文章目录
- 一、目标检测介绍
- 二、YOLOv8介绍
- 三、源码获取
- 四、环境搭建
- 4.1 环境检测
- 五、数据集准备
- 六、 模型训练
- 6.1 方式一
- 6.2 方式二
- 6.3 针对其他任务
- 七、模型验证
- 八、模型测试
- 九、模型转换
- 9.1 转onnx
- 9.1.1 方式一
- 9.2 转tensorRT
- 9.2.1 trtexec
- 9.2.2 代码转换
- 9.2.3 推理代码
一、目标检测介绍
目标检测(Object Detection)是计算机视觉领域的一项重要技术,旨在识别图像或视频中的特定目标并确定其位置。通过训练深度学习模型,如卷积神经网络(CNN),可以实现对各种目标的精确检测。常见的目标检测任务包括:人脸检测、行人检测、车辆检测等。目标检测在安防监控、自动驾驶、智能零售等领域具有广泛应用前景。
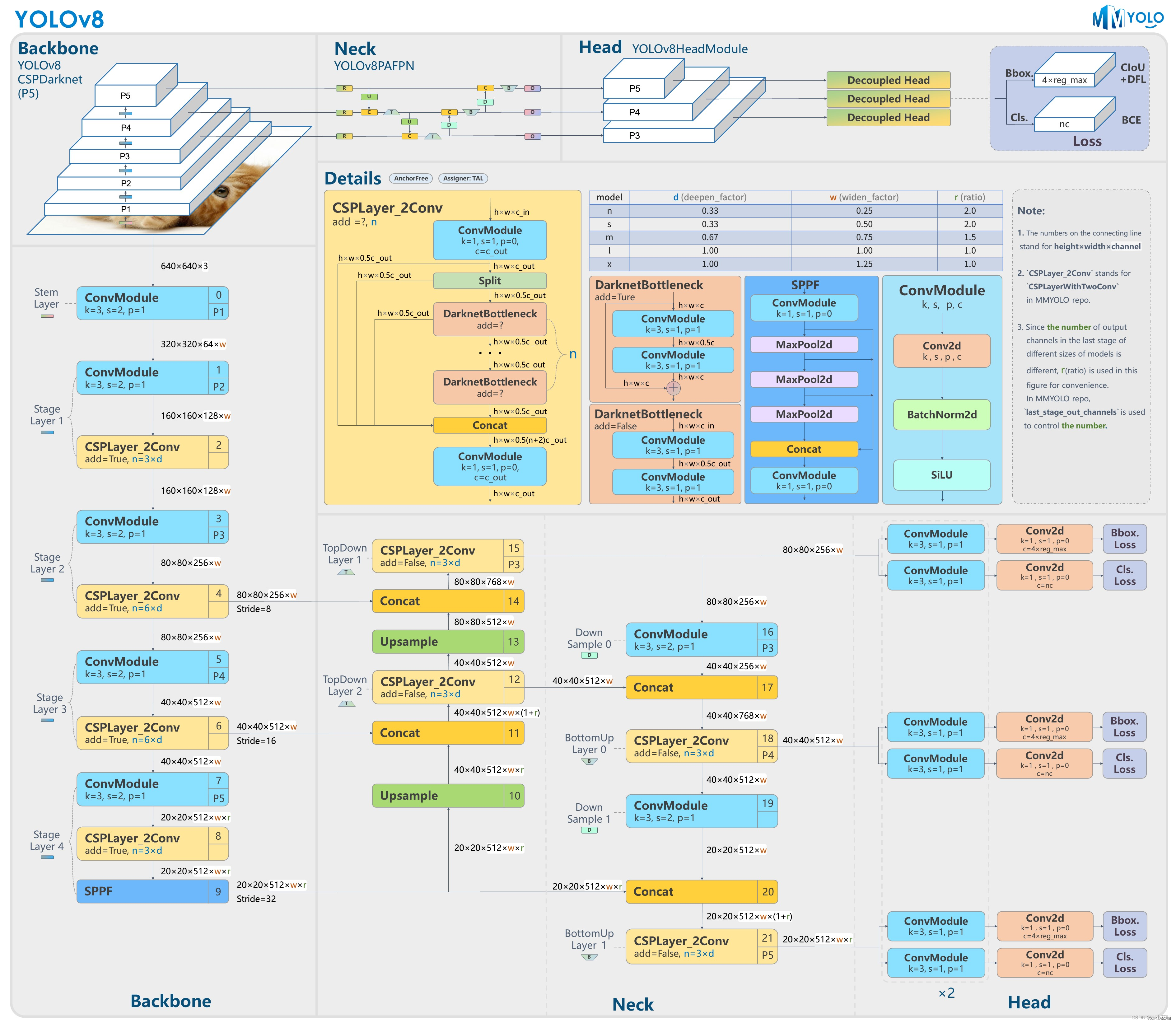
二、YOLOv8介绍
YOLOv8 是 Ultralytics 公司在 2023 年 1月 10 号开源的 YOLOv5 的下一个重大更新版本,目前支持图像分类、物体检测和实例分割任务,在还没有开源时就收到了用户的广泛关注。YOLOv8 抛弃了前几代模型的 Anchor-Base,提供了一个全新的 SOTA 模型,包括 P5 640 和 P6 1280 分辨率的目标检测网络和基于 YOLACT 的实例分割模型。和 YOLOv5 一样,基于缩放系数也提供了 N/S/M/L/X 尺度的不同大小模型,用于处理不同大小的输入图像 。
三、源码获取
https://github.com/ultralytics/ultralytics
四、环境搭建
CPU环境安装
conda create -n YOLOv8 python==3.8.1
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
GPU环境安装
参考这个链接:点击
# 安装CUDA、CUDNN、Python、Pytorch、Torchvision 这里每个版本要相互对应
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
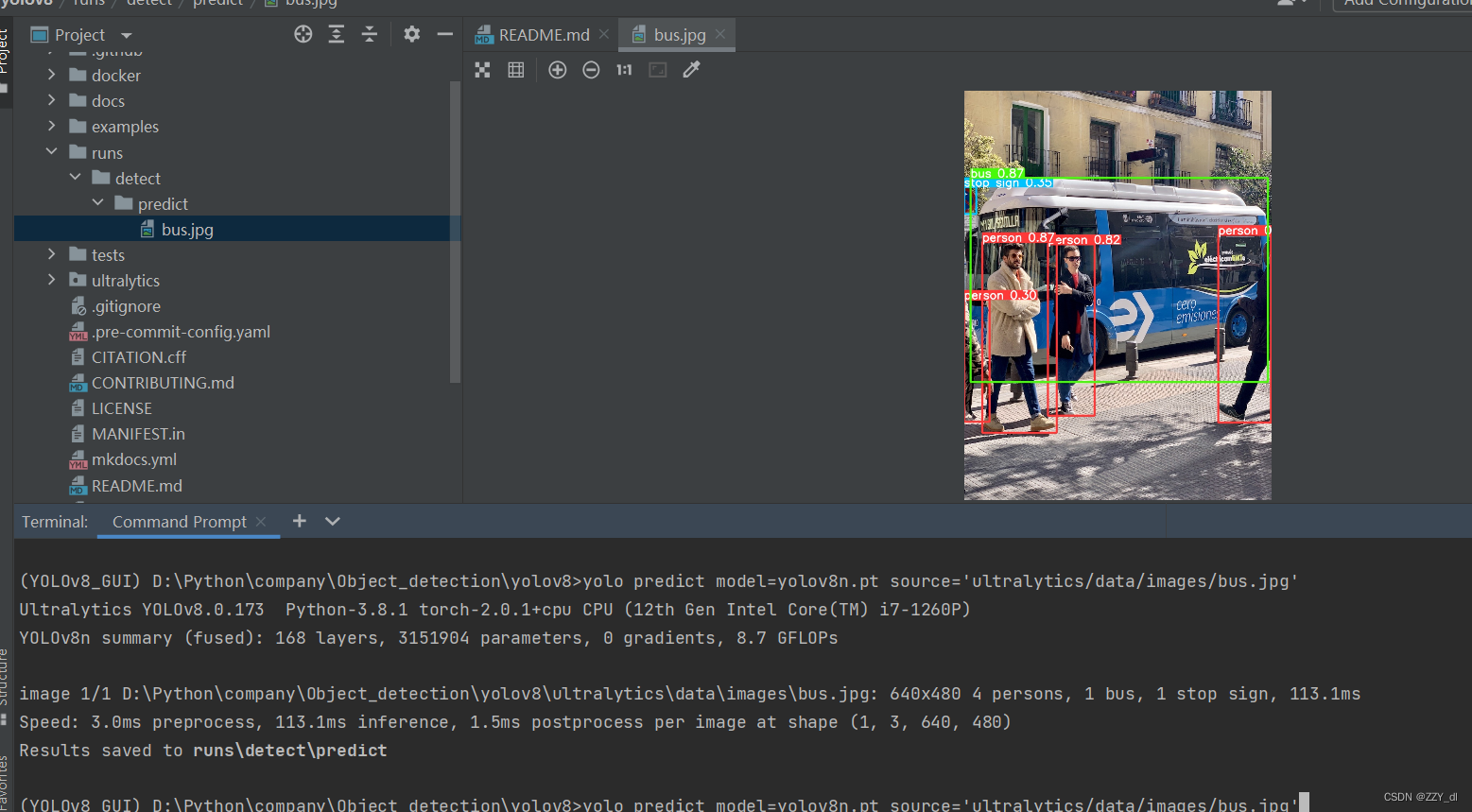
4.1 环境检测
下载yolov8n.pt和bus.jpg
然后命令行输入
yolo predict model=yolov8n.pt source='ultralytics/data/images/bus.jpg'
然后就会看到这个图片
五、数据集准备
这时候说明环境是没问题的了,我们可以准备数据集了,数据集的格式就是TXT标签加原图片,可参考YOLOv5这个博客:点击
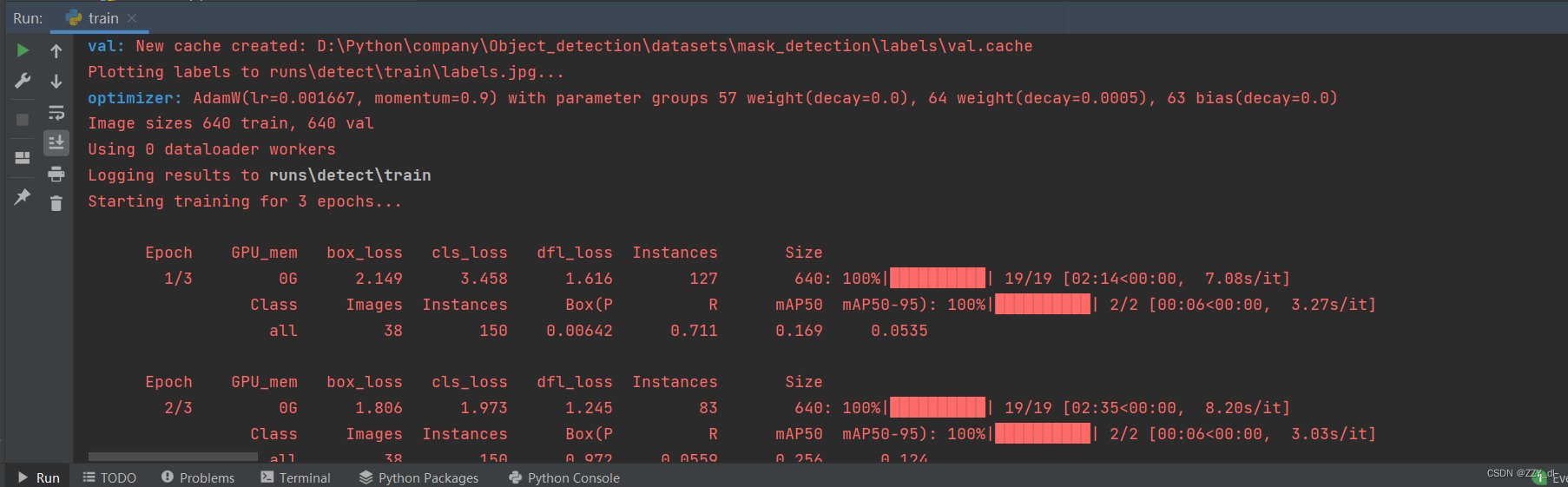
六、 模型训练
6.1 方式一
YOLO(“yolov8n.pt”) 表示用预训练模型
YOLO(“yolov8n.yaml”)表示正常训练
from ultralytics import YOLO# Load a model
# model = YOLO("yolov8n.yaml") # build a new model from scratch
model = YOLO("yolov8n.pt") # load a pretrained model (recommended for training)# Use the model
model.train(data="ultralytics/cfg/mask.yaml", epochs=3) # train the model
metrics = model.val() # evaluate model performance on the validation set
results = model("ultralytics/data/images/bus.jpg") # predict on an image
path = model.export(format="onnx") # export the model to ONNX format
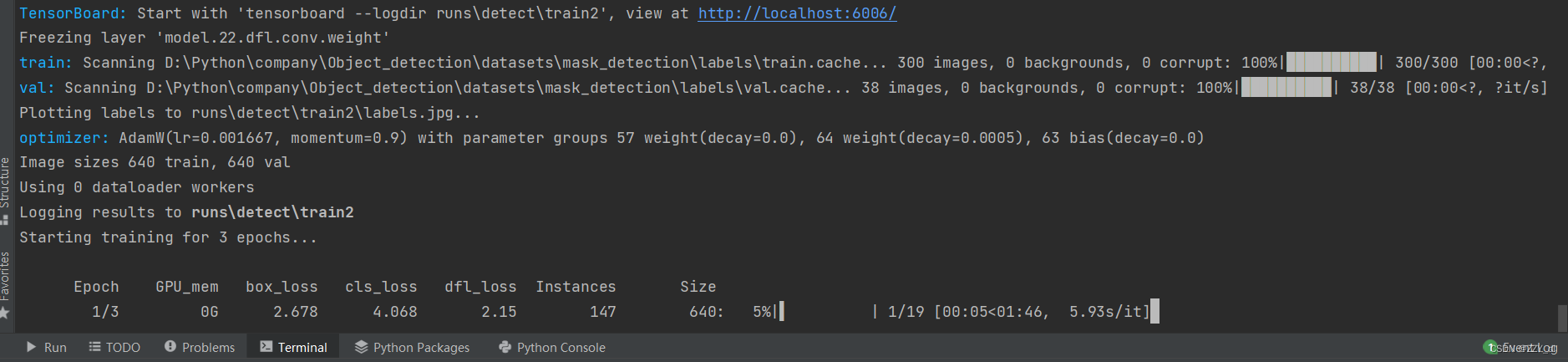
6.2 方式二
yolo task=detect mode=train model=yolov8n.pt data=ultralytics/cfg/mask.yaml epochs=3 batch=16
6.3 针对其他任务
包括四种:detect 、segment、classify 、pose
通过修改YOLO()导入正确任务的yaml配置文件,以及通过data来指定需要载入的对应任务的数据集即可。
这里的数据集我都是按照TXT标签和原图来进行划分的,具体格式如下:
from ultralytics import YOLO# Load a model
