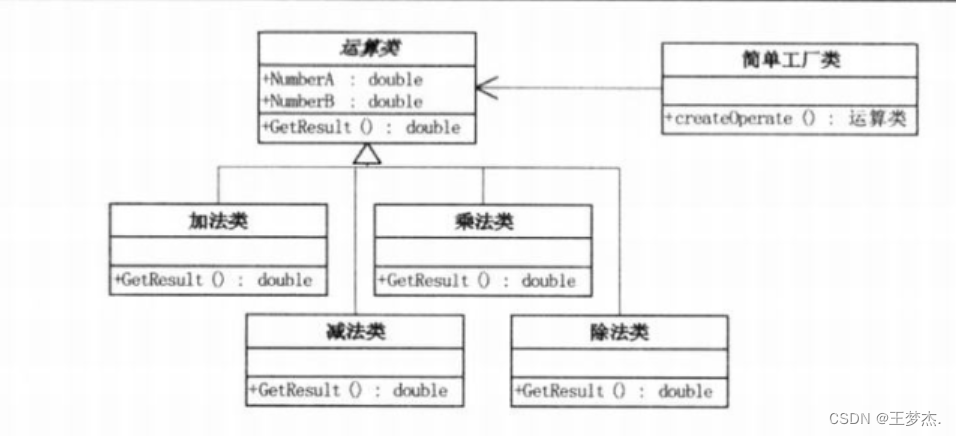
可以看到ReentrantLock提供了两个同步器,实现公平锁和非公平锁,都继承自AQS。
默认是非公平锁!

下面是对ReentrantLock 的源码解析:
加锁源码
// Sync 继承自 AQS
static final class NonfairSync extends Sync {private static final long serialVersionUID = 7316153563782823691L;// 加锁实现final void lock() {// 首先用 cas 尝试(仅尝试一次)将 state 从 0 改为 1, 如果成功表示获得了独占锁if (compareAndSetState(0, 1))setExclusiveOwnerThread(Thread.currentThread());else// 如果尝试失败,进入 ㈠acquire(1);}// ㈠ AQS 继承过来的方法, 方便阅读, 放在此处public final void acquire(int arg) {// ㈡ tryAcquireif (!tryAcquire(arg) &&// 当 tryAcquire 返回为 false 时, 先调用 addWaiter ㈣, 接着 acquireQueued ㈤acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) {selfInterrupt();}}// ㈡ 进入 ㈢protected final boolean tryAcquire(int acquires) {return nonfairTryAcquire(acquires);}// ㈢ Sync 继承过来的方法, 方便阅读, 放在此处final boolean nonfairTryAcquire(int acquires) {final Thread current = Thread.currentThread();int c = getState();// 如果还没有获得锁if (c == 0) {// 尝试用 cas 获得, 这里体现了非公平性: 不去检查 AQS 队列if (compareAndSetState(0, acquires)) {setExclusiveOwnerThread(current);return true;}}// 如果已经获得了锁, 线程还是当前线程, 表示发生了锁重入else if (current == getExclusiveOwnerThread()) {// state++int nextc = c + acquires;if (nextc < 0) // overflowthrow new Error("Maximum lock count exceeded");setState(nextc);return true;}// 获取失败, 回到调用处return false;}// ㈣ AQS 继承过来的方法, 方便阅读, 放在此处private Node addWaiter(Node mode) {
// 将当前线程关联到一个 Node 对象上, 模式为独占模式,新建的Node的waitstatus默认为0,因为waitstatus是成员变量,默认被初始化为0Node node = new Node(Thread.currentThread(), mode);// 如果 tail 不为 null, cas 尝试将 Node 对象加入 AQS 队列尾部Node pred = tail;if (pred != null) {node.prev = pred;if (compareAndSetTail(pred, node)) {// 双向链表pred.next = node;return node;}}//如果tail为null,尝试将 Node 加入 AQS, 进入 ㈥enq(node);return node;}// ㈥ AQS 继承过来的方法, 方便阅读, 放在此处private Node enq(final Node node) {for (;;) {Node t = tail;if (t == null) {// 还没有, 设置 head 为哨兵节点(不对应线程,状态为 0)if (compareAndSetHead(new Node())) {tail = head;}} else {// cas 尝试将 Node 对象加入 AQS 队列尾部node.prev = t;if (compareAndSetTail(t, node)) {t.next = node;return t;}}}}// ㈤ AQS 继承过来的方法, 方便阅读, 放在此处final boolean acquireQueued(final Node node, int arg) {boolean failed = true;try {boolean interrupted = false;for (;;) {final Node p = node.predecessor();// 上一个节点是 head, 表示轮到自己(当前线程对应的 node)了, 尝试获取if (p == head && tryAcquire(arg)) {// 获取成功, 设置自己(当前线程对应的 node)为 headsetHead(node);// 上一个节点 help GCp.next = null;failed = false;// 返回中断标记 falsereturn interrupted;}if (// 判断是否应当 park, 进入 ㈦shouldParkAfterFailedAcquire(p, node) &&// park 等待, 此时 Node 的状态被置为 Node.SIGNAL ㈧parkAndCheckInterrupt()) {interrupted = true;}}} finally {if (failed)cancelAcquire(node);}}// ㈦ AQS 继承过来的方法, 方便阅读, 放在此处private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {// 获取上一个节点的状态int ws = pred.waitStatus;if (ws == Node.SIGNAL) {// 上一个节点都在阻塞, 那么自己也阻塞好了return true;}// > 0 表示取消状态if (ws > 0) {// 上一个节点取消, 那么重构删除前面所有取消的节点, 返回到外层循环重试do {node.prev = pred = pred.prev;} while (pred.waitStatus > 0);pred.next = node;} else {// 这次还没有阻塞// 但下次如果重试不成功, 则需要阻塞,这时需要设置上一个节点状态为 Node.SIGNALcompareAndSetWaitStatus(pred, ws, Node.SIGNAL);}return false;}// ㈧ 阻塞当前线程private final boolean parkAndCheckInterrupt() {LockSupport.park(this);return Thread.interrupted();}
}
解锁源码
// Sync 继承自 AQS
static final class NonfairSync extends Sync {// 解锁实现public void unlock() {sync.release(1);}// AQS 继承过来的方法, 方便阅读, 放在此处public final boolean release(int arg) {// 尝试释放锁, 进入 ㈠if (tryRelease(arg)) {// 队列头节点 unparkNode h = head;if (// 队列不为 nullh != null &&// waitStatus == Node.SIGNAL 才需要 unparkh.waitStatus != 0) {// unpark AQS 中等待的线程, 进入 ㈡unparkSuccessor(h);}return true;}return false;}// ㈠ Sync 继承过来的方法, 方便阅读, 放在此处protected final boolean tryRelease(int releases) {// state--int c = getState() - releases;if (Thread.currentThread() != getExclusiveOwnerThread())throw new IllegalMonitorStateException();boolean free = false;// 支持锁重入, 只有 state 减为 0, 才释放成功if (c == 0) {free = true;setExclusiveOwnerThread(null);}setState(c);return free;}// ㈡ AQS 继承过来的方法, 方便阅读, 放在此处private void unparkSuccessor(Node node) {// 如果状态为 Node.SIGNAL 尝试重置状态为 0, 如果线程获取到了锁那么后来头结点会被抛弃掉// 不成功也可以int ws = node.waitStatus;if (ws < 0) {compareAndSetWaitStatus(node, ws, 0);}// 找到需要 unpark 的节点, 但本节点从 AQS 队列中脱离, 是由唤醒节点完成的Node s = node.next;// 不考虑已取消的节点, 从 AQS 队列从后至前找到队列最前面需要 unpark 的节点if (s == null || s.waitStatus > 0) {s = null;for (Node t = tail; t != null && t != node; t = t.prev)if (t.waitStatus <= 0)s = t;}if (s != null)LockSupport.unpark(s.thread);}
}
2. 可重入原理
static final class NonfairSync extends Sync {// ...// Sync 继承过来的方法, 方便阅读, 放在此处final boolean nonfairTryAcquire(int acquires) {final Thread current = Thread.currentThread();int c = getState();if (c == 0) {if (compareAndSetState(0, acquires)) {setExclusiveOwnerThread(current);return true;}}// 如果已经获得了锁, 线程还是当前线程, 表示发生了锁重入else if (current == getExclusiveOwnerThread()) {// state++int nextc = c + acquires;if (nextc < 0) // overflowthrow new Error("Maximum lock count exceeded");setState(nextc);return true;}return false;}// Sync 继承过来的方法, 方便阅读, 放在此处protected final boolean tryRelease(int releases) {// state--int c = getState() - releases;if (Thread.currentThread() != getExclusiveOwnerThread())throw new IllegalMonitorStateException();boolean free = false;// 支持锁重入, 只有 state 减为 0, 才释放成功if (c == 0) {free = true;setExclusiveOwnerThread(null);}setState(c);return free;}
}3. 可打断原理
不可打断模式:在此模式下,即使它被打断,仍会驻留在 AQS 队列中,一直要等到获得锁后方能得知自己被打断了
// Sync 继承自 AQS
