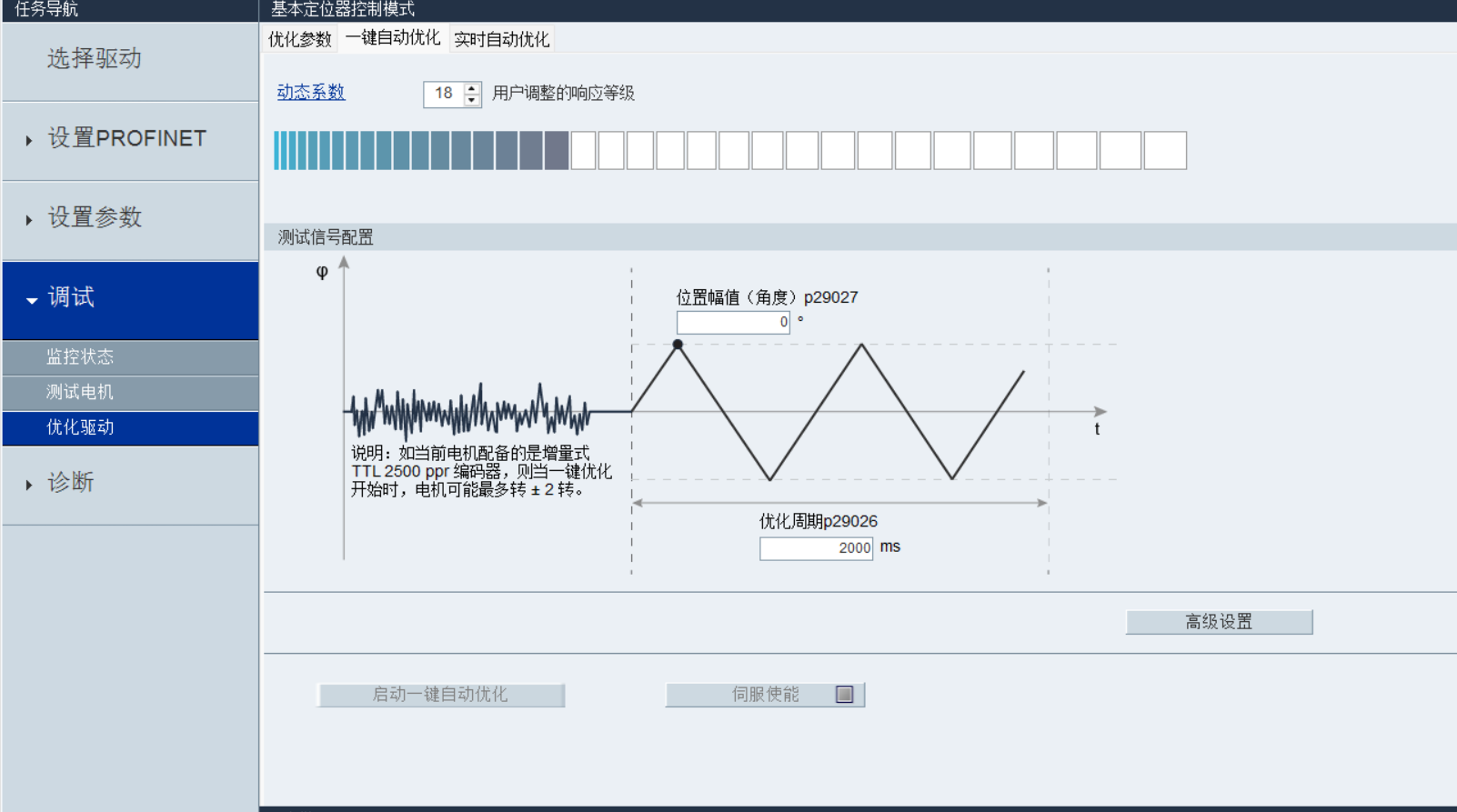
- 设置完毕后,自动优化电机
- 设置点动速度的控制字
- 电机监控和诊断状态字

- 参数保存后需重启驱动器才能生效。
- LU单位和长度的对应关系:需要设置正确的齿轮比,以及设置负载转动一圈物体移动距离所对应的长度单位(LU)。如果定义1LU对应0.001mm,负载转动一圈移动10mm,则此时负载转动一圈对应的长度单位为10000LU。
程序设置
#FB_SINA_POS_Instance(ModePos := #Servo.ModePos,//2绝对定位 4回零 7点动EnableAxis := #Servo.EnableAxis,//使能CancelTraversing := #Servo.CancelTraversing,//0 = 拒绝激活的运行任务 1 = 不拒绝(停止)IntermediateStop := #Servo.IntermediateStop,//中间停止:0 = 中间停止运行任务 1 = 不停止(急停)Positive := #Servo.Positive,//正方向Negative := #Servo.Negative,//负方向#Servo.NegativeJog1 := #Servo.Jog1,Jog2 := #Servo.Jog2,FlyRef := #Servo.FlyRef,//不选择运动中回零AckError := #Servo.AckError OR #In_Mode.Reset,//故障复位ExecuteMode := #Servo.ExecuteMode,Position := #Servo.Position,Velocity := #Servo.Velocity,OverV := #Servo.OverV,//加速度OverAcc := #Servo.OverAcc,//加速倍率OverDec := #Servo.OverDec,//减速倍率ConfigEPos := #Servo.ConfigEPos,//EPOS配置值HWIDSTW := #Servo.HWIDSTW,//硬件标识符HWIDZSW := #Servo.HWIDZSW,//硬件标识符Error => #Servo.Error,//驱动故障Status => #Servo.Status,//状态显示DiagID => #Servo.DiagID,//扩展的通讯故障AxisEnabled => #Servo.AxisEnabled,//驱动已使能AxisError => #Servo.AxisError,AxisWarn => #Servo.AxisWarn,AxisPosOk => #Servo.AxisPosOk,AxisRef => #Servo.AxisRef,//驱动器已回零ActVelocity => #Servo.ActVelocity,ActPosition => #Servo.ActPosition,ActMode => #Servo.ActMode,//当前运行模式Lockout => #Servo.Lockout,EPosZSW1 => #Servo.EPosZSW1,//状态字EPosZSW2 => #Servo.EPosZSW2,//状态字ActWarn => #Servo.ActWarn,//当前报警代码ActFault => #Servo.ActFault);//当前故障代码
//正负限位及原点//伺服位置反馈,无硬限位时的反馈逻辑IF #In_Home_HWLimitActive THEN#Status.Home_Done := #Servo.AxisRef;#Status.LM_Zero := #FB_SINA_POS_Instance.sxRecvBuf.Reserve.%X2;//原点#Status.LM_Postive := #FB_SINA_POS_Instance.sxRecvBuf.Reserve.%X0;//正限位#Status.LM_Negative := #FB_SINA_POS_Instance.sxRecvBuf.Reserve.%X1;//负限位//没有软限位及零点的时候需要考虑逻辑上设计软零位ELSIF NOT #In_Home_HWLimitActive THEN#Status.Home_Done := #Servo.AxisRef;#Status.LM_Zero := #FB_SINA_POS_Instance.sxRecvBuf.Reserve.%X2; //原点#Status.LM_Postive := TRUE;//正限位#Status.LM_Negative := TRUE;//负限位END_IF;
//回原点时的手动处理//ConfigEPos:bit0=OFF2自由停车 bit1=OFF3紧急停车 bit2=软限位开关激活//bit3=停止挡块激活 bit6=参考点挡块生效IF 4 = #Servo.ModePos AND #In_Home_HWLimitActive THEN#Servo.ConfigEPos := 16#3;//0011ELSIF 4 = #Servo.ModePos AND NOT #In_Home_HWLimitActive THEN#Servo.ConfigEPos := 16#3; (* 16#47;//0100 0111 *)END_IF;IF #In_Home_HWLimitActive THEN#Servo.ConfigEPos := 16#B;//1011,硬限位激活ELSIF NOT #In_Home_HWLimitActive THEN#Servo.ConfigEPos := 16#7;//0111,软限位激活END_IF;
//想要获取报文内容的方法
// 读取伺服驱动器里面的数据12word,填硬件标识符,和284一致;输出用长度12个字的数组
