文章目录
- 一、ESP8266简介
- 二、固件库烧录
- 三、常用AT指令
- 四、访问API
- 4.1 获取IP地址
- 4.2 GET天气信息
- 4.3 访问结果展示
- 五、实战项目
- 5.1 串口配置
- 5.2 检测WIFI模块连接状态
- 5.3 发送配置指令
- 5.4 解析天气信息
- 六、成果展示
一、ESP8266简介
ESP8266是嵌入式和物联网开发中常用的模块,它可以单独作为MCU使用,也可以作为一个简单的WIFI模块。ESP8266可以利用串口与单片机进行通讯。利用ESP8266可以访问一些API,获取天气信息或者完成网络授时,也可以连接云平台进行开发。
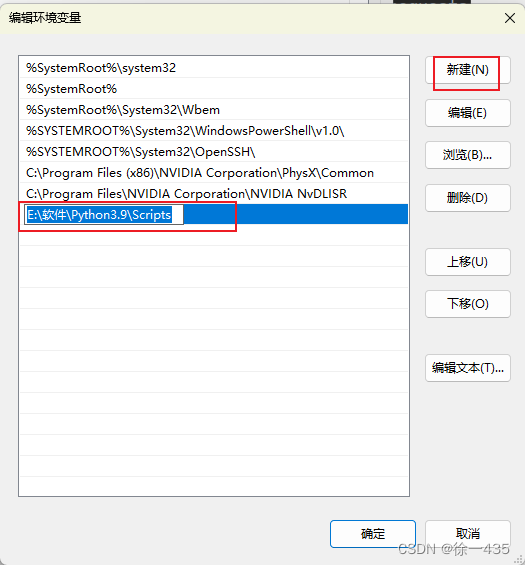
二、固件库烧录
有些新买来的ESP01-S并不能支持AT指令,需要我们手动烧录固件库。虽然烧录固件库有许多教程,但是博主烧录过两次,过程都不是特别顺利,这里专门整理一下烧录步骤,也方便后续使用。固件库和烧录软件可以联系卖家索要,这里就不再放链接了。
首先按照下表连接好引脚
| 引脚 | 连接 |
|---|---|
| 3.3V | 3.3V |
| RST | 3.3V |
| EN | 3.3V |
| IO2 | 3.3V |
| GND | GND |
| IO0 | GND |
| TXD | RXD |
| RXD | TXD |
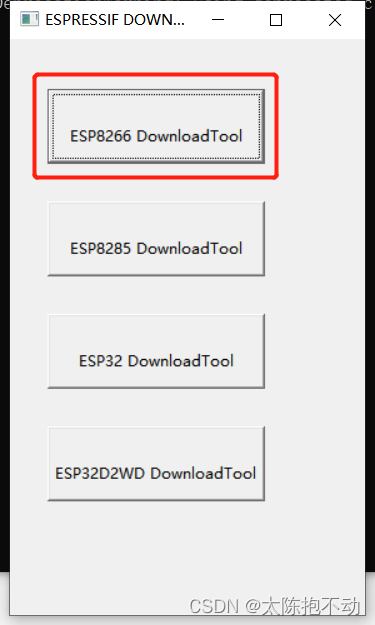
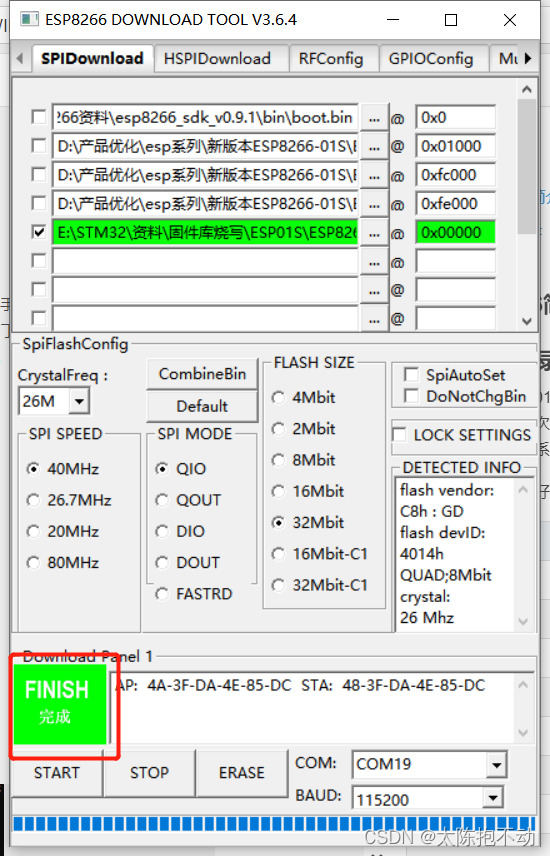
打开烧写软件,选择ESP8266
按照下图配置
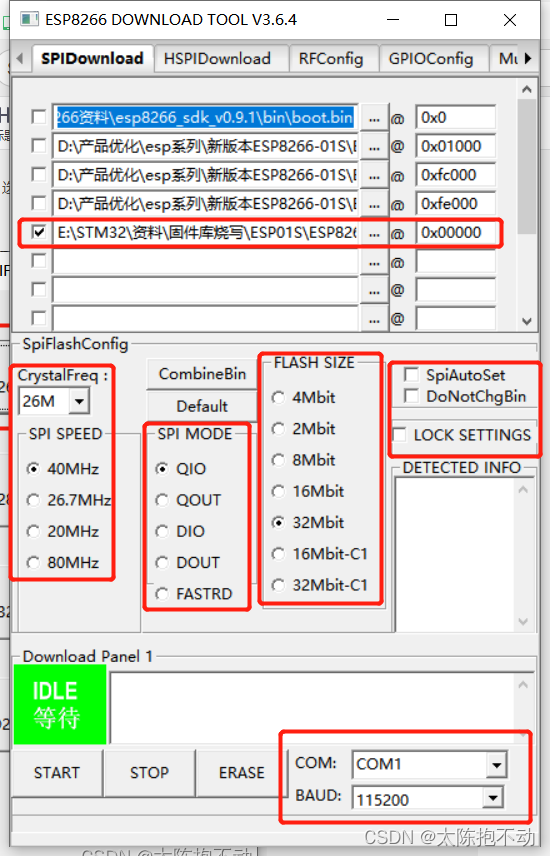
选择串口,点击“START”,烧写完成后关闭即可。
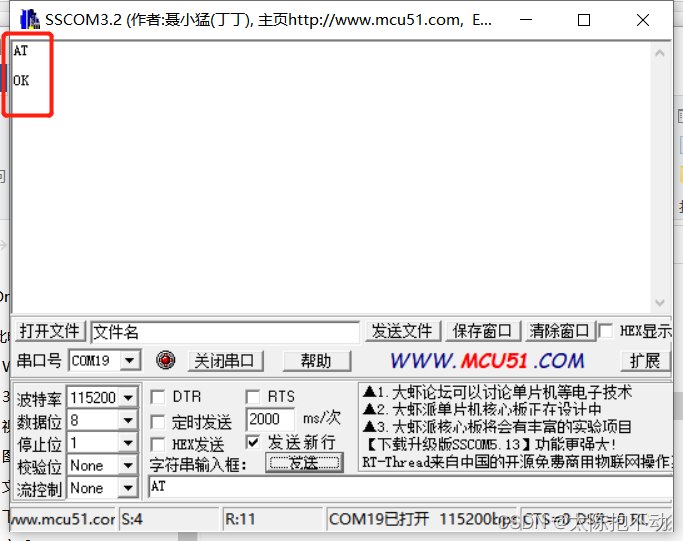
此时,拔掉IO0的接地,重新上电。打开串口调试助手检查烧录情况。打开串口调试助手,发送“AT”,换行加回车,观察返回信息。如果返回“OK”,说明烧录成功。
三、常用AT指令
下面简单介绍一些WIFI模块常用的AT指令
- AT\r\n
检查ESP8266模块连接是否正常 - AT+CWMODE=1\r\n
配置模块为Sta模式 - AT+CWJAP=“WIFI名称”,“WIFI密码”\r\n
连接指定WIFI - AT+CIPMUX=0\r\n
设置成单连接 - AT+CIPMODE=1\r\n
开启透传模式 - AT+CIPSTART=“TCP”,“203.119.175.194”,80\r\n
创建TCP连接
如何获取IP地址,后面会有介绍 - AT+CIPMODE=1\r\n
进入透传模式
进入到透传模式后AT指令就会失效,需要退出后才能生效 - AT+CIPSEND\r\n
准备向服务器发送请求,前面都成功的前提下发送完这个指令后会出现一个>,此时输入GET信息即可
四、访问API
下面以访问心知天气API为例,介绍一下利用WIFI模块访问API的流程。关于心知天气API的一些介绍,这里就不再赘述了。在开始下面的操作之前,需要先按照上面介绍的AT指令顺序,配置好WIFI模块。
4.1 获取IP地址
电脑win+R,输入ping api.seniverse.com,点击确定就可以获取到IP。

其中“116.62.81.138”就是IP地址。
4.2 GET天气信息
按照第三小节常用AT指令的输入顺序,连接WIFI,建立TCP连接。最后获取天气信息。获取天气信息时,输入以下内容
GET https://api.seniverse.com/v3/weather/now.json?key=你的密钥&location=beijing&language=zh-Hans&unit=c
4.3 访问结果展示
利用USB转TTL连接WIFI模块,利用串口调试助手发送AT指令,完成对心知天气API的访问。结果如下
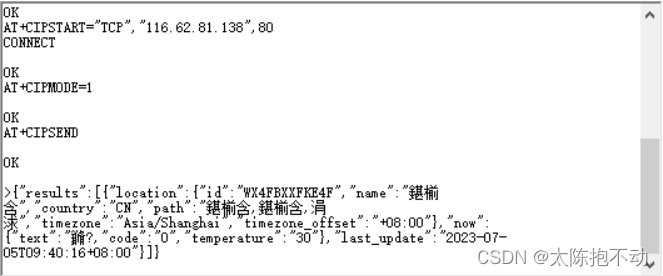
可以看到,虽然一些是乱码,但是能够接收到天气现象代码和温度。关于天气现象代码,心知天气的API文档里有介绍

后面还有很多,这里就不再列举了,具体可以去看看文档。
五、实战项目
下面就以利用WIFI模块,搭配STM32,访问心知天气API来获取天气和温度为例,展示一下WIFI的程序设计,仅供参考。该项目有以下功能
- 串口1与WIFI模块通信,能够检测WIFI连接是否正常