static final class NonfairSync extends Sync {// ...private final boolean parkAndCheckInterrupt() {// 如果打断标记已经是 true, 则 park 会失效LockSupport.park(this);// interrupted 会清除打断标记return Thread.interrupted();}final boolean acquireQueued(final Node node, int arg) {boolean failed = true;try {boolean interrupted = false;for (;;) {final Node p = node.predecessor();if (p == head && tryAcquire(arg)) {setHead(node);p.next = null;failed = false;// 还是需要获得锁后, 才能返回打断状态return interrupted;}if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt()) {// 如果是因为 interrupt 被唤醒, 返回打断状态为 trueinterrupted = true;}}} finally {if (failed)cancelAcquire(node);}}public final void acquire(int arg) {if (!tryAcquire(arg) &&acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) {// 如果打断状态为 trueselfInterrupt();}}static void selfInterrupt() {// 重新产生一次中断,这时候线程是如果正常运行的状态,那么不是出于sleep等状态,interrupt方法就不会报错Thread.currentThread().interrupt();}
}
}
可打断模式
static final class NonfairSync extends Sync {public final void acquireInterruptibly(int arg) throws InterruptedException {if (Thread.interrupted())throw new InterruptedException();// 如果没有获得到锁, 进入 ㈠if (!tryAcquire(arg))doAcquireInterruptibly(arg);}// ㈠ 可打断的获取锁流程private void doAcquireInterruptibly(int arg) throws InterruptedException {final Node node = addWaiter(Node.EXCLUSIVE);boolean failed = true;try {for (;;) {final Node p = node.predecessor();if (p == head && tryAcquire(arg)) {setHead(node);p.next = null; // help GCfailed = false;return;}if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt()) {// 在 park 过程中如果被 interrupt 会进入此// 这时候抛出异常, 而不会再次进入 for (;;)throw new InterruptedException();}}} finally {if (failed)cancelAcquire(node);}}
}4. 公平锁实现原理
static final class FairSync extends Sync {private static final long serialVersionUID = -3000897897090466540L;final void lock() {acquire(1);}// AQS 继承过来的方法, 方便阅读, 放在此处public final void acquire(int arg) {if (!tryAcquire(arg) &&acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) {selfInterrupt();}}// 与非公平锁主要区别在于 tryAcquire 方法的实现protected final boolean tryAcquire(int acquires) {final Thread current = Thread.currentThread();int c = getState();if (c == 0) {// 先检查 AQS 队列中是否有前驱节点, 没有才去竞争if (!hasQueuedPredecessors() &&compareAndSetState(0, acquires)) {setExclusiveOwnerThread(current);return true;}}else if (current == getExclusiveOwnerThread()) {int nextc = c + acquires;if (nextc < 0)throw new Error("Maximum lock count exceeded");setState(nextc);return true;}return false;}// ㈠ AQS 继承过来的方法, 方便阅读, 放在此处public final boolean hasQueuedPredecessors() {Node t = tail;Node h = head;Node s;// h != t 时表示队列中有 Nodereturn h != t &&(// (s = h.next) == null 表示队列中还有没有老二(s = h.next) == null || // 或者队列中老二线程不是此线程s.thread != Thread.currentThread());}
}![[C++网络协议] I/O复用](https://img-blog.csdnimg.cn/d22f8d10458843d7bd191fa39e8de729.png)