model = YOLO("ultralytics/cfg/models/v8/yolov8-seg.yaml") # build a new model from scratch# Use the model
model.train(data="ultralytics/cfg/custom_seg.yaml", epochs=3) # train the model
metrics = model.val() # evaluate model performance on the validation set
results = model("ultralytics/data/images/bus.jpg") # predict on an image
path = model.export(format="onnx") # export the model to ONNX format
针对实例分割任务也成功运行。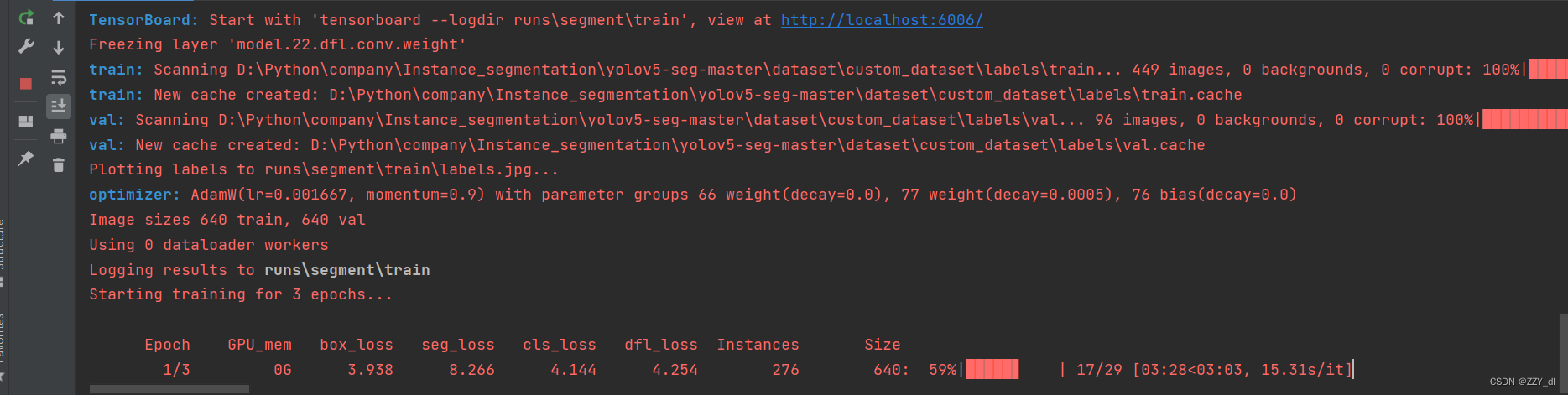
七、模型验证
yolo task=detect mode=val model=runs/detect/train/weights/best.pt data=ultralytics/cfg/mask.yaml device=cpu

八、模型测试
yolo task=detect mode=predict model=runs/detect/train/weights/best.pt source=ultralytics/data/images device=cpu

九、模型转换
9.1 转onnx
9.1.1 方式一
根据YOLOv8官网所给代码来实现
yolo export model=yolov8s.pt format=onnx opset=12
其次,可以通过ultralytics API导出onnx模型,并同时将bbox解码器和NMS等后处理添加到onnx模型中。YOLOv8-TensorRT
python export-det.py \
--weights yolov8s.pt \
--iou-thres 0.65 \
--conf-thres 0.25 \
--topk 100 \
--opset 11 \
--sim \
--input-shape 1 3 640 640 \
--device cuda:0
9.2 转tensorRT
9.2.1 trtexec
最简单的方式是使用TensorRT的bin文件夹下的trtexec.exe可执行文件
trtexec.exe --onnx=best.onnx --saveEngine=best.engine --fp16
9.2.2 代码转换
代码链接:YOLOv8-TensorRT
python3 build.py \
--weights yolov8s.onnx \
--iou-thres 0.65 \
--conf-thres 0.25 \
--topk 100 \
--fp16 \
--device cuda:0
9.2.3 推理代码
参考博客:点击
"""
An example that uses TensorRT's Python api to make inferences.
"""
import ctypes
import os
import shutil
import random
import sys
import threading
import time
import cv2
import numpy as np
import pycuda.autoinit
import pycuda.driver as cuda
import tensorrt as trtCONF_THRESH = 0.5
IOU_THRESHOLD = 0.45
LEN_ALL_RESULT = 705600##42000 ##(20*20+40*40+80*80)*(num_cls+4) 一个batch长度
NUM_CLASSES = 80 ##1
OBJ_THRESH = 0.4def get_img_path_batches(batch_size, img_dir):ret = []batch = []for root, dirs, files in os.walk(img_dir):for name in files:if len(batch) == batch_size:ret.append(batch)batch = []batch.append(os.path.join(root, name))if len(batch) > 0:ret.append(batch)return retdef plot_one_box(x, img, color=None, label=None, line_thickness=None):"""description: Plots one bounding box on image img,this function comes from YoLov5 project.param:x: a box likes [x1,y1,x2,y2]img: a opencv image objectcolor: color to draw rectangle, such as (0,255,0)label: strline_thickness: intreturn:no return"""tl = (line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1) # line/font thicknesscolor = color or [random.randint(0, 255) for _ in range(3)]c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)if label:tf = max(tl - 1, 1) # font thicknesst_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filledcv2.putText(img,label,(c1[0], c1[1] - 2),0,tl / 3,[225, 255, 255],thickness=tf,lineType=cv2.LINE_AA,)class YoLov8TRT(object):"""description: A YOLOv5 class that warps TensorRT ops, preprocess and postprocess ops."""def __init__(self, engine_file_path):# Create a Context on this device,self.ctx = cuda.Device(0).make_context()stream = cuda.Stream()TRT_LOGGER = trt.Logger(trt.Logger.INFO)runtime = trt.Runtime(TRT_LOGGER)# Deserialize the engine from filewith open(engine_file_path, "rb") as f:engine = runtime.deserialize_cuda_engine(f.read())context = engine.create_execution_context()host_inputs = []cuda_inputs = []host_outputs = []cuda_outputs = []bindings = []for binding in engine:print('bingding:', binding, engine.get_tensor_shape(binding))size = trt.volume(engine.get_tensor_shape(binding)) * engine.max_batch_sizedtype = trt.nptype(engine.get_tensor_dtype(binding))# Allocate host and device buffershost_mem = cuda.pagelocked_empty(size, dtype)cuda_mem = cuda.mem_alloc(host_mem.nbytes)# Append the device buffer to device bindings.bindings.append(int(cuda_mem))# Append to the appropriate list.if engine.binding_is_input(binding):self.input_w = engine.get_tensor_shape(binding)[-1]self.input_h = engine.get_tensor_shape(binding)[-2]host_inputs.append(host_mem)cuda_inputs.append(cuda_mem)else:host_outputs.append(host_mem)cuda_outputs.append(cuda_mem)# Storeself.stream = streamself.context = contextself.engine = engineself.host_inputs = host_inputsself.cuda_inputs = cuda_inputsself.host_outputs = host_outputsself.cuda_outputs = cuda_outputsself.bindings = bindingsself.batch_size = engine.max_batch_sizedef infer(self, raw_image_generator):threading.Thread.