目录
- 环境
- 引脚连接
- 1.准备LWIP
- 2.新建arch
- 3.网卡驱动
- 4.新建分组
- 5.项目头文件路径
- 6.LWIIP头文件编写
- 7.ethernetif.c
- void low_level_init(struct netif *netif)
- err_t low_level_output(struct netif *netif, struct pbuf *p)`
- struct pbuf *low_level_input(struct netif *netif)
- void ethernetif_input(struct netif *netif)
- 8.sys_now
- 9.初始化函数
- 10.主函数
- 注意
- 测试
- 结果
- 源码
本文用于记录STM32F103VET6基于ENC28J60移植LWIP1.4.1。
有了ENC28J60与LWIP之后,网络5层里除了应用层都完成了。本文使用ping测试移植结果,不进行应用层开发。
按照本文移植成功的话,使用网线连接网卡与电脑,将电脑以太网IP设置在与网卡IP同一网段下,电脑应该可以ping通单片机。
网上要么是用μCOS3,要么STM32F4,要么不用这个网卡。笔者自学被搞得哇哇大叫。因此写本文记录过程。
笔者仅做移植记录,详细原理不做讲解。
环境
- STM32F103VET6(野火指南者)
- LWIP 1.4.1
- 网卡为ENC28J60
- 一根网线
引脚连接
PB1 — INT
GND — GND
PA4 — CS
PA5 — SCL
PA6 — SO
PA7 — SI
PE5 — RST
5V — VCC
1.准备LWIP
准备一个标准库项目,下载LWIP1.4.1源码。
源码下载好后,解压,复制其中的src目录,粘贴到项目路径下,更改路径名为LWIP。
点我下载
2.新建arch
在LWIP文件夹下,新建文件夹arch,并在其中新建三个文件:cc.h、lwipopts.h、perf.h备用。
3.网卡驱动
本文基于网卡ENC28J60。它的驱动代码我参考了 这位大佬的博客。
原来的驱动是HAL库编写的,我跑起来有问题。我把它改成标准库(其实也就改了SPI读写一字节那一块)却能直接跑了。
//enc28j60.c
#include "enc28j60.h"
static void ENC28J60_GPIO_Init(){RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOE,ENABLE);GPIO_InitTypeDef gpio_init;gpio_init.GPIO_Mode = GPIO_Mode_Out_PP;gpio_init.GPIO_Speed = GPIO_Speed_50MHz;gpio_init.GPIO_Pin = ENC28J60_CS_PIN;GPIO_Init(ENC28J60_CS_PORT,&gpio_init);gpio_init.GPIO_Pin = GPIO_Pin_5;GPIO_Init(GPIOE,&gpio_init);gpio_init.GPIO_Pin = GPIO_Pin_0;GPIO_Init(GPIOB,&gpio_init);gpio_init.GPIO_Pin = GPIO_Pin_5;gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOA,&gpio_init);gpio_init.GPIO_Pin = GPIO_Pin_6;GPIO_Init(GPIOA,&gpio_init);gpio_init.GPIO_Pin = GPIO_Pin_7;GPIO_Init(GPIOA,&gpio_init);GPIO_SetBits(ENC28J60_CS_PORT,ENC28J60_CS_PIN);GPIO_SetBits(GPIOB,GPIO_Pin_0);
}static void ENC28J60_SPI1_Init(){RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);SPI_InitTypeDef spi_init;spi_init.SPI_NSS = SPI_NSS_Soft;spi_init.SPI_Direction = SPI_Direction_2Lines_FullDuplex;spi_init.SPI_Mode = SPI_Mode_Master;spi_init.SPI_DataSize = SPI_DataSize_8b;spi_init.SPI_CPOL = SPI_CPOL_Low;spi_init.SPI_CPHA = SPI_CPHA_1Edge;spi_init.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;spi_init.SPI_FirstBit = SPI_FirstBit_MSB;spi_init.SPI_CRCPolynomial = 7;SPI_Init(SPI1,&spi_init);SPI_Cmd(SPI1,ENABLE);
}static void ENC28J60_EXTI_Init(){RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO,ENABLE);NVIC_InitTypeDef nvic_init;nvic_init.NVIC_IRQChannel = EXTI1_IRQn;nvic_init.NVIC_IRQChannelPreemptionPriority = 1;nvic_init.NVIC_IRQChannelSubPriority = 1;nvic_init.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&nvic_init);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);EXTI_InitTypeDef exti_init;exti_init.EXTI_Line = EXTI_Line1;exti_init.EXTI_Mode = EXTI_Mode_Interrupt;exti_init.EXTI_Trigger = EXTI_Trigger_Falling;exti_init.EXTI_LineCmd = ENABLE;EXTI_Init(&exti_init);GPIO_InitTypeDef gpio_init;gpio_init.GPIO_Mode = GPIO_Mode_IPU;gpio_init.GPIO_Pin = GPIO_Pin_1;gpio_init.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&gpio_init);
}static void ENC28J60_Reset(){GPIO_ResetBits(GPIOE,GPIO_Pin_5);uint16_t t = 0x1fff;while(t--);GPIO_SetBits(GPIOE,GPIO_Pin_5);
