数学基础、算法与编程
1. BAP 技能
BAP 技能是指基础(Basic)、算法(Algorithm)和编程(Programm)三种基本技能的深度融合。理工科以数学、算法与编程为根基,这三个相辅相成又各有区别。
-
(1)数学以线性代数为主要研究工具和部分微积分技术为手段,来实现优化的目标。
-
(2)算法是应用数学和各类数据分析方法的灵魂,搭建了数学与应用领域的之间的桥梁,通常是一种真实解的逼近过程,其中主要涉及到矩阵的运算。
-
(3)编程泛指一切的计算机语言,通过循环迭代的方式编制出计算过程,如Matlab、Python、C++等,其中会有众多的库可以调用,如scikit-learn、CVX优化库、OpenCV图像处理库等等。
注意:算法和编程是两个严格区分的领域,算法需要深厚的数学功底,编程需要的是简单逻辑。
2. 传统算法
一类常见的算法是误差项 f ( x , w ) f(\boldsymbol{x},\boldsymbol{w}) f(x,w) 和复杂度测度项 g ( w ) g(\boldsymbol{w}) g(w) 的折衷,形如
min w f ( x , w ) + g ( w ) \min_{\boldsymbol{w}}\;f(\boldsymbol{x},\boldsymbol{w})+g(\boldsymbol{w}) wminf(x,w)+g(w)
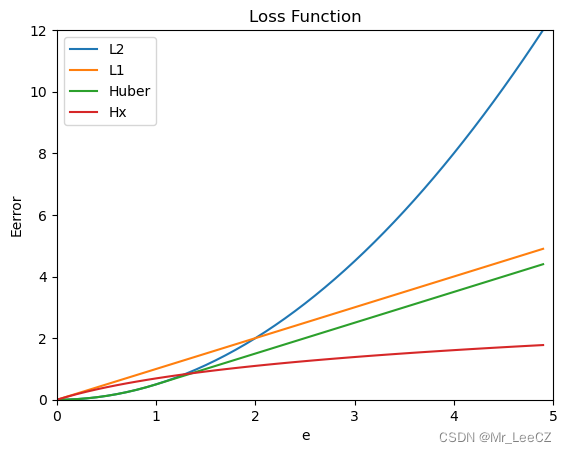
常见的误差项,又称损失函数有以下几种(以回归问题为例)
- 平方损失
f ( x , w ) = ∥ X w − b ∥ 2 2 = ∑ i ( w i x i − b i ) 2 f(\boldsymbol{x},\boldsymbol{w})=\Vert X\boldsymbol{w}-\boldsymbol{b}\Vert_2^2=\sum_i(w_ix_i-b_i)^2 f(x,w)=∥Xw−b∥22=i∑(wixi−bi)2
- 绝对值损失
f ( x , w ) = ∥ X w − b ∥ 1 = ∑ i ∣ b i − w i x i ∣ f(\boldsymbol{x},\boldsymbol{w})=\Vert X\boldsymbol{w}-\boldsymbol{b}\Vert_1=\sum_i\Big\vert b_i-w_ix_i\Big\vert f(x,w)=∥Xw−b∥1=i∑ bi−wixi
- Hubber 损失
Huber = { 1 2 e i 2 ∣ e i ∣ < δ δ ∣ e i ∣ − 1 2 δ 2 Otherwise \text{Huber}=\left\{ \begin{array}{lcl} \frac{1}{2}e_i^2 & & \vert e_i\vert<\delta\\ \delta\vert e_i\vert -\frac{1}{2}\delta^2 & & \text{Otherwise} \end{array} \right. Huber={21ei2δ∣ei∣−21δ2∣ei∣<δOtherwise
# huber 损失
def huber(e, delta):loss = np.where(np.abs(e) < delta , 0.5*(e**2), delta*np.abs(e) - 0.5*(delta**2))return lossimport numpy as np
import matplotlib.pyplot as plte = np.arange(0,5,0.1)
z1 = 0.5*e**2
z2 = np.abs(e)