- 利用WIFI模块访问心知天气API,利用串口2将获取到的天气和温度打印到电脑
5.1 串口配置
这里需要用到两个串口。关于串口通信的相关内容这里就不再赘述了,详细可见博主的STM32速成笔记专栏串口通信篇。串口初始化程序如下
/**==============================================================================*函数名称:uart_init*函数功能:初始化USART*输入参数:UARTx:串口几;bound:波特率*返回值:无*备 注:可以修改成输入初始化哪个USART*==============================================================================*/
void uart_init(UART_TypeDef UARTx,u32 bound)
{// 相关结构体定义GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;switch (UARTx){case 0:// 使能USART1,GPIOA时钟RCC_APB2PeriphClockCmd (RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); // USART1_TX GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.9// USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.10 // Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ; // 抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能NVIC_Init(&NVIC_InitStructure); // 根据指定的参数初始化VIC寄存器// USART 初始化设置USART_InitStructure.USART_BaudRate = bound; // 串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位// 无硬件数据流控制USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式USART_Init(USART1, &USART_InitStructure); // 初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启串口接收中断USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); // 使能空闲中断USART_Cmd(USART1, ENABLE); // 使能串口1break;case 1:// 使能USART2,GPIOA时钟RCC_APB1PeriphClockCmd (RCC_APB1Periph_USART2 | RCC_APB2Periph_GPIOA, ENABLE); // USART2_TX GPIOA.2GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; // PA.2GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.2// USART2_RX GPIOA.3初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; // PA3GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.3 // Usart2 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ; // 抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能NVIC_Init(&NVIC_InitStructure); // 根据指定的参数初始化VIC寄存器// USART2 初始化设置USART_InitStructure.USART_BaudRate = bound; // 串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位// 