https://academy.universal-robots.cn/modules/e-Series-core-track/Chinese/module3/story_html5.html?courseId=2166&language=Chinese
教程1
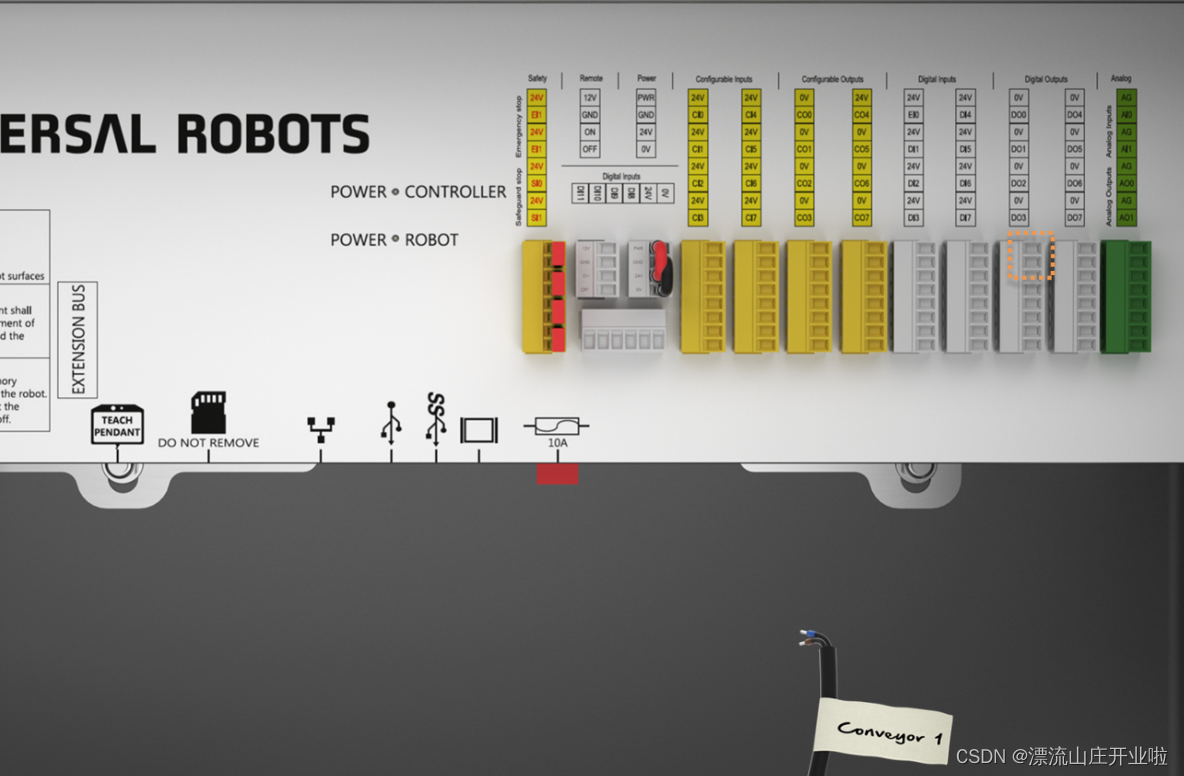
控制箱内部 包含: 主机板,SD卡,和安全控制板
安全控制板负责所有控制信息,包括输入输出
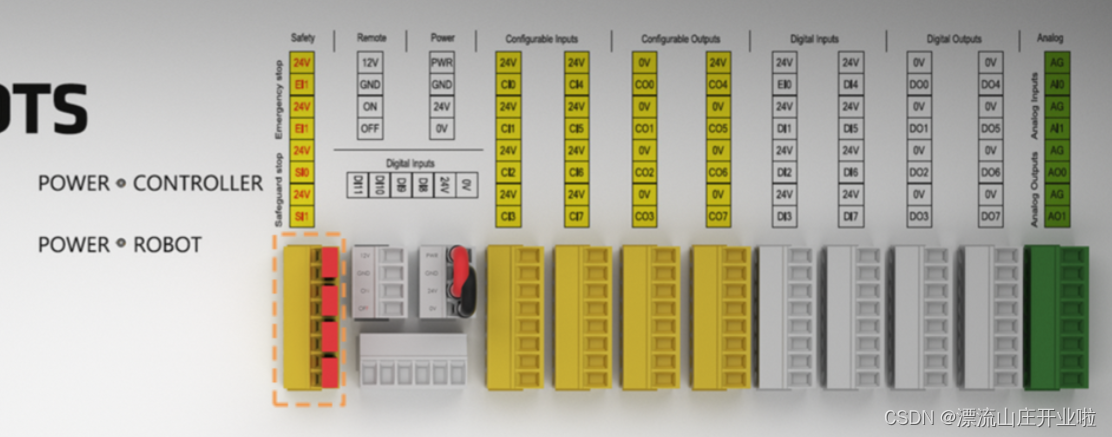
专用的冗余安全输入 用于连接 外部紧急停止和安全停止。
16个黄色接头 既可以通用,也可以配置为冗余安全输入和输出。
16个灰色接头 是通用的数字输入和输出。 如传感器和输送带。