}static unsigned char W25Q64_SendByte(uint8_t byte){while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);SPI_I2S_SendData(SPI1,byte);while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE) == RESET);return SPI_I2S_ReceiveData(SPI1);
}static unsigned char SPI1_ReadWrite(unsigned char writedat){unsigned char r = W25Q64_SendByte(writedat);return r;
}void Enc28j60_Init(void)
{ENC28J60_GPIO_Init();ENC28J60_SPI1_Init();ENC28J60_EXTI_Init();ENC28J60_Reset();
}static unsigned char Enc28j60Bank;
static unsigned int NextPacketPtr;unsigned char enc28j60ReadOp(unsigned char op, unsigned char address)
{unsigned char dat = 0;ENC28J60_CSL();dat = op | (address & ADDR_MASK);SPI1_ReadWrite(dat);dat = SPI1_ReadWrite(0xFF);// do dummy read if needed (for mac and mii, see datasheet page 29)if(address & 0x80){dat = SPI1_ReadWrite(0xFF);}// release CSENC28J60_CSH();return dat;
}void enc28j60WriteOp(unsigned char op, unsigned char address, unsigned char data)
{unsigned char dat = 0;ENC28J60_CSL();// issue write commanddat = op | (address & ADDR_MASK);SPI1_ReadWrite(dat);// write datadat = data;SPI1_ReadWrite(dat);ENC28J60_CSH();
}void enc28j60ReadBuffer(unsigned int len, unsigned char* data)
{ENC28J60_CSL();// issue read commandSPI1_ReadWrite(ENC28J60_READ_BUF_MEM);while(len){len--;// read data*data = (unsigned char)SPI1_ReadWrite(0);data++;}*data='\0';ENC28J60_CSH();
}void enc28j60WriteBuffer(unsigned int len, unsigned char* data)
{ENC28J60_CSL();// issue write commandSPI1_ReadWrite(ENC28J60_WRITE_BUF_MEM);while(len){len--;SPI1_ReadWrite(*data);data++;}ENC28J60_CSH();
}void enc28j60SetBank(unsigned char address)
{// set the bank (if needed)if((address & BANK_MASK) != Enc28j60Bank){// set the bankenc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON1, (ECON1_BSEL1|ECON1_BSEL0));enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, (address & BANK_MASK)>>5);Enc28j60Bank = (address & BANK_MASK);}
}unsigned char enc28j60Read(unsigned char address)
{// set the bankenc28j60SetBank(address);// do the readreturn enc28j60ReadOp(ENC28J60_READ_CTRL_REG, address);
}void enc28j60Write(unsigned char address, unsigned char data)
{// set the bankenc28j60SetBank(address);// do the writeenc28j60WriteOp(ENC28J60_WRITE_CTRL_REG, address, data);
}void enc28j60PhyWrite(unsigned char address, unsigned int data)
{// set the PHY register addressenc28j60Write(MIREGADR, address);// write the PHY dataenc28j60Write(MIWRL, data);enc28j60Write(MIWRH, data>>8);// wait until the PHY write completeswhile(enc28j60Read(MISTAT) & MISTAT_BUSY){//Del_10us(1);//_nop_();}
}void enc28j60clkout(unsigned char clk)
{//setup clkout: 2 is 12.5MHz:enc28j60Write(ECOCON, clk & 0x7);
}void enc28j60Init(unsigned char* macaddr)
{ ENC28J60_CSH(); // perform system resetenc28j60WriteOp(ENC28J60_SOFT_RESET, 0, ENC28J60_SOFT_RESET);// check CLKRDY bit to see if reset is complete// The CLKRDY does not work. See Rev. B4 Silicon Errata point. Just wait.//while(!