无硬件数据流控制USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式USART_Init(USART2, &USART_InitStructure); // 初始化串口2USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); // 开启串口接收中断USART_ITConfig(USART2, USART_IT_IDLE, ENABLE); // 使能空闲中断USART_Cmd(USART2, ENABLE); // 使能串口2break;default:break;}
}
值得注意的是,串口2挂载在APB2上,开启串口2时钟时需要注意。博主最开始用错了开启时钟的函数,导致PA2引脚一直输出低电平。
printf用于串口1的输出,需要再定义一个串口发送函数
/**==============================================================================*函数名称:USART_Send*函数功能:串口发送函数*输入参数:str:要发送的数据的数组首地址;UARTx:串口几*返回值:无*备 注:调用前先将需要发送的内容利用sprintf()函数转换成字符串,再进行发送*==============================================================================*/
void USART_Send (UART_TypeDef UARTx,u8 *str)
{u8 index = 0;do{switch (UARTx){case 0:USART_SendData(USART1,str[index ++]);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);break;case 1:USART_SendData(USART2,str[index ++]);while (USART_GetFlagStatus(USART2,USART_FLAG_TXE) == RESET);break;}}while(str[index] != 0);
}
5.2 检测WIFI模块连接状态
检测原理十分简单,只需要利用串口1给WIFI模块发送“AT\r\n”,检测是否接收到“OK”。如果接收到“OK”,说明连接正常。如果没有接收到“OK”,说明连接异常。利用串口2输出连接状态。串口1给WIFI模块发送“AT”程序如下
u8 gOkFlag = 0; // 配置成功标志位/**==============================================================================*函数名称:Med_Esp8266_CheckLink*函数功能:检查ESP8266连接状态*输入参数:无*返回值:0:未连接;1:连接正常*备 注:一直发送AT,直到接收到OK*==============================================================================*/
u8 Med_Esp8266_CheckLink (void)
{while (!gOkFlag){// 发送AT,检查连接状态printf ("AT\r\n");delay_ms(100);return 0;}gOkFlag = 0; // 清零配置成功变量return 1;
}
一直循环发送,直到检测到返回的内容中有“OK”。串口1的接收中断函数和解析函数如下
/**==============================================================================*函数名称:USART1_IRQHandler*函数功能:USART1中断服务函数*输入参数:无*返回值:无*备 注:无*==============================================================================*/
u32 gReceCount = 0; // 接收计数变量
u32 gClearCount = 0; // 清空接收数组计数变量
u8 gReceFifo[1500]; // 接收数组
u8 gReceEndFlag = 0; // 接收完成标志位 void USART1_IRQHandler(void)