16个灰色接头用于其他常规输入和输出功能。具体功能取决于机械臂的设计和配置。通常情况下,这些灰色接头可以用于连接传感器、执行器、通信接口等设备,以实现机械臂的功能扩展和集成。例如,它们可以用于连接附加传感器(如力传感器、视觉传感器)、外部设备(如扫描仪、摄像机)或与其他设备进行通信(如计算机、PLC控制器)。具体使用方式需要根据实际需求和系统设计进行配置和集成
在控制箱的内部放置有主机板、SD卡和安全控制板。安全控制板处理控制箱的所有输入和输出信息,并且可以连接至外围设备。例如安全装置、传感器、机器界面和按钮。
专用的冗余安全输入,用于连接外部紧急停止和安全停止。
16个黄色接头既可以通用,也可配置为冗余。安全输入和输出。
16个灰色接头是通用的数字输入和输出,如传感器和输送带。
绿色接头用于模拟信号。
安全控制板也包含一个微型电脑。具有快速计
算、以太网和USB连接能力。SD卡包含所有软件,包括Linux操作系统、UR机器人的专利编程界面,称为police group,以及由用户创建的程序。盒子内的最后一个物品是视角器,拿起视角器放到控制箱的前面。
通过示教器,您可以给机械臂通电,给机器人编程以执行特定任务,同时还可以控制发自外围设备的信号。例如夹爪和传感器。让我们尝试给机器人通电,并使用视觉器移动机器人,点击电源按钮给机器人。
手动引导机器人,按下按钮,移动机器人。
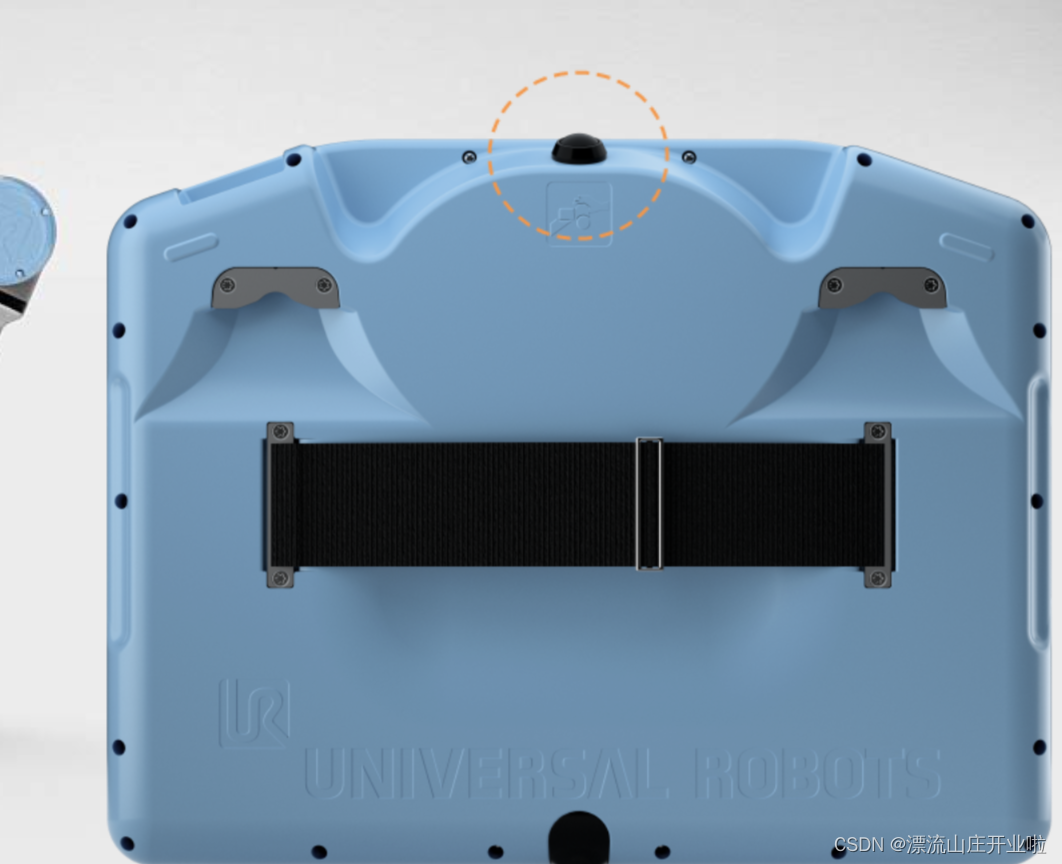
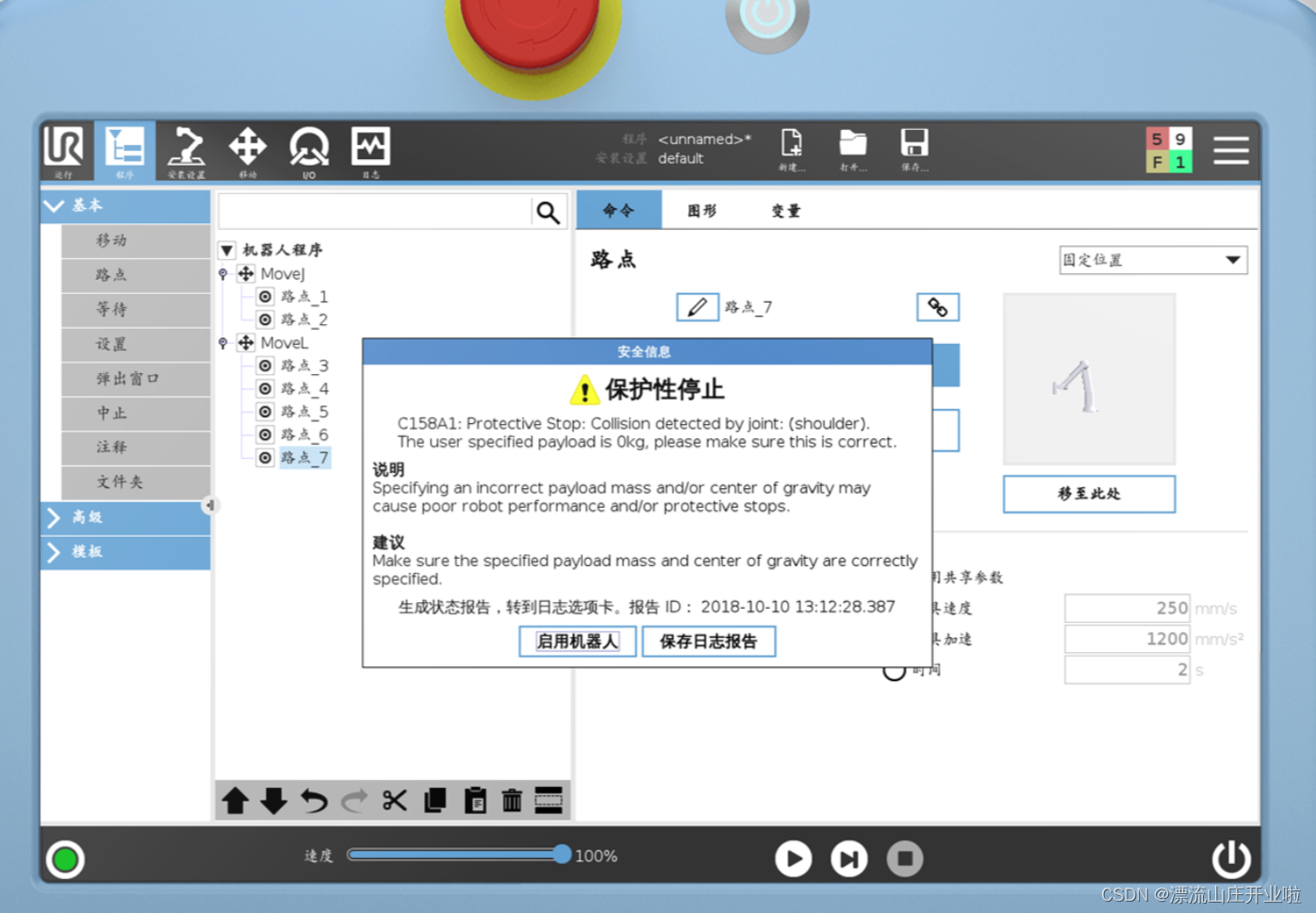
机器人触发保护性停止
官方教程2
输送机控制线 输出