(enc28j60Read(ESTAT) & ESTAT_CLKRDY));// do bank 0 stuff// initialize receive buffer// 16-bit transfers, must write low byte first// set receive buffer start address NextPacketPtr = RXSTART_INIT;// Rx start enc28j60Write(ERXSTL, RXSTART_INIT&0xFF); enc28j60Write(ERXSTH, RXSTART_INIT>>8);// set receive pointer address enc28j60Write(ERXRDPTL, RXSTART_INIT&0xFF);enc28j60Write(ERXRDPTH, RXSTART_INIT>>8);// RX endenc28j60Write(ERXNDL, RXSTOP_INIT&0xFF);enc28j60Write(ERXNDH, RXSTOP_INIT>>8);// TX start 1500enc28j60Write(ETXSTL, TXSTART_INIT&0xFF);enc28j60Write(ETXSTH, TXSTART_INIT>>8);// TX endenc28j60Write(ETXNDL, TXSTOP_INIT&0xFF);enc28j60Write(ETXNDH, TXSTOP_INIT>>8);// do bank 1 stuff, packet filter:// For broadcast packets we allow only ARP packtets// All other packets should be unicast only for our mac (MAADR)//// The pattern to match on is therefore// Type ETH.DST// ARP BROADCAST// 06 08 -- ff ff ff ff ff ff -> ip checksum for theses bytes=f7f9// in binary these poitions are:11 0000 0011 1111// This is hex 303F->EPMM0=0x3f,EPMM1=0x30enc28j60Write(ERXFCON, ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN);enc28j60Write(EPMM0, 0x3f);enc28j60Write(EPMM1, 0x30);enc28j60Write(EPMCSL, 0xf9);enc28j60Write(EPMCSH, 0xf7); enc28j60Write(MACON1, MACON1_MARXEN|MACON1_TXPAUS|MACON1_RXPAUS);// bring MAC out of reset enc28j60Write(MACON2, 0x00);enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, MACON3, MACON3_PADCFG0|MACON3_TXCRCEN|MACON3_FRMLNEN|MACON3_FULDPX);// set inter-frame gap (non-back-to-back)enc28j60Write(MAIPGL, 0x12);enc28j60Write(MAIPGH, 0x0C);// set inter-frame gap (back-to-back)enc28j60Write(MABBIPG, 0x15);// Set the maximum packet size which the controller will accept// Do not send packets longer than MAX_FRAMELEN:enc28j60Write(MAMXFLL, MAX_FRAMELEN&0xFF); enc28j60Write(MAMXFLH, MAX_FRAMELEN>>8);// do bank 3 stuff// write MAC address// NOTE: MAC address in ENC28J60 is byte-backwardenc28j60Write(MAADR5, macaddr[0]); enc28j60Write(MAADR4, macaddr[1]);enc28j60Write(MAADR3, macaddr[2]);enc28j60Write(MAADR2, macaddr[3]);enc28j60Write(MAADR1, macaddr[4]);enc28j60Write(MAADR0, macaddr[5]);//配置PHY为全双工 LEDB为拉电流enc28j60PhyWrite(PHCON1, PHCON1_PDPXMD); // no loopback of transmitted framesenc28j60PhyWrite(PHCON2, PHCON2_HDLDIS);// switch to bank 0 enc28j60SetBank(ECON1);// enable interrutpsenc28j60WriteOp(ENC28J60_BIT_FIELD_SET, EIE, EIE_INTIE|EIE_PKTIE);// enable packet receptionenc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, ECON1_RXEN);
}// read the revision of the chip:
unsigned char enc28j60getrev(void)
{//在EREVID 内也存储了版本信息。 EREVID 是一个只读控//制寄存器,包含一个5 位标识符,用来标识器件特定硅片//的版本号return(enc28j60Read(EREVID));
}void enc28j60PacketSend(unsigned int len, unsigned char* packet)
{// Set the write pointer to start of transmit buffer areaenc28j60Write(EWRPTL, TXSTART_INIT&0xFF);enc28j60Write(EWRPTH, TXSTART_INIT>>8);// Set the TXND pointer to correspond to the packet size givenenc28j60Write(ETXNDL, (TXSTART_INIT+len)&0xFF);enc28j60Write(ETXNDH, (TXSTART_INIT+len)>>8);// write per-packet control byte (0x00 means use macon3 settings)enc28j60WriteOp(ENC28J60_WRITE_BUF_MEM, 0, 0x00);// copy the packet into the transmit bufferenc28j60WriteBuffer(len, packet);// send the contents of the transmit buffer onto the networkenc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, ECON1_TXRTS);// Reset the transmit logic problem. See Rev. B4 Silicon Errata point 12.if( (enc28j60Read(EIR) & EIR_TXERIF) ){enc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON1, ECON1_TXRTS);}
}// Gets a packet from the network receive buffer, if one is available.