{if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收到一个字节 {gReceFifo[gReceCount++] = USART_ReceiveData(USART1);}else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) //接收到一帧数据{USART1->SR; // 先读SRUSART1->DR; // 再读DRgReceEndFlag = 1; // 接收完成标志置1 }
}
/**==============================================================================*函数名称:Uart_Rece_Pares*函数功能:解析串口接收内容*输入参数:无*返回值:无*备 注:无*==============================================================================*/
extern u8 gOkFlag; // 配置成功标志位void Uart_Rece_Pares(void) // 串口接收内容解析函数
{u16 tempVar = 0; // 临时循环变量if (gReceEndFlag == 1) // 如果接收完成{// 解析接收内容for (tempVar = 0;tempVar < gReceCount;tempVar ++){if (gReceFifo[tempVar] == 'O' && gReceFifo[tempVar + 1] == 'K'){gOkFlag = 1; // 成功标志位置1break;}}// 清空接收数组for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++){gReceFifo[gClearCount] = ' ';}gReceEndFlag = 0; // 清除接收完成标志位gReceCount = 0; // 清零接收计数变量}
}
上电后检查WIFI模块连接状态,串口2返回信息
u32 checkCunt = 0; // 检测连接状态计次变量Med_Mcu_Iint(); // 系统初始化// 检查ESP8266模块连接状态while (!Med_Esp8266_CheckLink()){checkCunt = checkCunt + 1; // 检测计数变量加1// 检测接收内容Uart_Rece_Pares();// 未连接if (checkCunt > 1){sprintf((char*)gString,"ESP8266未连接!\r\n");USART_Send(UART2,gString);delay_ms(500);}}sprintf((char*)gString,"ESP8266已连接!\r\n");USART_Send(UART2,gString);
5.3 发送配置指令
这里给出一个发送配置指令的函数,串口1给WIFI模块发送指令,串口2观察发送是否成功。
/**==============================================================================*函数名称:Med_Esp8266_CheckLink*函数功能:检查ESP8266连接状态*输入参数:str:要发送的指令*返回值:无*备 注:调用前先将需要发送的内容利用sprintf()函数转换成字符串串口1发送指令,串口2返回信息*==============================================================================*/
u8 gSendCunt = 0; // 记录发送次数void Med_Esp8266_SendCmd (u8 *str)
{u8 string[100];while (!gOkFlag){// 发送AT指令USART_Send(UART1,str);delay_ms(1000);gSendCunt = gSendCunt + 1; // 发送次数加1// 检测接收内容Uart_Rece_Pares();if (gSendCunt > 10){sprintf((char*)string,"%s指令发送失败!\r\n",str);USART_Send(UART2,string);}}sprintf((char*)string,"%s指令发送成功!\r\n",str);USART_Send(UART2,string);gSendCunt = 0; // 清零发送次数gOkFlag = 0; // 清零配置成功变量