机器人可以启动和停止输送机
传感器连接 输入
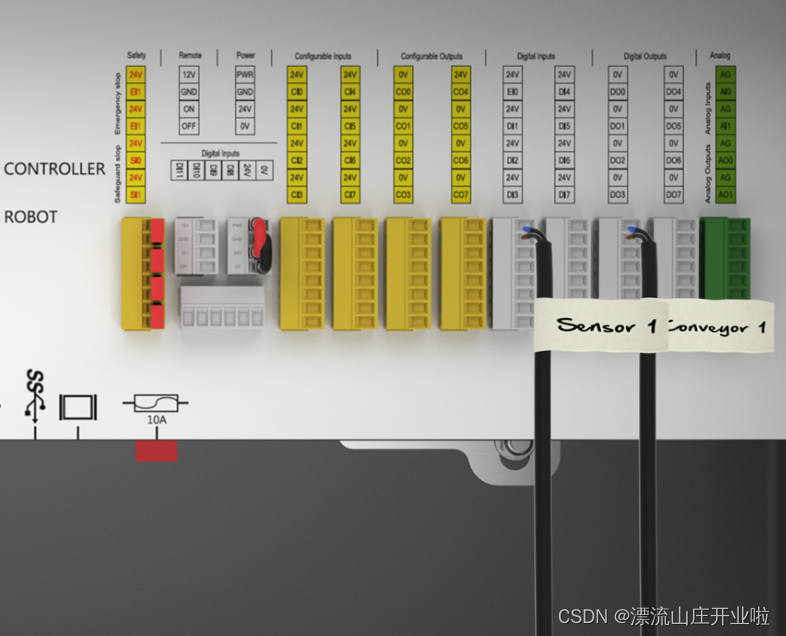
重命名输入和输出
io中分别为输入0和输出0命名 senor1 和convey1
官方3 设置工具 配置夹住

机器人达到最佳工作效果。机器人需要知晓相连末端执行器的特定信息,机器人需要知晓工具中心点的位置,同时机器人也需要知晓末端执行器的重心这些数值。定义为从工具法兰中心到点的位置间的距离。最后,机器人需要知晓有效负载,也就是末端执行器的重量。我们将从确定并配置工具中心点开始。
TCP


配置TCP
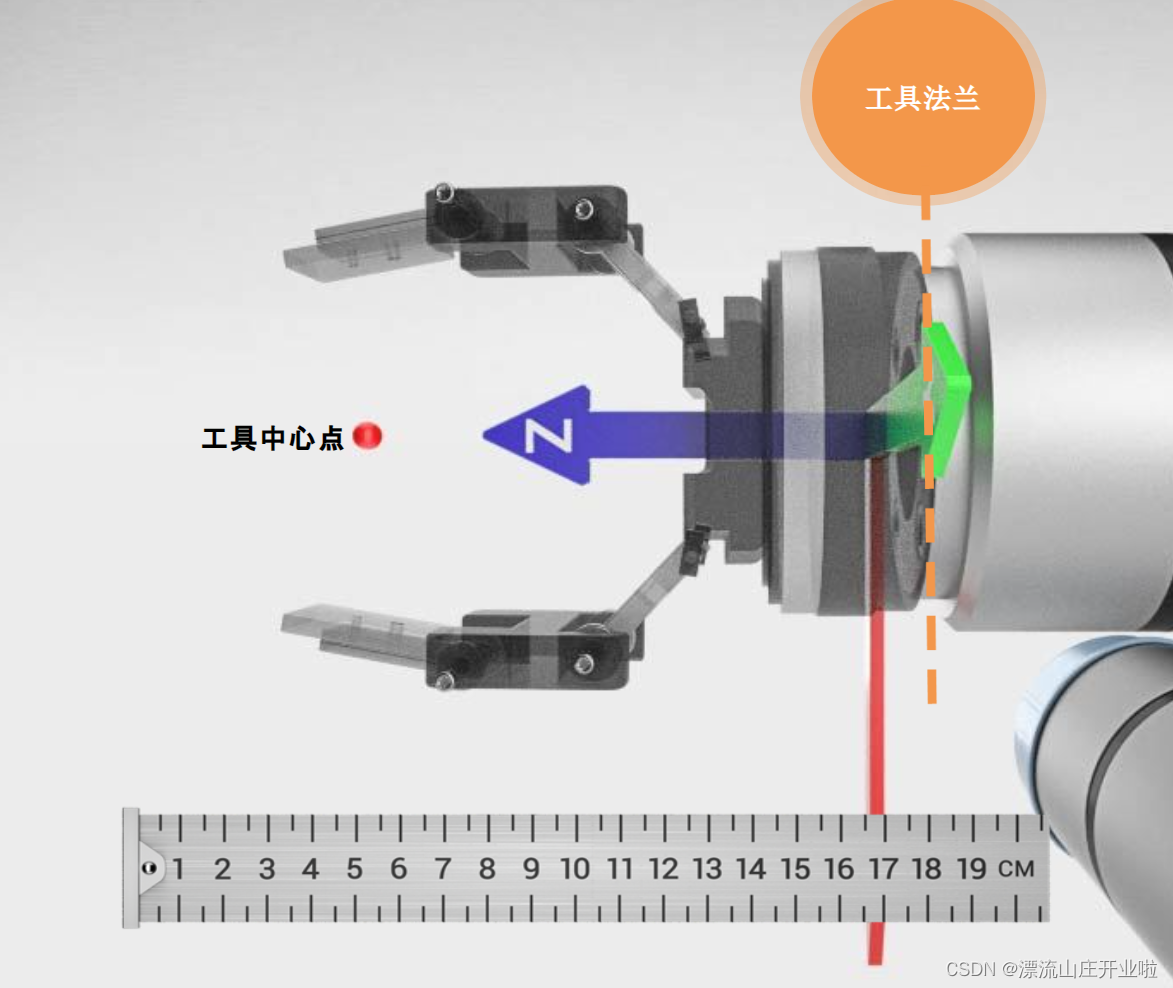
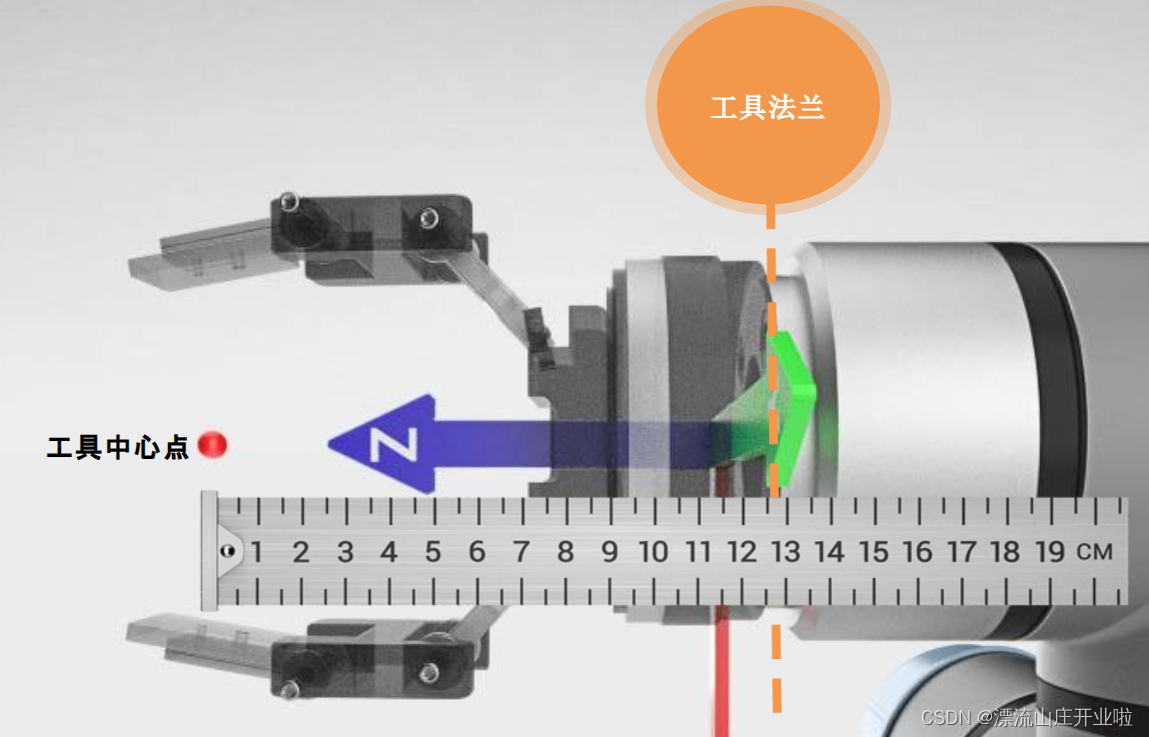