// The packet will by headed by an ethernet header.
// maxlen The maximum acceptable length of a retrieved packet.
// packet Pointer where packet data should be stored.
// Returns: Packet length in bytes if a packet was retrieved, zero otherwise.
unsigned int enc28j60PacketReceive(unsigned int maxlen, unsigned char* packet)
{unsigned int rxstat;unsigned int len;// check if a packet has been received and buffered//if( !(enc28j60Read(EIR) & EIR_PKTIF) ){// The above does not work. See Rev. B4 Silicon Errata point 6.if( enc28j60Read(EPKTCNT) ==0 ) //收到的以太网数据包长度{return(0);}// Set the read pointer to the start of the received packet 缓冲器读指针enc28j60Write(ERDPTL, (NextPacketPtr));enc28j60Write(ERDPTH, (NextPacketPtr)>>8);// read the next packet pointerNextPacketPtr = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);NextPacketPtr |= enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0)<<8;// read the packet length (see datasheet page 43)len = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);len |= enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0)<<8;len-=4; //remove the CRC count// read the receive status (see datasheet page 43)rxstat = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);rxstat |= enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0)<<8;// limit retrieve lengthif (len>maxlen-1){len=maxlen-1;}// check CRC and symbol errors (see datasheet page 44, table 7-3):// The ERXFCON.CRCEN is set by default. Normally we should not// need to check this.if ((rxstat & 0x80)==0){// invalidlen=0;}else{// copy the packet from the receive bufferenc28j60ReadBuffer(len, packet);}// Move the RX read pointer to the start of the next received packet// This frees the memory we just read outenc28j60Write(ERXRDPTL, (NextPacketPtr));enc28j60Write(ERXRDPTH, (NextPacketPtr)>>8);// decrement the packet counter indicate we are done with this packetenc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON2, ECON2_PKTDEC);return(len);
}//enc28j60.h
#ifndef __ENC28J60_H__
#define __ENC28J60_H__
#include "stm32f10x.h"#define ADDR_MASK 0x1F
#define BANK_MASK 0x60
#define SPRD_MASK 0x80
// All-bank registers
#define EIE 0x1B
#define EIR 0x1C
#define ESTAT 0x1D
#define ECON2 0x1E
#define ECON1 0x1F
// Bank 0 registers
#define ERDPTL (0x00|0x00)
#define ERDPTH (0x01|0x00)
#define EWRPTL (0x02|0x00)
#define EWRPTH (0x03|0x00)
#define ETXSTL (0x04|0x00)
#define ETXSTH (0x05|0x00)
#define ETXNDL (0x06|0x00)
#define ETXNDH (0x07|0x00)
#define ERXSTL (0x08|0x00)
#define ERXSTH (0x09|0x00)
#define ERXNDL (0x0A|0x00)
#define ERXNDH (0x0B|0x00)
//ERXWRPTH:ERXWRPTL 寄存器定义硬件向FIFO 中
//的哪个位置写入其接收到的字节。 指针是只读的,在成
//功接收到一个数据包后,硬件会自动更新指针。 指针可
//用于判断FIFO 内剩余空间的大小。
#define ERXRDPTL (0x0C|0x00)
#define ERXRDPTH (0x0D|0x00)
#define ERXWRPTL (0x0E|0x00)
#define ERXWRPTH (0x0F|0x00)
#define EDMASTL (0x10|0x00)
#define EDMASTH (0x11|0x00)
#define EDMANDL (0x12|0x00)
#define EDMANDH (0x13|0x00)
#define EDMADSTL (0x14|0x00)