#Tp_piRetSFC := DPRD_DAT(LADDR := #In_HW_ID, RECORD => #Tp_swRecvBuf);
#St_swDiagID := INT_TO_WORD(#Tp_piRetSFC);
//手动回原点逻辑(非必要)
(*
St_sxSendBuf Struct
STW1 Word 16#043e
EPosSTW1 Word 16#0
EPosSTW2 Word 16#0
STW2 Word 16#0
OverrideV Word 16#4000
Position DInt 0
Velocity DInt 0
OverrideA Word 16#4000
OverrideD Word 16#4000
Reserve Word 16#0St_sxRecvBuf Struct
ZSW1 Word 16#0
EPosZSW1 Word 16#0
EPosZSW2 Word 16#0
ZSW2 Word 16#0
MELDW Word 16#0
Position DInt 0
Velocity DInt 0
ErrNr Word 16#0
WarnNr Word 16#0
Reserve Word 16#0
*)#St_P_clear(CLK := NOT #In_Execute);
IF #St_P_clear.Q THEN#St_sbJog1 := false;#St_sbJog2 := FALSE;#St_sbJogToRef := FALSE;#St_sbRefCamFallingFlag := false;#St_sbModeFlag := false;#St_sbExecute := false;#St_sbOff1 := 1;#St_ST_STEP := 0;#Out_Error := false; RESET_TIMER(#time);
END_IF;// 读取伺服驱动器里面的数据12word
#Tp_piRetSFC := DPRD_DAT(LADDR := #In_HW_ID, RECORD => #Tp_swRecvBuf);
#St_swDiagID := INT_TO_WORD(#Tp_piRetSFC);//check the receiving communication error
/在软限位激活的情况下强制把物理正负限位置1
IF #Tp_piRetSFC <> 0 AND #Out_Error = false THEN#Out_Error := true;#Out_ErrorInfo := #St_swDiagID;