答案为125
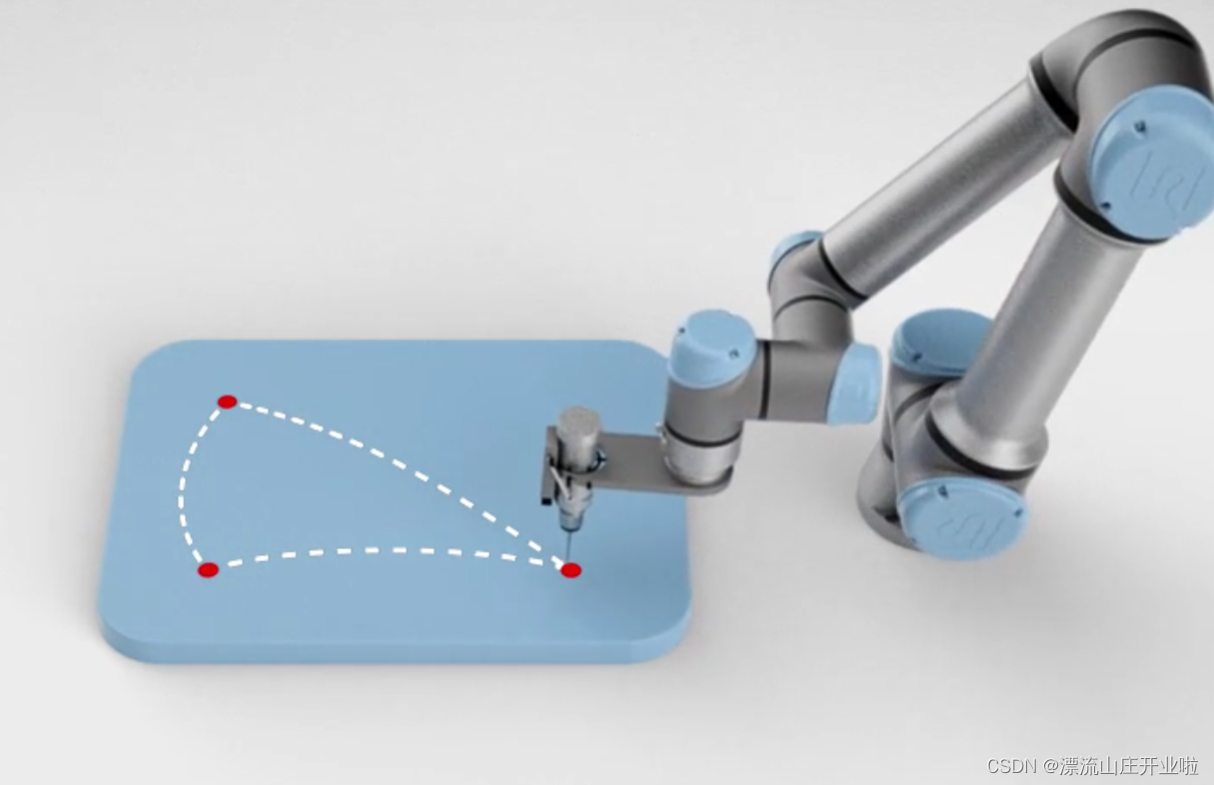
工具中心点测量
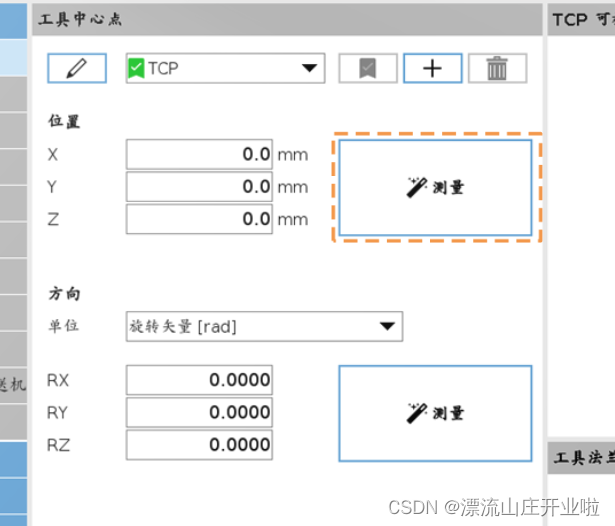
设置四个位置到达同一点 然后确认自动计算

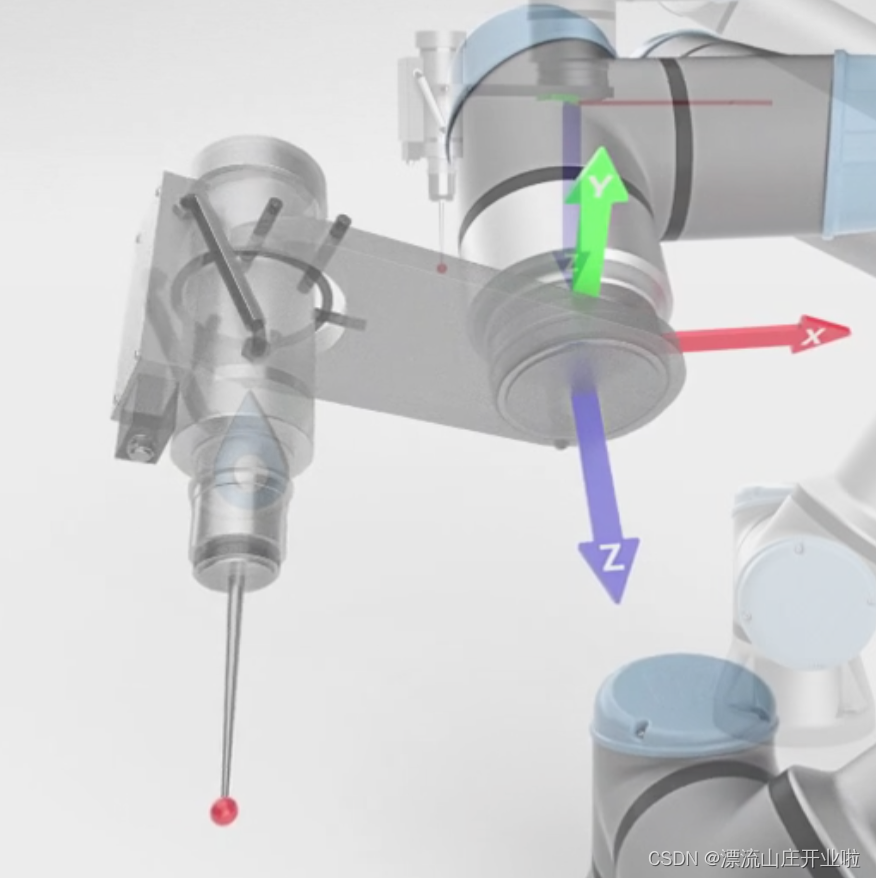
工具角度计算 方向
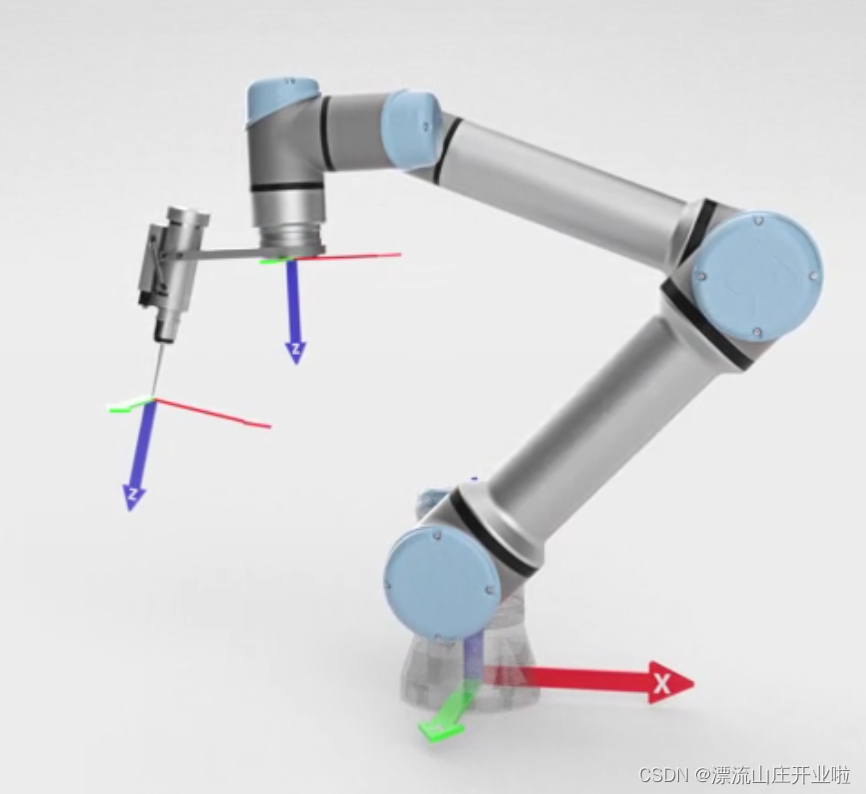
工具的XYZ并未与基座对应 有歪斜
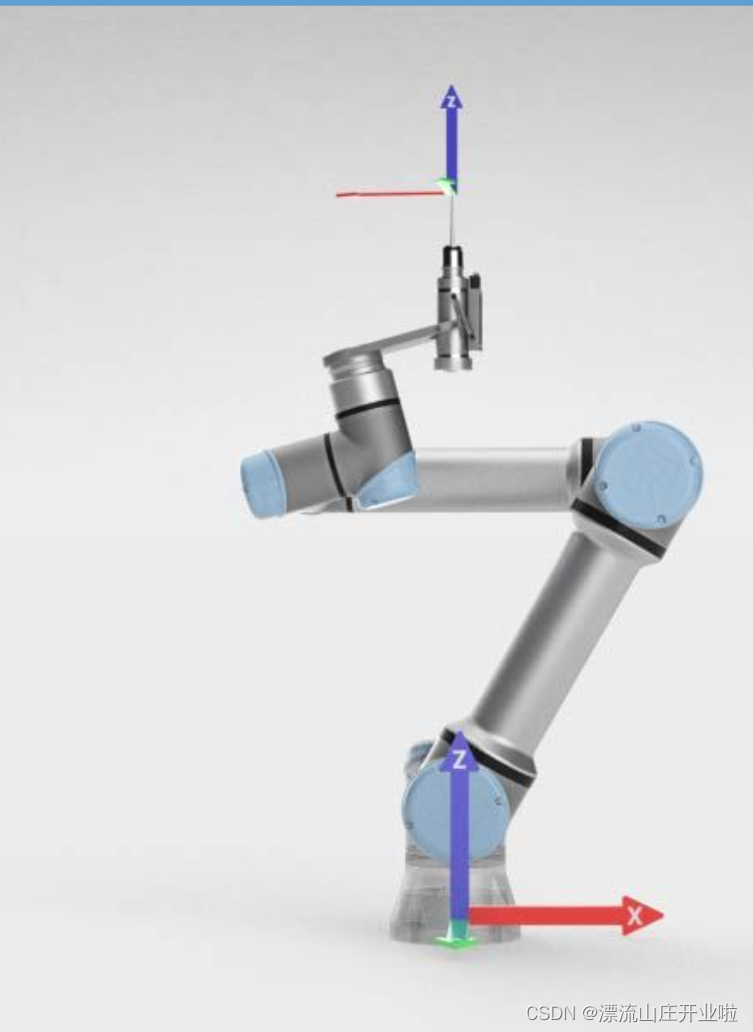
Z轴平行

方向 中 测量 一个个弄
创建程序
路点和路点移动组成
移动路径
move j
路径不重要,速度快
move L
直线运动 , TCP路径比较重要
