数据布局
3D数据的布局使得i方向上的网格点在内存中是连续的,而k方向上的栅格点则以nx*ny为步长。此映射以宏为例:
#define u(i, j, k) h_u[(i) + (j) * nx + (k) * nx * ny]
其中i、j和k周围的括号确保了等表达式的正确展开。在网格点位置应用的拉普拉斯模板,如图4-1所示。
图4-1 在网格点位置应用的拉普拉斯模板
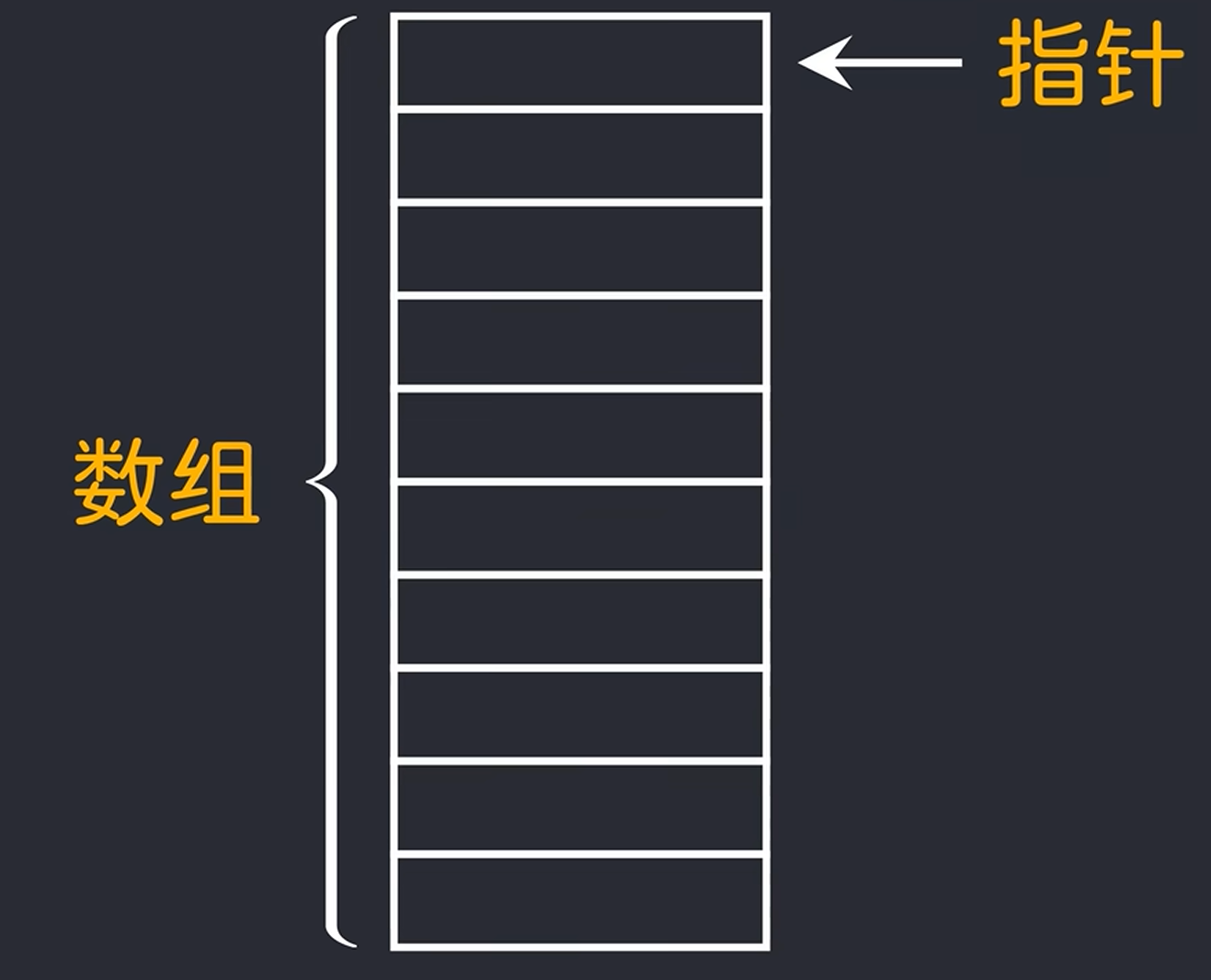
由于跨步数据布局,在j和k方向上彼此相邻的网格点在内存中实际上相距甚远。例如,考虑当nx=ny=nz=5时,中心差异模板的条纹存储空间架构,看到需要h_u[]数组(红色)中的哪些条目来更新输出数组h_f[]。这些条目不是连续的,如图4-2所示。
图4-2 中心差异模板的条纹存储空间
展示如何在AMD GPU上有效地处理这种内存访问模式。
4.1.4 HIP实施
首先,考虑一个大立方体,其中nx=ny=nz=512。首先使用双精度为输入数组d_u和输出数组d_f分配内存:
// 参数
size_t nx = 512, ny = 512, nz = 512; // 立方体尺寸
// 网格点间距
precision hx = 1.0 / (nx - 1), hy = 1.0 / (ny - 1), hz = 1.0 / (nz - 1);
// 输入输出数组
precision *d_u, *d_f;
// 设备上分配
size_t numbytes = nx * ny * nz * sizeof(precision);
hipMalloc((void**)&d_u, numbytes);
hipMalloc((void**)&d_f, numbytes);
d_u输入数组使用二次测试函数初始化,简化了验证正确性的任务(为简洁起见未显示)。
以下代码片段展示了拉普拉斯算子的初始HIP实现:
template <typename T>
__global__ void laplacian_kernel(T * f, const T * u, int nx, int ny, int nz, T invhx2, T invhy2, T invhz2, T invhxyz2) {
int i = threadIdx.x + blockIdx.x * blockDim.x;
int j = threadIdx.y + blockIdx.y * blockDim.y;
int k = threadIdx.z + blockIdx.z * blockDim.z;
// 如果此线程位于边界上,则退出
if (i == 0 || i >= nx - 1 ||
j == 0 || j >= ny - 1 ||
k == 0 || k >= nz - 1)
return;
const int slice = nx * ny;
size_t pos = i + nx * j + slice * k;
// 计算模板操作的结果
f[pos] = u[pos] * invhxyz2
+ (u[pos - 1] + u[pos + 1]) * invhx2
+ (u[pos - nx] + u[pos + nx]) * invhy2
+ (u[pos - slice] + u[pos + slice]) * invhz2;