ELSEIF TRUE = #In_HWLimitActive THEN#St_sxRecvBuf.Reserve := #Tp_swRecvBuf[11];///DI状态ELSE#St_sxRecvBuf.Reserve.%X0 := TRUE;//正限位#St_sxRecvBuf.Reserve.%X1 := TRUE;//负限位//零位#St_sxRecvBuf.Reserve.%X2 := #Tp_swRecvBuf[11].%X2;END_IF;#St_sxRecvBuf.EPosZSW1 := #Tp_swRecvBuf[1];////正负限位原点Jog信息#St_sxRecvBuf.ZSW1 := #Tp_swRecvBuf[0];///其他信息#St_sxRecvBuf.Position.%W1 := #Tp_swRecvBuf[5]; //位置实际值#St_sxRecvBuf.Position.%W0 := #Tp_swRecvBuf[6];///位置实际值#St_sxRecvBuf.Velocity.%W1 := #Tp_swRecvBuf[7];///速度实际值#St_sxRecvBuf.Velocity.%W0 := #Tp_swRecvBuf[8];///速度实际值#St_sbRefOk := #St_sxRecvBuf.ZSW1.%X11;///已设置参考点#St_sbCWLActive := #St_sxRecvBuf.EPosZSW1.%X9;///正向停止挡块生效#St_sbCCWLActive := #St_sxRecvBuf.EPosZSW1.%X8;///负向停止挡块生效#St_sbDriveFault := #St_sxRecvBuf.ZSW1.%X3;///存在故障#St_sbDriveReady := #St_sxRecvBuf.ZSW1.%X0;//准备接通信号#St_sbDriveEnabled := #St_sxRecvBuf.ZSW1.%X2; //使能信号#St_sbJogEnabled := #St_sxRecvBuf.EPosZSW1.%X10;////JOG生效CASE #St_ST_STEP OF0://#St_sbExecuteFlag := FALSE;#St_sbSetREF := false;#St_sbHWLimitActive := #In_HWLimitActive;#St_sbRefDir := #In_RefDir;IF #St_sxRecvBuf.Reserve.%X0 = TRUE AND #St_sxRecvBuf.Reserve.%X1 = TRUE AND #In_Execute THEN//X0表示正限位 X1表示负限位 X2表示原点#St_ST_STEP := 1;ELSE#St_sbJog1 := false;#St_sbJog2 := FALSE;#St_sbJogToRef := FALSE;#St_sbRefCamFallingFlag := false;#St_sbModeFlag := false;#St_sbExecute := false;END_IF;1:IF #St_sbModeFlag = false AND #St_sxRecvBuf.Reserve.%X0 = TRUE AND #St_sxRecvBuf.Reserve.