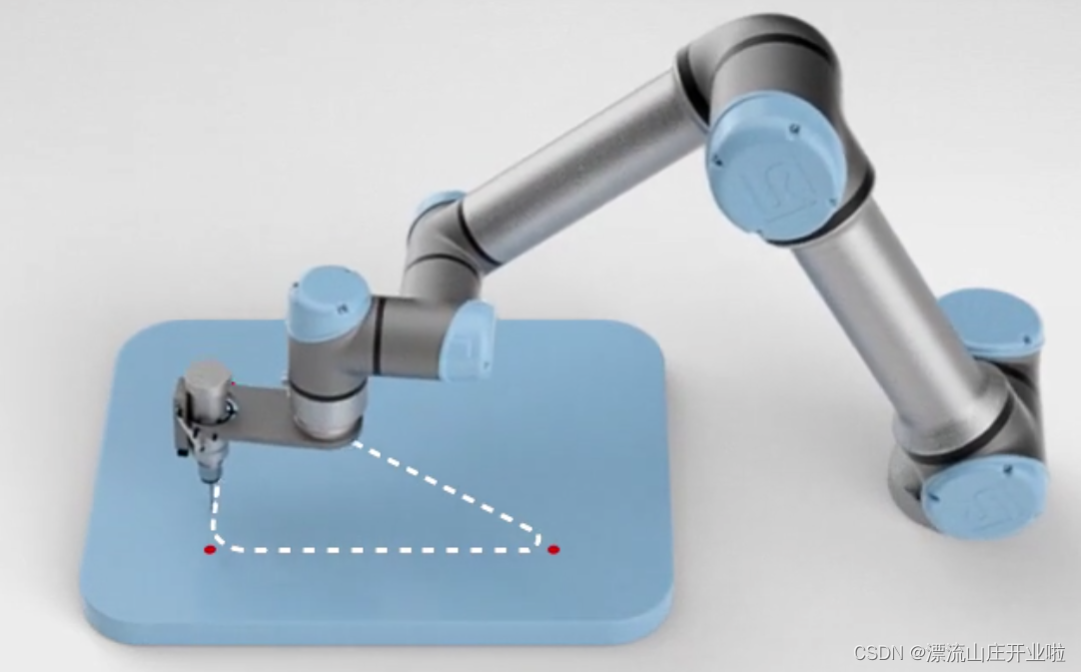
move P
工艺运动 与直线运动类似
TCP以恒定速度运动,没有急转弯,角度柔和,确保均匀分布
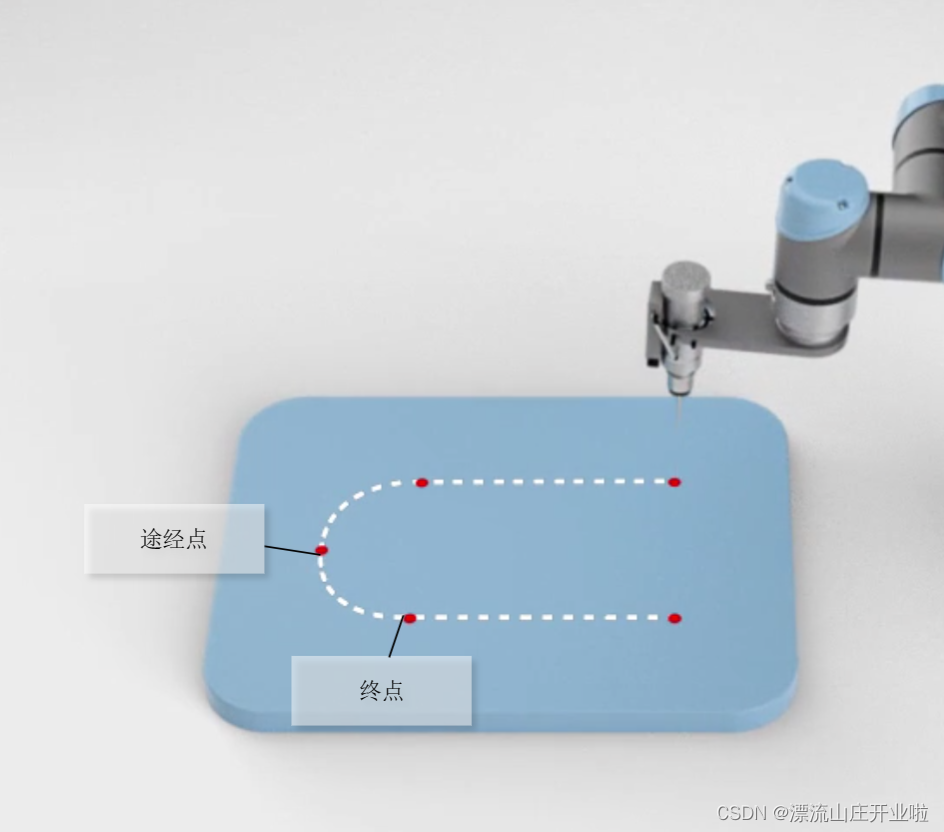
增加圆弧移动
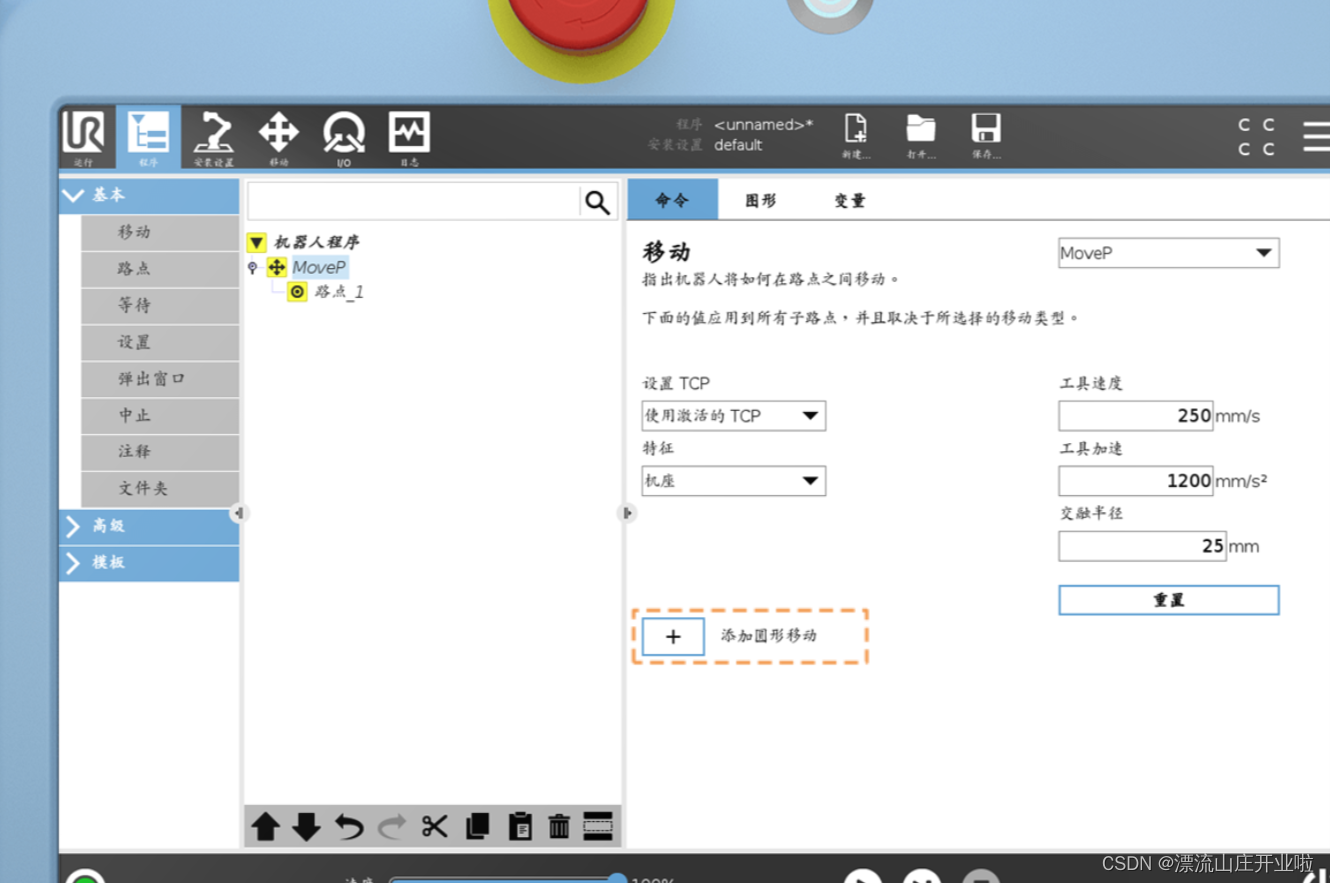

包含两个路店的圆弧运动将会插入程序树
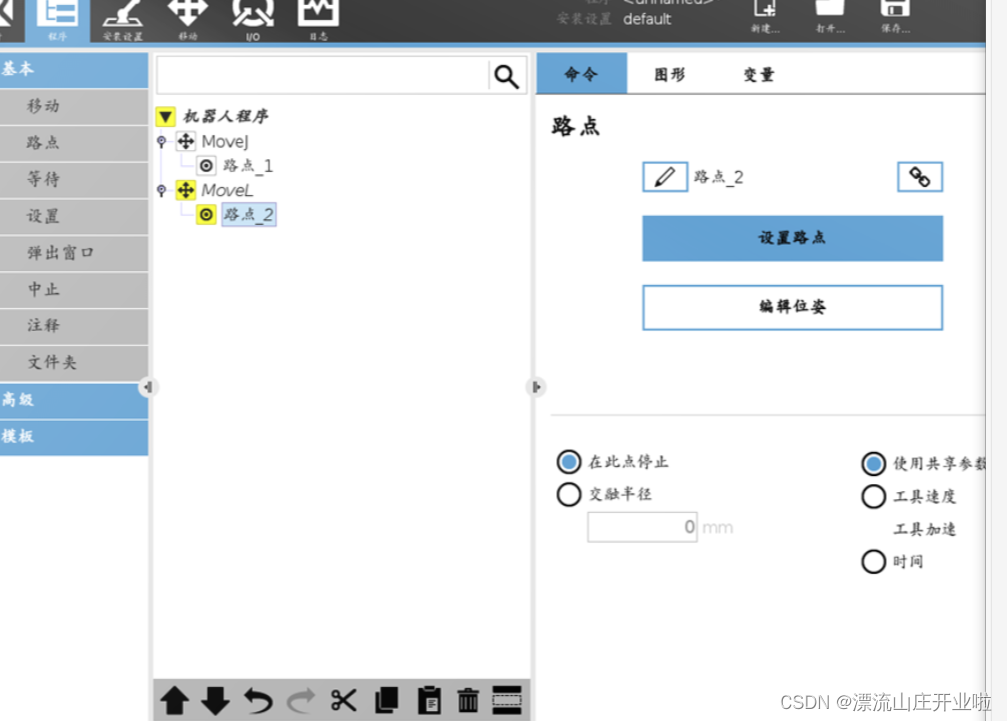
整体程序
先是Move J 给到一个路点,
然后点击Move J,添加一个并列的move

等待命令
等待数字输入
设置数字输出信号 夹爪 高电平关闭夹爪
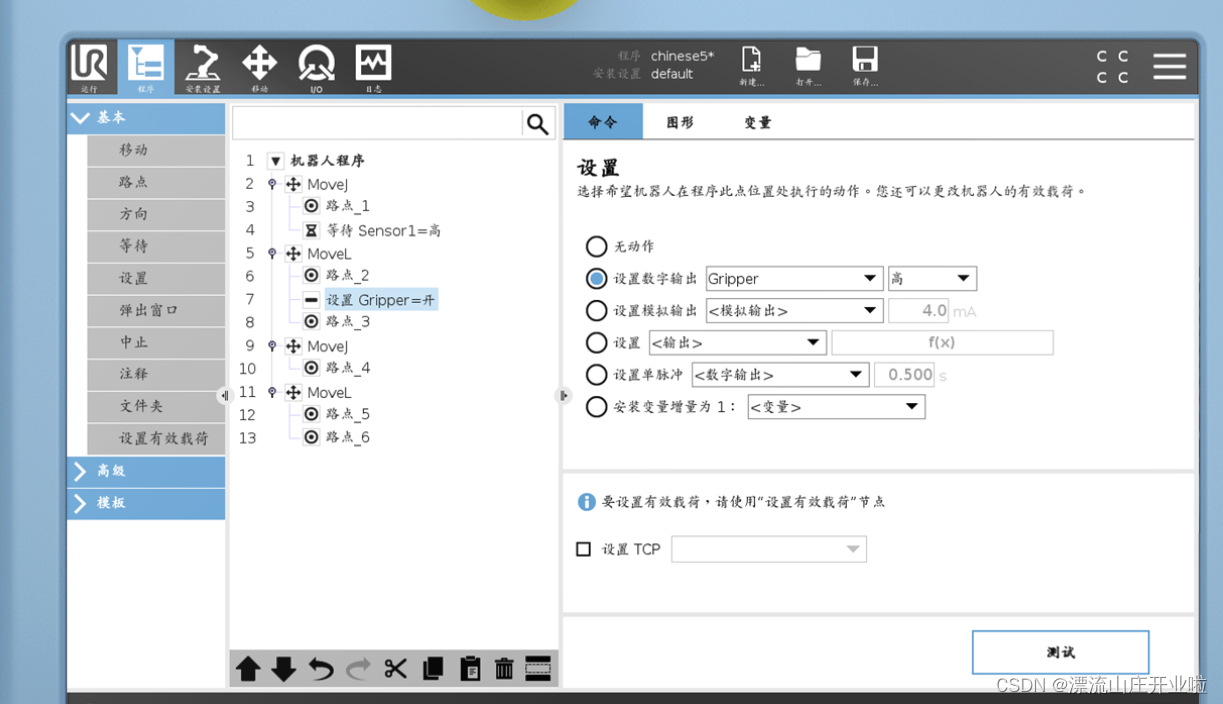