}
配置步骤如下
// 配置模块为Sta模式sprintf((char*)gString,"AT+CWMODE=1\r\n");Med_Esp8266_SendCmd(gString);// 连接指定WIFIsprintf((char*)gString,"AT+CWJAP=\"ertu\",\"ertu201801101102\"\r\n");Med_Esp8266_SendCmd(gString);// 设置成单连接sprintf((char*)gString,"AT+CIPMUX=0\r\n");Med_Esp8266_SendCmd(gString);// 开启透传模式sprintf((char*)gString,"AT+CIPMODE=1\r\n");Med_Esp8266_SendCmd(gString);// 创建TCP连接sprintf((char*)gString,"AT+CIPSTART=\"TCP\",\"116.62.81.138\",80\r\n");Med_Esp8266_SendCmd(gString);// 进入透传模式sprintf((char*)gString,"AT+CIPMODE=1\r\n");Med_Esp8266_SendCmd(gString);// 准备向服务器发送请求sprintf((char*)gString,"AT+CIPSEND\r\n");Med_Esp8266_SendCmd(gString);
5.4 解析天气信息
接下来就是向服务器请求天气信息,然后解析。需要修改一下串口接收内容的解析函数,接收到“code”认为天气信息获取成功,解析并返回天气信息。
/**==============================================================================*函数名称:Uart_Rece_Pares*函数功能:解析串口接收内容*输入参数:无*返回值:无*备 注:无*==============================================================================*/
extern u8 gOkFlag; // 配置成功标志位void Uart_Rece_Pares(void) // 串口接收内容解析函数
{u16 tempVar = 0; // 临时循环变量u8 string[100]; // 串口打印数组if (gReceEndFlag == 1) // 如果接收完成{// 解析接收内容for (tempVar = 0;tempVar < gReceCount;tempVar ++){if (gReceFifo[tempVar] == 'O' && gReceFifo[tempVar + 1] == 'K'){gOkFlag = 1; // 成功标志位置1break;}// 接收到API返回结果// 针对心知天气APIif (gReceFifo[tempVar] == 'c' && gReceFifo[tempVar + 1] == 'o' && gReceFifo[tempVar + 2] == 'd'&& gReceFifo[tempVar + 3] == 'e'){sprintf((char*)string,"天气信息获取成功\r\n");USART_Send(UART2,string);// 提取天气信息sprintf((char*)string,"天气现象代码:%c 温度:%c%c℃\r\n",gReceFifo[tempVar + 7],gReceFifo[tempVar + 25],gReceFifo[tempVar + 26]);USART_Send(UART2,string);break;}}// 清空接收数组for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++){gReceFifo[gClearCount] = ' ';}gReceEndFlag = 0; // 清除接收完成标志位gReceCount = 0; // 清零接收计数变量}
}
六、成果展示

总结来看,博主对于ESP8266的指令发送函数比较满意,但是由于博主能力有限,这些仅供参考。