__init__(self)# Make self the active context, pushing it on top of the context stack.self.ctx.push()# Restorestream = self.streamcontext = self.contextengine = self.enginehost_inputs = self.host_inputscuda_inputs = self.cuda_inputshost_outputs = self.host_outputscuda_outputs = self.cuda_outputsbindings = self.bindings# Do image preprocessbatch_image_raw = []batch_origin_h = []batch_origin_w = []batch_input_image = np.empty(shape=[self.batch_size, 3, self.input_h, self.input_w])for i, image_raw in enumerate(raw_image_generator):input_image, image_raw, origin_h, origin_w = self.preprocess_image(image_raw)batch_image_raw.append(image_raw)batch_origin_h.append(origin_h)batch_origin_w.append(origin_w)np.copyto(batch_input_image[i], input_image)batch_input_image = np.ascontiguousarray(batch_input_image)# Copy input image to host buffernp.copyto(host_inputs[0], batch_input_image.ravel())start = time.time()# Transfer input data to the GPU.cuda.memcpy_htod_async(cuda_inputs[0], host_inputs[0], stream)# Run inference.context.execute_async_v2(bindings=bindings, stream_handle=stream.handle)# context.execute_async(batch_size=self.batch_size, bindings=bindings, stream_handle=stream.handle)# Transfer predictions back from the GPU.cuda.memcpy_dtoh_async(host_outputs[0], cuda_outputs[0], stream)# Synchronize the streamstream.synchronize()end = time.time()# Remove any context from the top of the context stack, deactivating it.self.ctx.pop()# Here we use the first row of output in that batch_size = 1output = host_outputs[0]# Do postprocessfor i in range(self.batch_size):result_boxes, result_scores, result_classid = self.post_process_new(output[i * LEN_ALL_RESULT: (i + 1) * LEN_ALL_RESULT], batch_origin_h[i], batch_origin_w[i],batch_input_image[i])if result_boxes is None:continue# Draw rectangles and labels on the original imagefor j in range(len(result_boxes)):box = result_boxes[j]plot_one_box(box,batch_image_raw[i],label="{}:{:.2f}".format(categories[int(result_classid[j])], result_scores[j]),)return