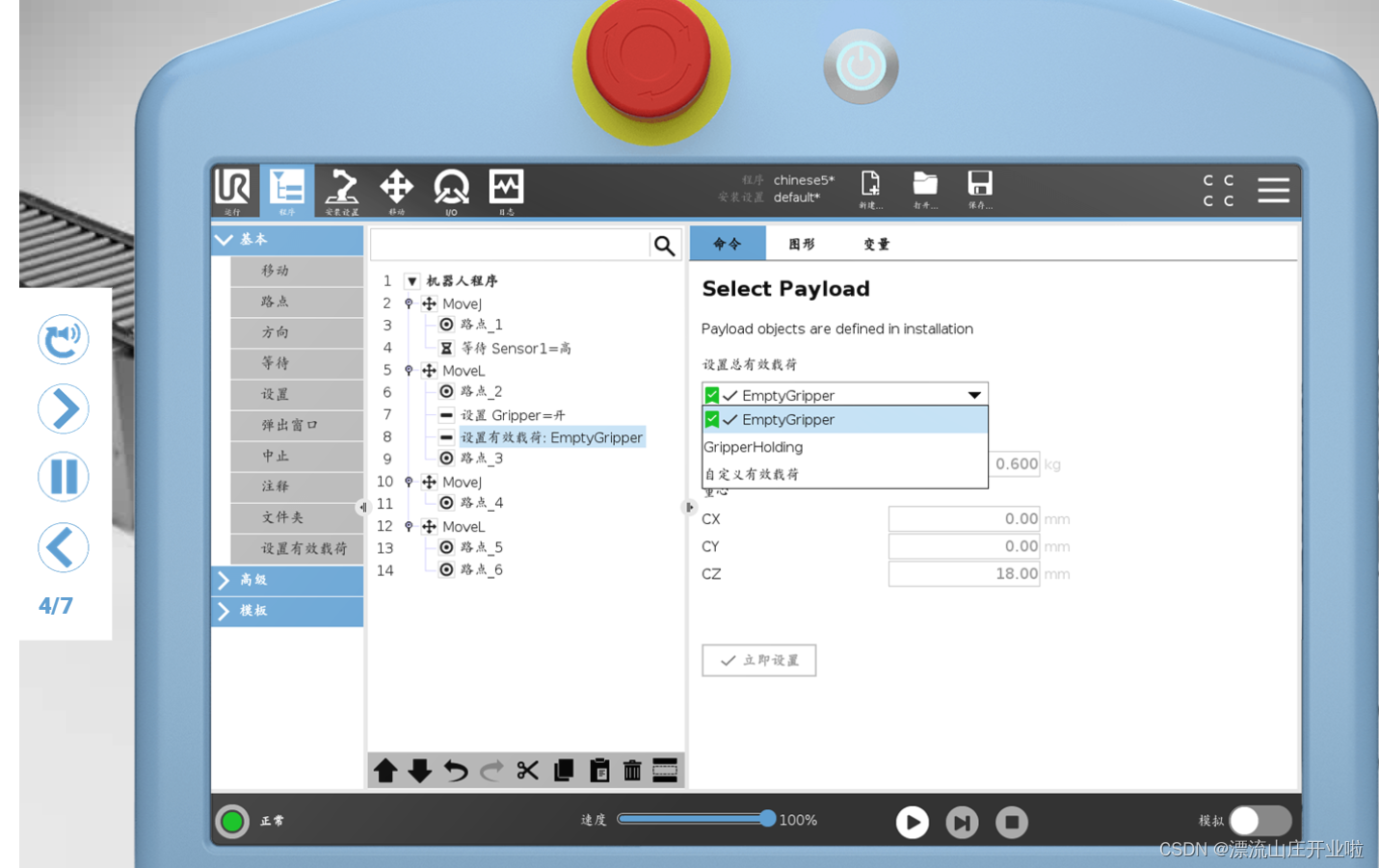
抓了物体后重心变化,载荷变化,加入有效载荷命令。 抓完后接着等待1秒。确保抓起

整体代码

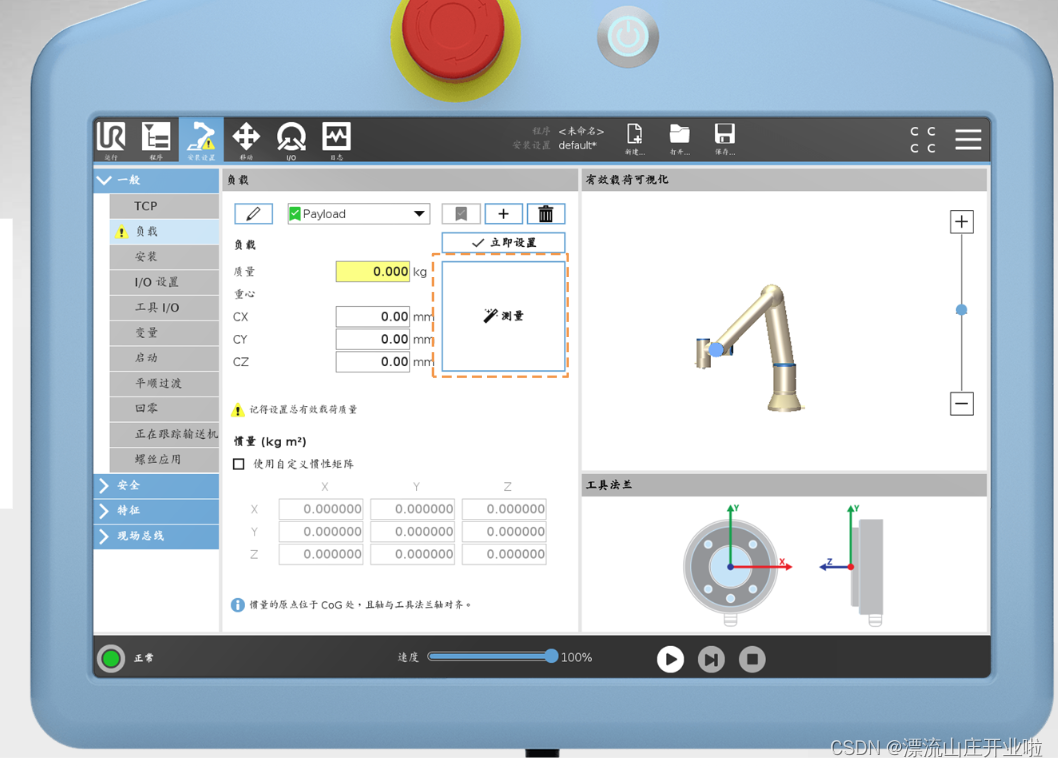
有效负载和重心

现在你已经学习了两种不同的配置工具中心点的方法,以及如何试教工具方向。下一步是配置有效负载和重心,请记住,有效负载定义为工具的重量。重心则指的是工具上两侧重量均匀分配的那个点。

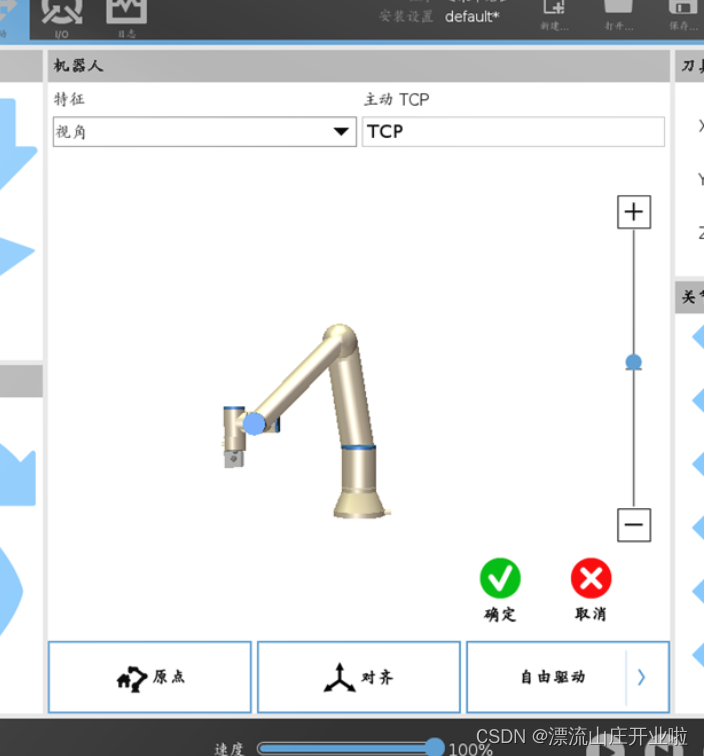
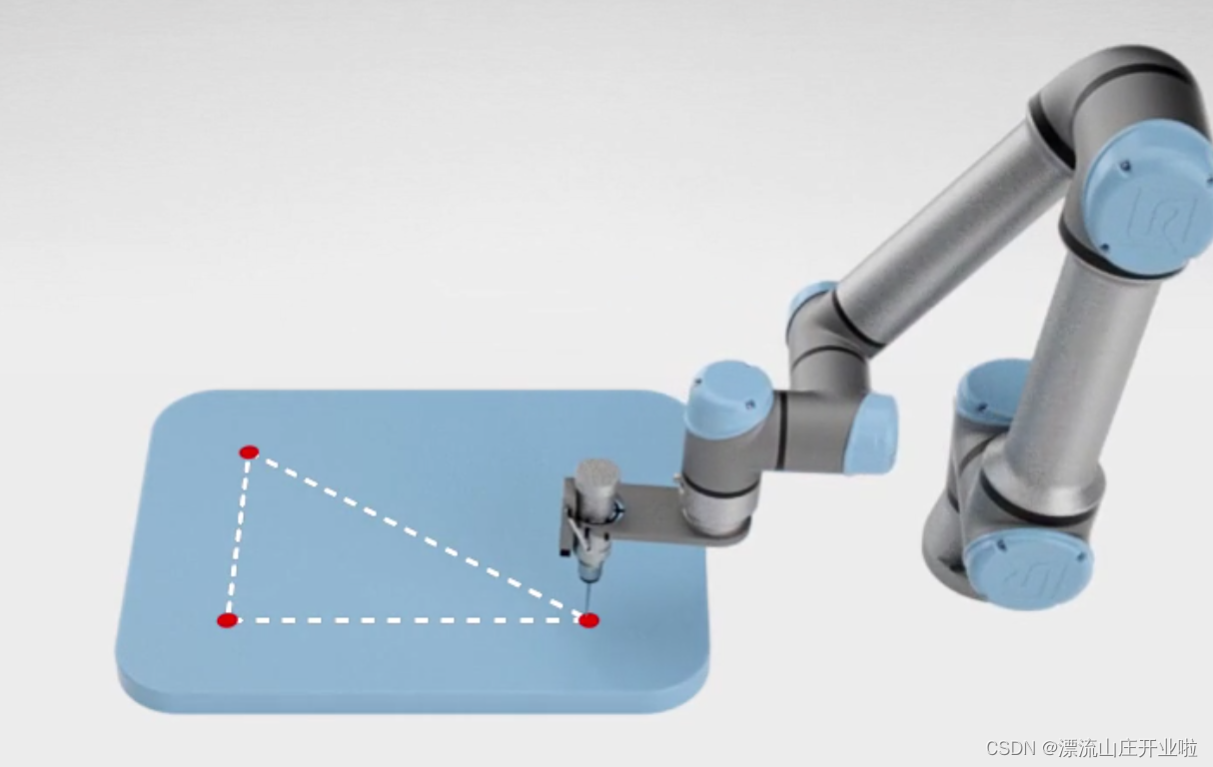
计算有效负载和重心
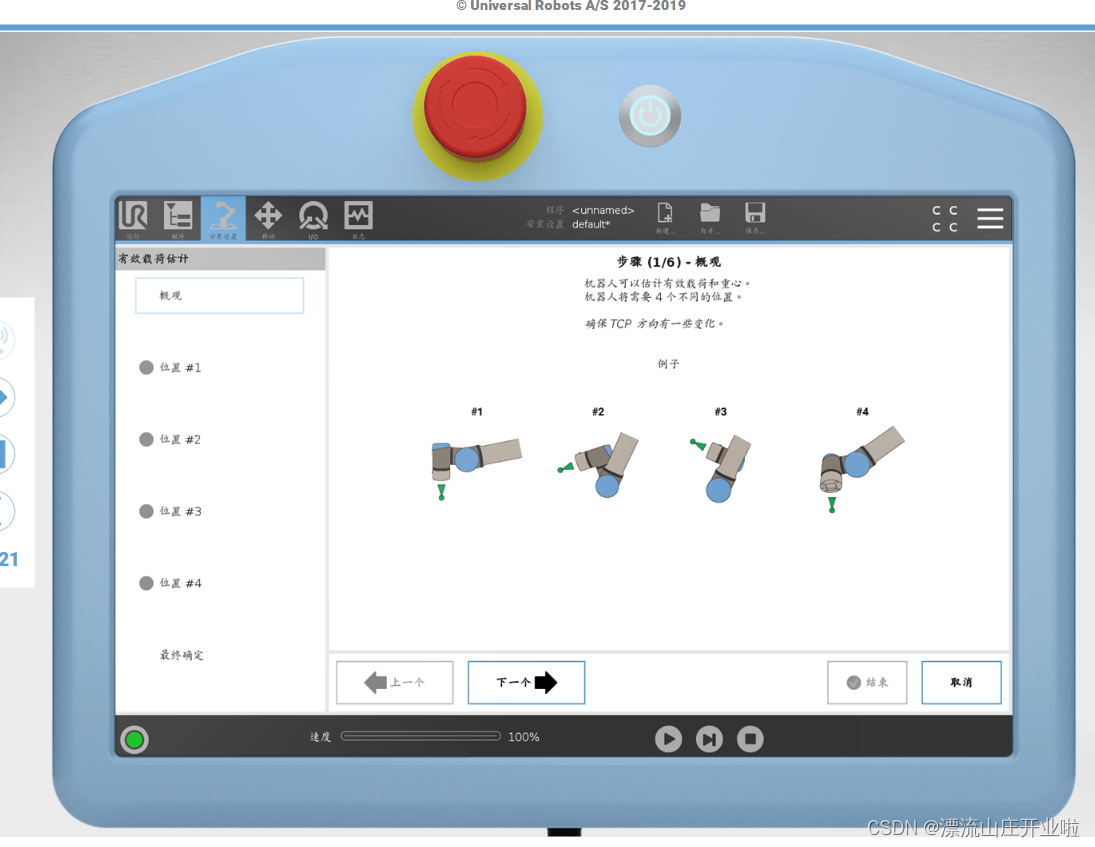
