相机跟随和瞄准行为

Transposer:虚拟相机将在某个固定的偏移或距离上跟随目标移动

上面的偏移量就是Follow Offset
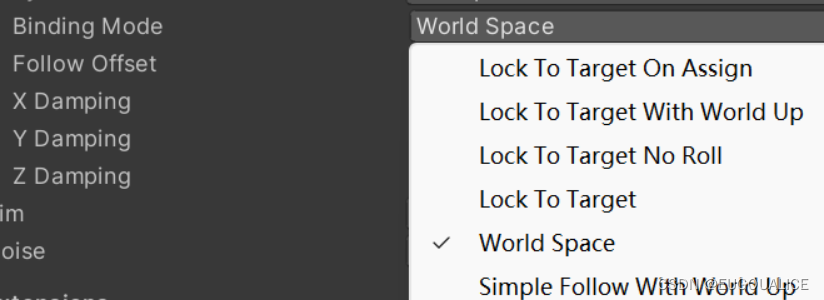
Binding Mode决定Follow Offset是目标本地坐标系下的身后十米还是世界坐标系下的身后十米
-
Lock To Target On Assign:锁定自己和目标本地坐标系的距离,朝向和目标本地坐标系方向相同
-
World Space:此时的坐标指的是世界坐标系下的坐标而不是Follow目标本地坐标。被锁定在沿在世界坐标系下Follow的位置然后进行跟随
-
Lock To Target With World Up:绕目标的偏航轴旋转,但是相机自己的旋转是不会变化的

Yaw Damping:设置相机绕目标旋转的延迟程度
设置绕旋转轴与俯仰轴的旋转延迟
-
Lock To Target:可以绕着三个轴旋转偏航轴、俯仰轴、横滚轴旋转
Angular Damping Mode:
-
Euler:欧拉角,可以自己设置三个轴的延迟程度
-
Quaternion:四元数,同一设置三个轴

-

这里所有的旋转都不是指虚拟相机自身的旋转而是绕着Follow目标的旋转
控制虚拟相机自身Rotation的是Look At和Aim,Follow 和Body只会影响Position