z3 = huber(e,1)
z4 = np.log(1+np.abs(e))plt.plot(e,z1,label='L2')
plt.plot(e,z2,label='L1')
plt.plot(e,z3,label='Huber')
plt.plot(e,z4,label='Hx')
plt.title('Loss Function')
plt.axis([0,5,0,12])
plt.legend()
plt.xlabel('e')
plt.ylabel('Eerror')
plt.show()
常见的目标函数
min w ∥ X w − b ∥ 2 2 + ∥ w ∥ 2 2 \min_{\boldsymbol{w}}\;\Vert X\boldsymbol{w}-\boldsymbol{b}\Vert_2^2+\Vert \boldsymbol{w}\Vert_2^2 wmin∥Xw−b∥22+∥w∥22
min w ∥ X w − b ∥ 2 2 + ∥ w ∥ 1 \min_{\boldsymbol{w}}\;\Vert X\boldsymbol{w}-\boldsymbol{b}\Vert_2^2+\Vert \boldsymbol{w}\Vert_1 wmin∥Xw−b∥22+∥w∥1
min w ∥ X w − b ∥ 1 \min_{\boldsymbol{w}}\;\Vert X\boldsymbol{w}-\boldsymbol{b}\Vert_1 wmin∥Xw−b∥1
min w ∥ X − U V T ∥ F 2 , s . t . U ≥ 0 , V ≥ 0 \min_{\boldsymbol{w}}\;\Vert X-UV^T\Vert_F^2,\;\;\;s.t.\;\;U\geq0,V\geq 0 wmin∥X−UVT∥F2,s.t.U≥0,V≥0
min w ∥ X − U V T ∥ 1 , s . t . U ≥ 0 , V ≥ 0 \min_{\boldsymbol{w}}\;\Vert X-UV^T\Vert_1,\;\;\;s.t.\;\;U\geq0,V\geq 0 wmin∥X−UVT∥1,s.t.U≥0,V≥0
min w ∥ X − U V T ∥ 2 , 1 , s . t . U ≥ 0 , V ≥ 0 \min_{\boldsymbol{w}}\;\Vert X-UV^T\Vert_{2,1},\;\;\;s.t.\;\;U\geq0,V\geq 0 wmin∥X−UVT∥2,1,s.t.U≥0,V≥0
min w ∥ X − U V T ∥ 2 , 1 + ∥ U ∥ 1 , s . t . U ≥ 0 , V ≥ 0 \min_{\boldsymbol{w}}\;\Vert X-UV^T\Vert_{2,1}+\Vert U\Vert_1,\;\;\;s.t.\;\;U\geq0,V\geq 0 wmin∥X−UVT∥2,1+∥U∥1,s.t.U≥0,V≥0
min w ∥ X − U V T ∥ 2 , 1 + ∥ U ∥ ∗ , s . t . U ≥ 0 , V ≥ 0 \min_{\boldsymbol{w}}\;\Vert X-UV^T\Vert_{2,1}+\Vert U\Vert_*,\;\;\;s.t.\;\;U\geq0,V\geq 0 wmin∥X−UVT∥2,1+∥U∥∗,s.t.U≥0,V≥0
可通过一些优化工具箱或者优化工具进行求解
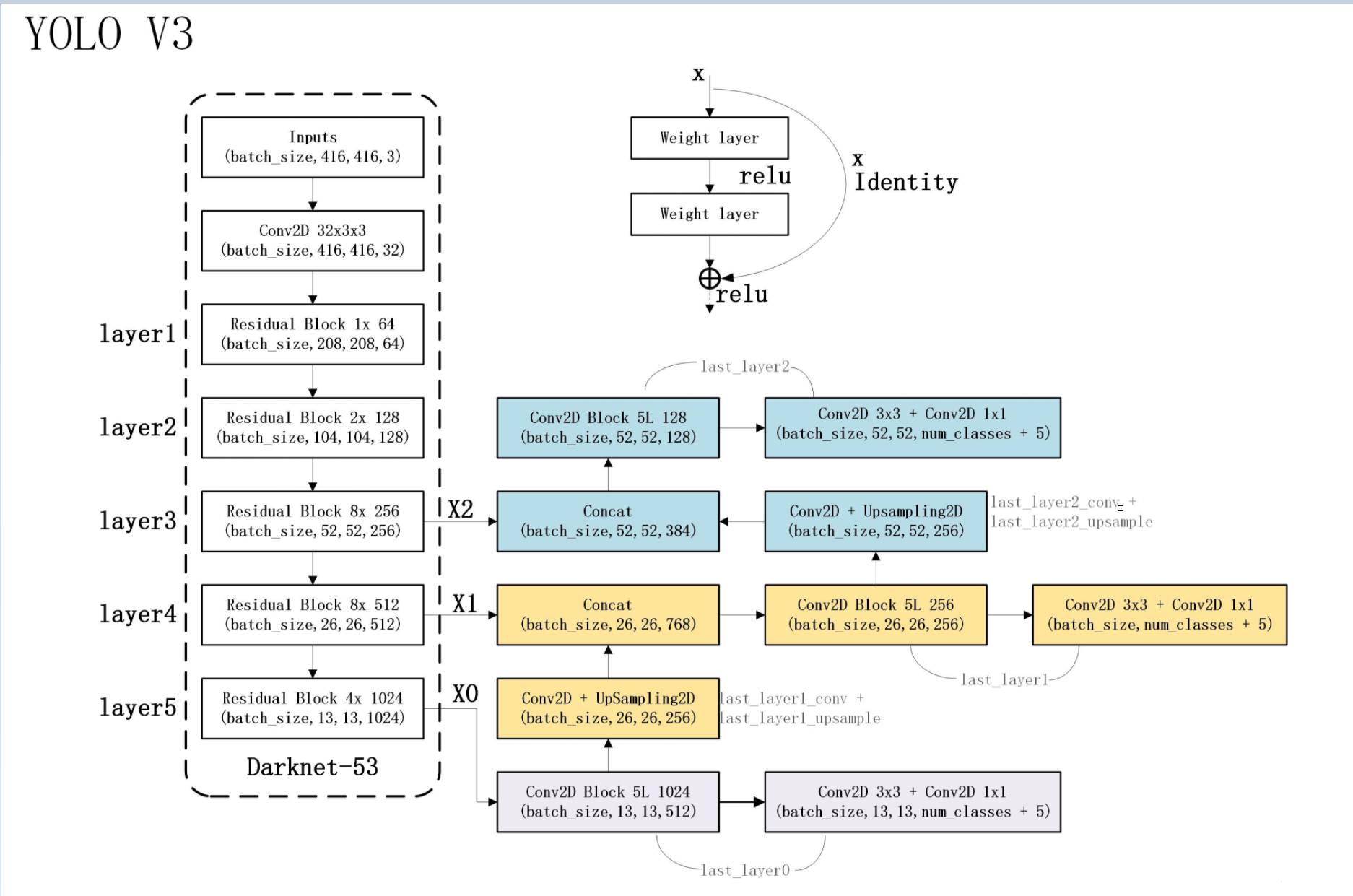
3. 网络优化
通过神经网络或者深度学习进行优化