移动4个位置,设置4个位置。 不要触碰工具和工具法兰。 触碰腕关节到达某位置
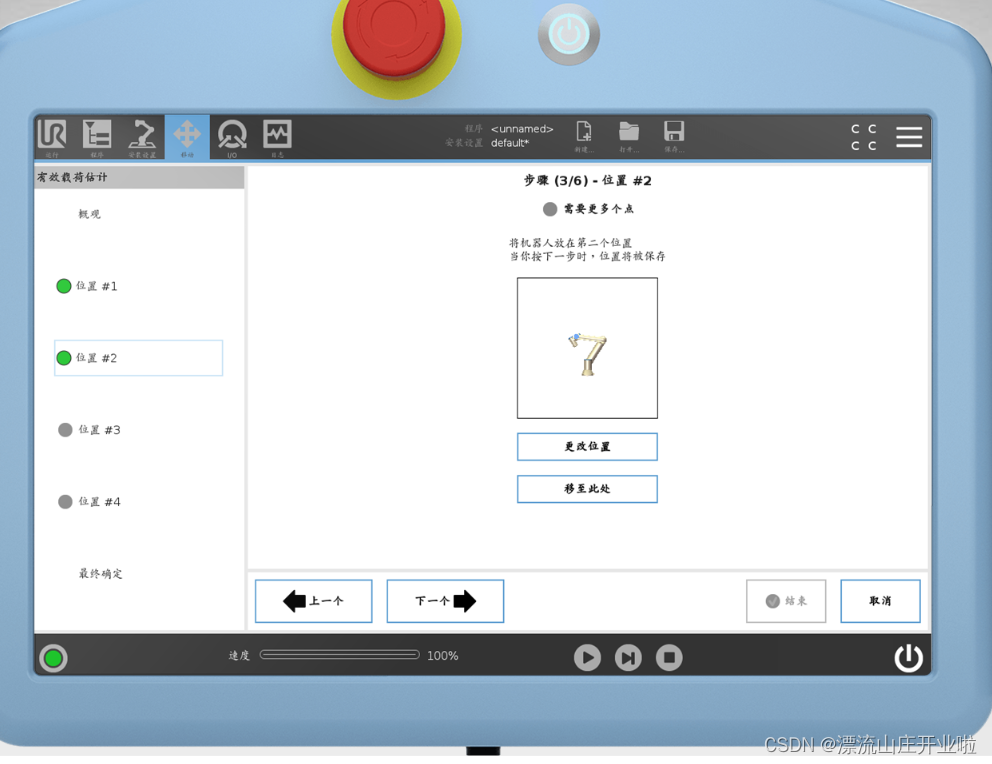
设置位置, 确认位置后,直接下一个
4个位置可以是 前后 左右摆动四个
与外部设备互动
设置和等待命令
设置可以
IO菜单
夹爪连线
https://blog.csdn.net/vor234/article/details/132204972
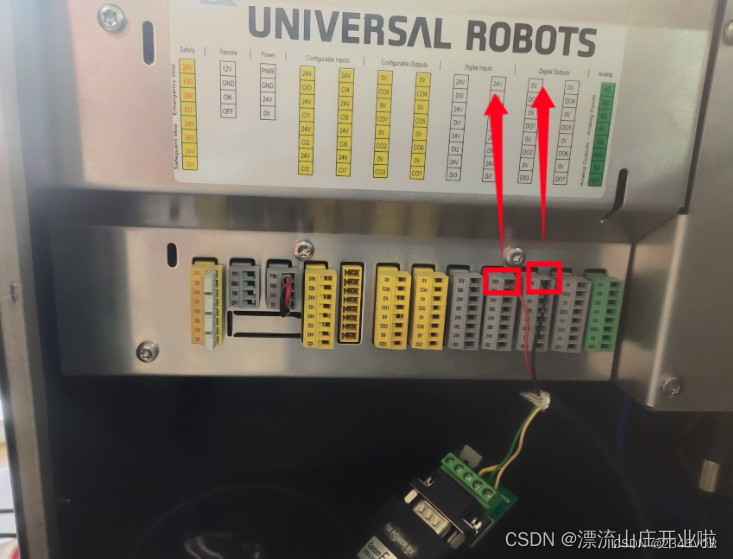
将485缆线分别接在24v和0v控制器上。
其中485模块线缆输出端接USB插口
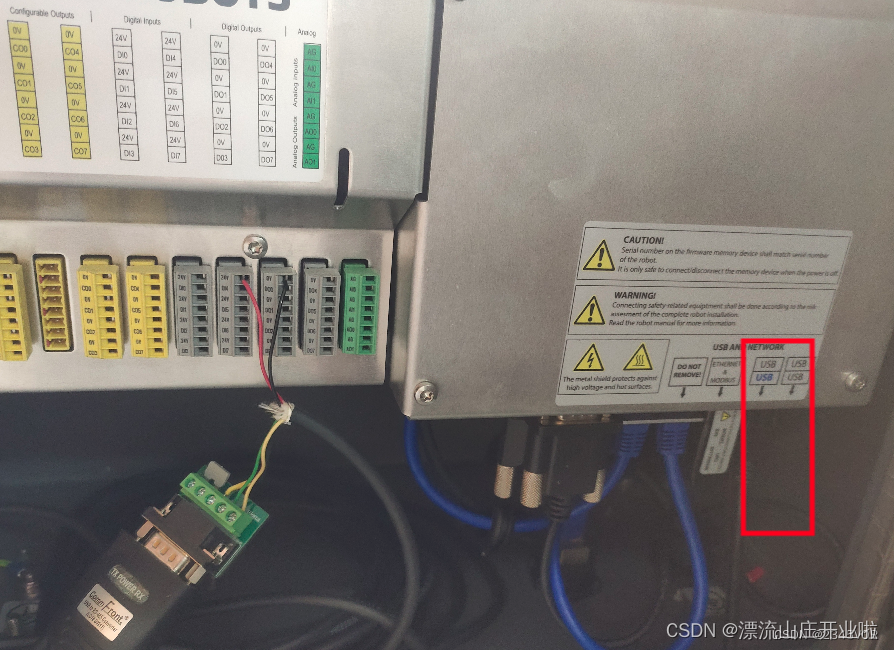
安装驱动
示教器拿u盘安装驱动