}
template <typename T>
void laplacian(T *d_f, T *d_u, int nx, int ny, int nz, int BLK_X, int BLK_Y, int BLK_Z, T hx, T hy, T hz) {
dim3 block(BLK_X, BLK_Y, BLK_Z);
dim3 grid((nx - 1) / block.x + 1, (ny - 1) / block.y + 1, (nz - 1) / block.z + 1);
T invhx2 = (T)1./hx/hx;
T invhy2 = (T)1./hy/hy;
T invhz2 = (T)1./hz/hz;
T invhxyz2 = -2. * (invhx2 + invhy2 + invhz2);
laplacian_kernel<<<grid, block>>>(d_f, d_u, nx, ny, nz, invhx2, invhy2, invhz2, invhxyz2);
}
拉普拉斯宿主函数负责启动设备内核拉普拉斯核,线程块大小为BLK_X=256,BLK_Y=1,BLK_Z=1。BLK_X*BLK_Y*BLK_Z=256的当前线程块大小是推荐的默认选择,因为它很好地映射到硬件工作调度器,但其他选择可能会更好。一般来说,选择此性能参数可能高度依赖于问题大小、内核实现和设备的硬件特性。虽然这个内核实现支持3D块大小,但GPU没有2D和3D的概念。定义3D组的可能性是作为程序员的便利功能提供的。
HIP实现适用于GPU内存中适合的任何问题大小。对于不能平均除以线程块大小的问题大小,引入了处理剩余部分的其他组。如果剩余部分很小,即许多线程映射到计算域之外没有工作可做的区域,这些额外的线程块可能会具有较低的线程利用率。这种低线程利用率会对性能产生负面影响。将关注可被线程块大小整除的问题大小。要调度的块数由上限操作(nx-1)/block.x+1,…决定。如前所述,它对组的数量进行四舍五入,以确保覆盖整个计算域。
内核中的退出条件。当线程位于边界上或边界外时,返回(退出),因为只计算内部点的有限差分。内核退出策略在实践中的工作原理是,由于波阵面以锁步方式执行指令,因此边界外的任何线程都将被其余内核屏蔽。被屏蔽的线程在执行指令期间将处于空闲状态。回到性能问题,块大小不能平均分配问题大小。如果选择nx=258,将在x方向上得到两个线程块,但第二个线程块中只有一个线程有工作要做。
// 计算模板操作的结果
f[pos] = u[pos] * invhxyz2
+ (u[pos - 1] + u[pos + 1]) * invhx2
+ (u[pos - nx] + u[pos + nx]) * invhy2
+ (u[pos - slice] + u[pos + slice]) * invhz2;
多次访问数组u。对于每次访问,编译器将生成一条全局加载指令,该指令将从全局内存中访问数据,除非该数据已存在于缓存中。正如将看到的,这些全局加载指令可能会对性能产生重大影响。
![[以太网/汽车网络] 车载服务通信(SOME/IP)设计实践 [转]](https://blog-static.cnblogs.com/files/johnnyzen/cnblogs-qq-group-qrcode.gif?t=1679679148)