%X1 = TRUE THEN#St_sbExecute := true; //开始回参考点信号END_IF;IF #In_RefCamPin = 1 THEN#St_sbRefCam := #St_sxRecvBuf.Reserve.%X2;ELSIF #In_RefCamPin = 2 THEN#St_sbRefCam := #St_sxRecvBuf.Reserve.%X1;ELSIF #In_RefCamPin = 3 THEN#St_sbRefCam := #St_sxRecvBuf.Reserve.%X2;ELSIF #In_RefCamPin = 4 THEN#St_sbRefCam := #St_sxRecvBuf.Reserve.%X3;ELSE#St_sbRefCam := false;END_IF;IF #St_sbModeFlag = FALSE AND (#St_sxRecvBuf.Reserve.%X0 = FALSE OR #St_sxRecvBuf.Reserve.%X1 = FALSE) THEN//修改20200731#St_sbExecute := false;#St_sbOff1 := false;#St_T_Delay(IN := NOT #St_sbOff1,PT := T#200MS);IF #St_T_Delay.Q THEN#St_sbHWLimitActive := FALSE;#St_sbAckError := true;#time(IN := #St_sbAckError AND NOT #St_sbDriveFault,PT := t#100ms);IF #time.Q THEN#St_sbModeFlag := true;END_IF;END_IF;END_IF;IF #St_sbModeFlag = true THENIF #St_sbDriveFault = false THEN#St_sbAckError := false;#St_sbOff1 := true;//使能END_IF;IF #St_sxRecvBuf.Reserve.%X0 = FALSE AND #St_sbDriveEnabled = true AND #St_sbOff1 THEN//修改20200731// IF #St_sxRecvBuf.Reserve.%X0 = FALSE THEN#St_sbJog1 := TRUE;#St_sbJog2 := FALSE;END_IF;IF #St_sxRecvBuf.Reserve.%X1 = FALSE AND #St_sbDriveEnabled = true AND #St_sbOff1 THEN//修改20200731// IF #St_sxRecvBuf.Reserve.