batch_image_raw, end - startdef destroy(self):# Remove any context from the top of the context stack, deactivating it.self.ctx.pop()def get_raw_image(self, image_path_batch):"""description: Read an image from image path"""for img_path in image_path_batch:yield cv2.imread(img_path)def get_raw_image_zeros(self, image_path_batch=None):"""description: Ready data for warmup"""for _ in range(self.batch_size):yield np.zeros([self.input_h, self.input_w, 3], dtype=np.uint8)def preprocess_image(self, raw_bgr_image):"""description: Convert BGR image to RGB,resize and pad it to target size, normalize to [0,1],transform to NCHW format.param:input_image_path: str, image pathreturn:image: the processed imageimage_raw: the original imageh: original heightw: original width"""image_raw = raw_bgr_imageh, w, c = image_raw.shapeimage = cv2.cvtColor(image_raw, cv2.COLOR_BGR2RGB)# Calculate widht and height and paddingsr_w = self.input_w / wr_h = self.input_h / hif r_h > r_w:tw = self.input_wth = int(r_w * h)tx1 = tx2 = 0ty1 = int((self.input_h - th) / 2)ty2 = self.input_h - th - ty1else:tw = int(r_h * w)th = self.input_htx1 = int((self.input_w - tw) / 2)tx2 = self.input_w - tw - tx1ty1 = ty2 = 0# Resize the image with long side while maintaining ratioimage = cv2.resize(image, (tw, th))# Pad the short side with (128,128,128)image = cv2.copyMakeBorder(image, ty1, ty2, tx1, tx2, cv2.BORDER_CONSTANT, None, (128, 128, 128))image = image.astype(np.float32)# Normalize to [0,1]image /= 255.0# HWC to CHW format:image = np.transpose(image, [2, 0, 1])# CHW to NCHW formatimage = np.expand_dims(image, axis=0)# Convert the image to row-major order, also known as "C order":image = np.ascontiguousarray(image)return image, image_raw, h, wdef xywh2xyxy(self, origin_h, origin_w, x):"""description: Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-rightparam:origin_h: height of original imageorigin_w: width of original imagex: A boxes numpy, each row is a box [center_x, center_y, w, h]return:y: A boxes numpy, each row is a box [x1, y1, x2, y2]"""y = np.zeros_like(x)r_w = self.input_w / origin_wr_h = self.input_h / origin_hif r_h > r_w:y[:, 0] = x[:, 0] - x[:, 2] / 2y[:, 2] = x[:, 0] + x[:, 2] / 2y[:, 1] = x[:, 1] - x[:, 3] / 2 - (self.input_h - r_w * origin_h) / 2y[:, 3] = x[:, 1] + x[:, 3] / 2 - (self.input_h - r_w * origin_h) / 2y /= r_welse:y[:, 0] = x[:, 0] - x[:, 2] / 2 - (self.input_w - r_h * origin_w) / 2y[:, 2] = x[:, 0] + x[:, 2] / 2 - (self.input_w - r_h * origin_w) / 2y[:, 1] = x[:, 1] - x[:, 3] / 2y[:, 3] = x[:, 1] + x[:, 3] / 2y /= r_hreturn ydef post_process_new(self, output, origin_h, origin_w, img_pad):# Reshape to a two dimentional ndarrayc, h, w = img_pad.shaperatio_w = w / origin_wratio_h = h / origin_hnum_anchors = int(((h / 32) * (w / 32) + (h / 16) * (w / 16) + (h / 8) * (w / 8)))pred = np.reshape(output, (num_anchors, 4 + NUM_CLASSES))results = []for detection in pred:score = detection[4:]classid = np.argmax(score)confidence = score[classid]if confidence > CONF_THRESH:if ratio_h > ratio_w:center_x = int(detection[0] / ratio_w)center_y = int((detection[1] - (h - ratio_w * origin_h) / 2) / ratio_w)width = int(detection[2] / ratio_w)height = int(detection[3] / ratio_w)x1 = int(center_x - width / 2)y1 = int(center_y - height / 2)x2 = int(center_x + width / 2)y2 = int(center_y + height / 2)else:center_x = int((detection[0] - (w - ratio_h * origin_w) / 2) / ratio_h)center_y = int(detection[1] / ratio_h)width = int(detection[2] / ratio_h)height = int(detection[3] / ratio_h)x1 = int(center_x - width / 2)y1 = int(center_y - height / 2)x2 = int(center_x + width / 2)y2 = int(center_y + height / 2)results.append([x1, y1, x2, y2, confidence, classid])results = np.array(results)if len(results) <= 0:return None, None, None# Do nmsboxes = self.non_max_suppression(results, origin_h, origin_w, conf_thres=CONF_THRESH, nms_thres=IOU_THRESHOLD)result_boxes = boxes[:, :4] if len(boxes) else np.array([])result_scores = boxes[:, 4] if len(boxes) else np.array([])result_classid = boxes[:, 5] if len(boxes) else np.array([])return result_boxes, result_scores, result_classiddef bbox_iou(self, box1, box2, x1y1x2y2=True):"""description: compute the IoU of two bounding boxesparam:box1: A