#define EDMADSTH (0x15|0x00)
#define EDMACSL (0x16|0x00)
#define EDMACSH (0x17|0x00)
// Bank 1 registers
#define EHT0 (0x00|0x20)
#define EHT1 (0x01|0x20)
#define EHT2 (0x02|0x20)
#define EHT3 (0x03|0x20)
#define EHT4 (0x04|0x20)
#define EHT5 (0x05|0x20)
#define EHT6 (0x06|0x20)
#define EHT7 (0x07|0x20)
#define EPMM0 (0x08|0x20)
#define EPMM1 (0x09|0x20)
#define EPMM2 (0x0A|0x20)
#define EPMM3 (0x0B|0x20)
#define EPMM4 (0x0C|0x20)
#define EPMM5 (0x0D|0x20)
#define EPMM6 (0x0E|0x20)
#define EPMM7 (0x0F|0x20)
#define EPMCSL (0x10|0x20)
#define EPMCSH (0x11|0x20)
#define EPMOL (0x14|0x20)
#define EPMOH (0x15|0x20)
#define EWOLIE (0x16|0x20)
#define EWOLIR (0x17|0x20)
#define ERXFCON (0x18|0x20)
#define EPKTCNT (0x19|0x20)
// Bank 2 registers
#define MACON1 (0x00|0x40|0x80)
#define MACON2 (0x01|0x40|0x80)
#define MACON3 (0x02|0x40|0x80)
#define MACON4 (0x03|0x40|0x80)
#define MABBIPG (0x04|0x40|0x80)
#define MAIPGL (0x06|0x40|0x80)
#define MAIPGH (0x07|0x40|0x80)
#define MACLCON1 (0x08|0x40|0x80)
#define MACLCON2 (0x09|0x40|0x80)
#define MAMXFLL (0x0A|0x40|0x80)
#define MAMXFLH (0x0B|0x40|0x80)
#define MAPHSUP (0x0D|0x40|0x80)
#define MICON (0x11|0x40|0x80)
#define MICMD (0x12|0x40|0x80)
#define MIREGADR (0x14|0x40|0x80)
#define MIWRL (0x16|0x40|0x80)
#define MIWRH (0x17|0x40|0x80)
#define MIRDL (0x18|0x40|0x80)
#define MIRDH (0x19|0x40|0x80)
// Bank 3 registers
#define MAADR1 (0x00|0x60|0x80)
#define MAADR0 (0x01|0x60|0x80)
#define MAADR3 (0x02|0x60|0x80)
#define MAADR2 (0x03|0x60|0x80)
#define MAADR5 (0x04|0x60|0x80)
#define MAADR4 (0x05|0x60|0x80)
#define EBSTSD (0x06|0x60)
#define EBSTCON (0x07|0x60)
#define EBSTCSL (0x08|0x60)
#define EBSTCSH (0x09|0x60)
#define MISTAT (0x0A|0x60|0x80)
#define EREVID (0x12|0x60)
#define ECOCON (0x15|0x60)
#define EFLOCON (0x17|0x60)
#define EPAUSL (0x18|0x60)
#define EPAUSH (0x19|0x60)
// PHY registers
#define PHCON1 0x00
#define PHSTAT1 0x01
#define PHHID1 0x02
#define PHHID2 0x03
#define PHCON2 0x10
#define PHSTAT2 0x11
#define PHIE 0x12
#define PHIR 0x13
#define PHLCON 0x14// ENC28J60 ERXFCON Register Bit Definitions
#define ERXFCON_UCEN 0x80
#define ERXFCON_ANDOR 0x40
#define ERXFCON_CRCEN 0x20
#define ERXFCON_PMEN 0x10
#define ERXFCON_MPEN 0x08
#define ERXFCON_HTEN 0x04
#define ERXFCON_MCEN 0x02
#define ERXFCON_BCEN 0x01
// ENC28J60 EIE Register Bit Definitions
#define EIE_INTIE 0x80
#define EIE_PKTIE 0x40
#define EIE_DMAIE 0x20
#define EIE_LINKIE 0x10
#define EIE_TXIE 0x08
#define EIE_WOLIE 0x04
#define EIE_TXERIE 0x02
#define EIE_RXERIE 0x01
// ENC28J60 EIR Register Bit Definitions
#define EIR_PKTIF 0x40
#define EIR_DMAIF 0x20
#define EIR_LINKIF 0x10
#define EIR_TXIF 0x08
#define EIR_WOLIF 0x04
#define EIR_TXERIF 0x02
#define EIR_RXERIF 0x01
// ENC28J60 ESTAT Register Bit Definitions
#define ESTAT_INT 0x80
#define ESTAT_LATECOL 0x10
#define ESTAT_RXBUSY 0x04
#define ESTAT_TXABRT 0x02
#define ESTAT_CLKRDY 0x01
// ENC28J60 ECON2 Register Bit Definitions