%X1 = FALSE THEN#St_sbJog1 := FALSE;#St_sbJog2 := true;END_IF;#St_sbRefCamFalling(CLK := #St_sbRefCam,Q => #St_sbRefCamFallingFlag);IF #St_sbJogToRef = true AND #St_sbJogEnabled = false THEN#St_sbJogToRef := false;#St_sbExecute := true;END_IF;IF #St_sbRefCamFallingFlag = true THEN#St_sbJog1 := false;#St_sbJog2 := FALSE;#St_sbJogToRef := true;//已JOG至原点标志#St_sbRefCamFallingFlag := false;END_IF;END_IF;IF #St_sbRefOk = true OR #In_Execute = false THEN// #St_sbHWLimitActive := TRUE;#St_sbModeFlag := false;END_IF;END_CASE;
END_IF;//输出给V90信号
//Send data
#St_sxSendBuf.STW1.%X0 := #St_sbOff1 AND #In_EnableAxis;///使能
#St_sxSendBuf.STW1.%X7 := #St_sbAckError OR #In_AckError ;//应答故障
#St_sxSendBuf.STW1.%X8 := #St_sbJog1;///jog1信号
#St_sxSendBuf.STW1.%X9 := #St_sbJog2;///Jog2信号
#St_sxSendBuf.STW1.%X11 := #St_sbExecute AND #In_Execute;///开始回参考点
#St_sxSendBuf.EPosSTW2.%X1 := #St_sbSetREF;///设置参考点
#St_sxSendBuf.EPosSTW2.%X2 := #St_sbRefCam;///参考点档位生效
#St_sxSendBuf.EPosSTW2.%X9 := #St_sbRefDir;////1=开始反向搜索参考点 0=开始正向搜索参考点
#St_sxSendBuf.EPosSTW2.%X14 := (NOT #In_HWLimitActive);//激活软限位开关
#St_sxSendBuf.EPosSTW2.%X15 := #St_sbHWLimitActive AND #In_HWLimitActive; ///1=停止挡块生效#Tp_swSendBuf[0] := #St_sxSendBuf.STW1;
#Tp_swSendBuf[1] := #St_sxSendBuf.EPosSTW1;
#Tp_swSendBuf[2] := #St_sxSendBuf.EPosSTW2;
#Tp_swSendBuf[3] := #St_sxSendBuf.STW2;