box coordinate (can be (x1, y1, x2, y2) or (x, y, w, h))box2: A box coordinate (can be (x1, y1, x2, y2) or (x, y, w, h))x1y1x2y2: select the coordinate formatreturn:iou: computed iou"""if not x1y1x2y2:# Transform from center and width to exact coordinatesb1_x1, b1_x2 = box1[:, 0] - box1[:, 2] / 2, box1[:, 0] + box1[:, 2] / 2b1_y1, b1_y2 = box1[:, 1] - box1[:, 3] / 2, box1[:, 1] + box1[:, 3] / 2b2_x1, b2_x2 = box2[:, 0] - box2[:, 2] / 2, box2[:, 0] + box2[:, 2] / 2b2_y1, b2_y2 = box2[:, 1] - box2[:, 3] / 2, box2[:, 1] + box2[:, 3] / 2else:# Get the coordinates of bounding boxesb1_x1, b1_y1, b1_x2, b1_y2 = box1[:, 0], box1[:, 1], box1[:, 2], box1[:, 3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[:, 0], box2[:, 1], box2[:, 2], box2[:, 3]# Get the coordinates of the intersection rectangleinter_rect_x1 = np.maximum(b1_x1, b2_x1)inter_rect_y1 = np.maximum(b1_y1, b2_y1)inter_rect_x2 = np.minimum(b1_x2, b2_x2)inter_rect_y2 = np.minimum(b1_y2, b2_y2)# Intersection areainter_area = np.clip(inter_rect_x2 - inter_rect_x1 + 1, 0, None) * \np.clip(inter_rect_y2 - inter_rect_y1 + 1, 0, None)# Union Areab1_area = (b1_x2 - b1_x1 + 1) * (b1_y2 - b1_y1 + 1)b2_area = (b2_x2 - b2_x1 + 1) * (b2_y2 - b2_y1 + 1)iou = inter_area / (b1_area + b2_area - inter_area + 1e-16)return ioudef non_max_suppression(self, prediction, origin_h, origin_w, conf_thres=0.5, nms_thres=0.4):"""description: Removes detections with lower object confidence score than 'conf_thres' and performsNon-Maximum Suppression to further filter detections.param:prediction: detections, (x1, y1,x2, y2, conf, cls_id)origin_h: original image heightorigin_w: original image widthconf_thres: a confidence threshold to filter detectionsnms_thres: a iou threshold to filter detectionsreturn:boxes: output after nms with the shape (x1, y1, x2, y2, conf, cls_id)"""# Get the boxes that score > CONF_THRESHboxes = prediction[prediction[:, 4] >= conf_thres]# Trandform bbox from [center_x, center_y, w, h] to [x1, y1, x2, y2]# boxes[:, :4] = self.xywh2xyxy(origin_h, origin_w, boxes[:, :4])# clip the coordinatesboxes[:, 0] = np.clip(boxes[:, 0], 