#Tp_swSendBuf[4] := #St_sxSendBuf.OverrideV;
#Tp_swSendBuf[5] := #St_sxSendBuf.Position.%W1;
#Tp_swSendBuf[6] := #St_sxSendBuf.Position.%W0;
#Tp_swSendBuf[7] := #St_sxSendBuf.Velocity.%W1;
#Tp_swSendBuf[8] := #St_sxSendBuf.Velocity.%W0;
#Tp_swSendBuf[9] := #St_sxSendBuf.OverrideA;
#Tp_swSendBuf[10] := #St_sxSendBuf.OverrideD;
#Tp_swSendBuf[11] := #St_sxSendBuf.Reserve;
//send the command to the drive
IF #Out_Error = false THEN#Tp_piRetSFC := DPWR_DAT(LADDR := #In_HW_ID, RECORD := #Tp_swSendBuf);#St_swDiagID := INT_TO_WORD(#Tp_piRetSFC);
END_IF;IF #Tp_piRetSFC <> 0 AND #Out_Error = false THEN#Out_Error := true;#Out_ErrorInfo := #St_swDiagID;
END_IF;
#Out_RefOK := #St_sbRefOk;
#Out_Zero := #St_sxRecvBuf.Reserve.%X2;
#Out_Postive := #St_sxRecvBuf.Reserve.%X0;
#Out_Negative := #St_sxRecvBuf.Reserve.%X1;
///注意1: 在触发回原点信号的时候要先保证 轴已经使能 而且没有点动信号
///注意2: 在模式选择为4的时候才可以触发回原点指令 在模式选择不为4的时候触发FB284
///注意3: 在触发回原点的时候 用沿触发来把模式选择进行调整 同时复位回原点信号
///注意4: 需要在此块外面 再加上别的一些程序进行处理
关于FB284,常遇到的一些问题汇总
- FB284基本定控制常问问题
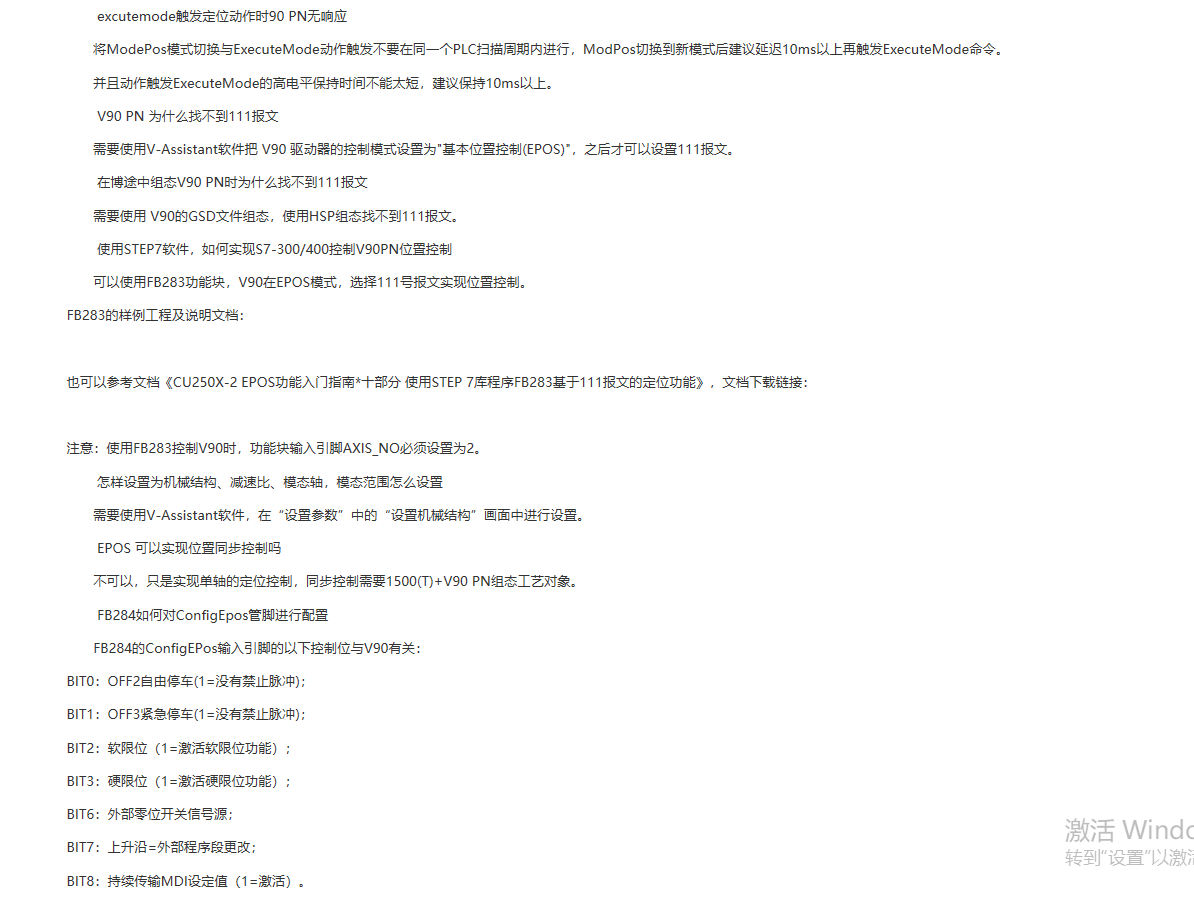
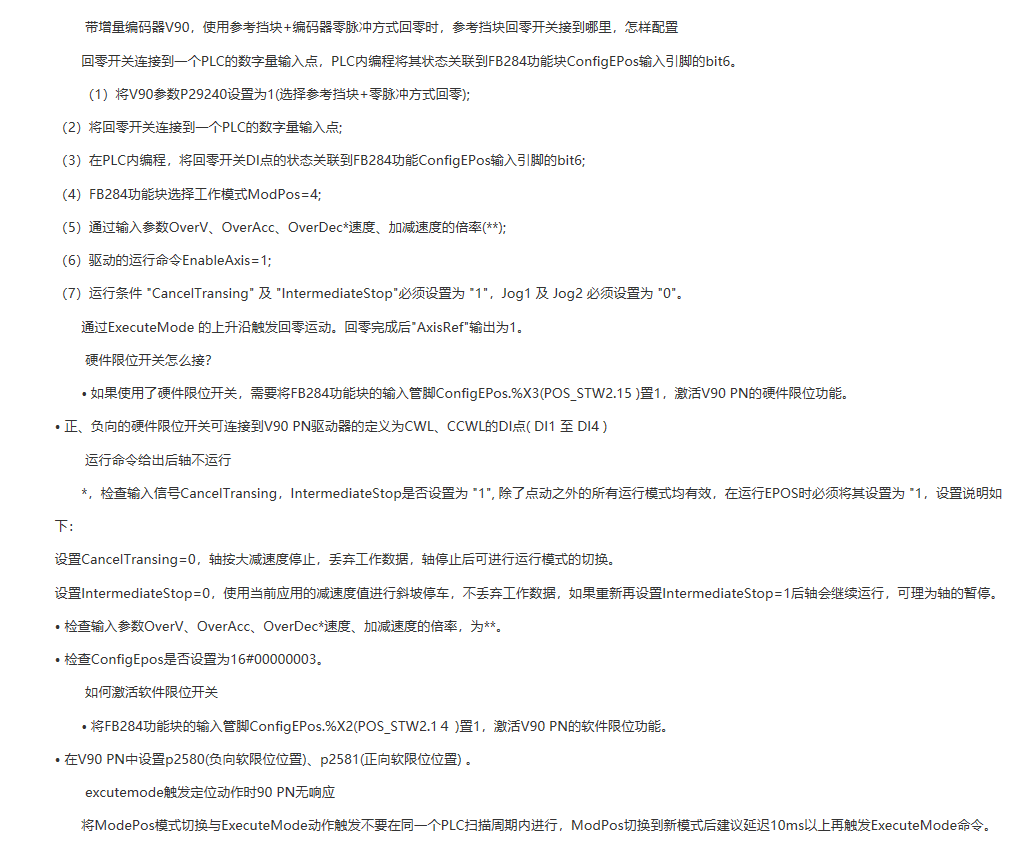


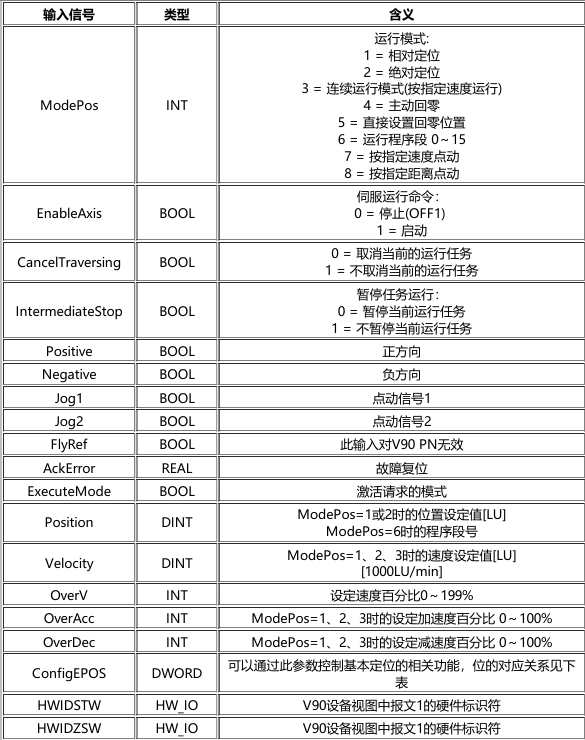
- FB284的参数管脚说明



![[Docker] 如何给 Docker 配置网络代理?](https://blog-static.cnblogs.com/files/johnnyzen/cnblogs-qq-group-qrcode.gif?t=1679679148)