0, origin_w)boxes[:, 2] = np.clip(boxes[:, 2], 0, origin_w)boxes[:, 1] = np.clip(boxes[:, 1], 0, origin_h)boxes[:, 3] = np.clip(boxes[:, 3], 0, origin_h)# Object confidenceconfs = boxes[:, 4]# Sort by the confsboxes = boxes[np.argsort(-confs)]# Perform non-maximum suppressionkeep_boxes = []while boxes.shape[0]:large_overlap = self.bbox_iou(np.expand_dims(boxes[0, :4], 0), boxes[:, :4]) > nms_threslabel_match = boxes[0, -1] == boxes[:, -1]# Indices of boxes with lower confidence scores, large IOUs and matching labelsinvalid = large_overlap & label_matchkeep_boxes += [boxes[0]]boxes = boxes[~invalid]boxes = np.stack(keep_boxes, 0) if len(keep_boxes) else np.array([])return boxesdef img_infer(yolov5_wrapper, image_path_batch):batch_image_raw, use_time = yolov5_wrapper.infer(yolov5_wrapper.get_raw_image(image_path_batch))for i, img_path in enumerate(image_path_batch):parent, filename = os.path.split(img_path)save_name = os.path.join('output', filename)# Save imagecv2.imwrite(save_name, batch_image_raw[i])print('input->{}, time->{:.2f}ms, saving into output/'.format(image_path_batch, use_time * 1000))def warmup(yolov5_wrapper):batch_image_raw, use_time = yolov5_wrapper.infer(yolov5_wrapper.get_raw_image_zeros())print('warm_up->{}, time->{:.2f}ms'.format(batch_image_raw[0].shape, use_time * 1000))if __name__ == "__main__":engine_file_path = r"D:\personal\workplace\python_code\ultralytics-main\yolov8s_p.engine"# load coco labelscategories = ["person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush" ]# engine_file_path = r'C:\Users\caobin\Desktop\model_version\yolov8\20230602\best.engine'# categories = ['man']if os.path.exists('output/'):shutil.rmtree('output/')os.makedirs('output/')# a YoLov5TRT instanceyolov8_wrapper = YoLov8TRT(engine_file_path)try:print('batch size is', yolov8_wrapper.batch_size)image_dir = r"D:\personal\workplace\python_code\yolov5-6.0\data\images"image_path_batches = get_img_path_batches(yolov8_wrapper.batch_size, image_dir)for i in range(10):warmup(yolov8_wrapper)for batch in image_path_batches:img_infer(yolov8_wrapper, batch)finally:yolov8_wrapper.destroy()