#define ECON2_AUTOINC 0x80
#define ECON2_PKTDEC 0x40
#define ECON2_PWRSV 0x20
#define ECON2_VRPS 0x08
// ENC28J60 ECON1 Register Bit Definitions
#define ECON1_TXRST 0x80
#define ECON1_RXRST 0x40
#define ECON1_DMAST 0x20
#define ECON1_CSUMEN 0x10
#define ECON1_TXRTS 0x08
#define ECON1_RXEN 0x04
#define ECON1_BSEL1 0x02
#define ECON1_BSEL0 0x01
// ENC28J60 MACON1 Register Bit Definitions
#define MACON1_LOOPBK 0x10
#define MACON1_TXPAUS 0x08
#define MACON1_RXPAUS 0x04
#define MACON1_PASSALL 0x02
#define MACON1_MARXEN 0x01
// ENC28J60 MACON2 Register Bit Definitions
#define MACON2_MARST 0x80
#define MACON2_RNDRST 0x40
#define MACON2_MARXRST 0x08
#define MACON2_RFUNRST 0x04
#define MACON2_MATXRST 0x02
#define MACON2_TFUNRST 0x01
// ENC28J60 MACON3 Register Bit Definitions
#define MACON3_PADCFG2 0x80
#define MACON3_PADCFG1 0x40
#define MACON3_PADCFG0 0x20
#define MACON3_TXCRCEN 0x10
#define MACON3_PHDRLEN 0x08
#define MACON3_HFRMLEN 0x04
#define MACON3_FRMLNEN 0x02
#define MACON3_FULDPX 0x01
// ENC28J60 MICMD Register Bit Definitions
#define MICMD_MIISCAN 0x02
#define MICMD_MIIRD 0x01
// ENC28J60 MISTAT Register Bit Definitions
#define MISTAT_NVALID 0x04
#define MISTAT_SCAN 0x02
#define MISTAT_BUSY 0x01
// ENC28J60 PHY PHCON1 Register Bit Definitions
#define PHCON1_PRST 0x8000
#define PHCON1_PLOOPBK 0x4000
#define PHCON1_PPWRSV 0x0800
#define PHCON1_PDPXMD 0x0100
// ENC28J60 PHY PHSTAT1 Register Bit Definitions
#define PHSTAT1_PFDPX 0x1000
#define PHSTAT1_PHDPX 0x0800
#define PHSTAT1_LLSTAT 0x0004
#define PHSTAT1_JBSTAT 0x0002
// ENC28J60 PHY PHCON2 Register Bit Definitions
#define PHCON2_FRCLINK 0x4000
#define PHCON2_TXDIS 0x2000
#define PHCON2_JABBER 0x0400
#define PHCON2_HDLDIS 0x0100// ENC28J60 Packet Control Byte Bit Definitions
#define PKTCTRL_PHUGEEN 0x08
#define PKTCTRL_PPADEN 0x04
#define PKTCTRL_PCRCEN 0x02
#define PKTCTRL_POVERRIDE 0x01// SPI operation codes
#define ENC28J60_READ_CTRL_REG 0x00
#define ENC28J60_READ_BUF_MEM 0x3A
#define ENC28J60_WRITE_CTRL_REG 0x40
#define ENC28J60_WRITE_BUF_MEM 0x7A
#define ENC28J60_BIT_FIELD_SET 0x80
#define ENC28J60_BIT_FIELD_CLR 0xA0
#define ENC28J60_SOFT_RESET 0xFF// The RXSTART_INIT should be zero. See Rev. B4 Silicon Errata
// buffer boundaries applied to internal 8K ram
// the entire available packet buffer space is allocated
//
// start with recbuf at 0/
#define RXSTART_INIT 0x0
// receive buffer end
#define RXSTOP_INIT (0x1FFF-0x0600-1)
// start TX buffer at 0x1FFF-0x0600, pace for one full ethernet frame (~1500 bytes)
#define TXSTART_INIT (0x1FFF-0x0600)
// stp TX buffer at end of mem
#define TXSTOP_INIT 0x1FFF
//
// max frame length which the conroller will accept:
#define MAX_FRAMELEN 1500 // (note: maximum ethernet frame length would be 1518)
//#define MAX_FRAMELEN 600#define ENC28J60_CS_PORT GPIOA
#define ENC28J60_CS_PIN GPIO_Pin_4 /* ENC28J60片选线 */
#define ENC28J60_CSL() \GPIO_ResetBits(ENC28J60_CS_PORT, ENC28J60_CS_PIN) /* 拉低片选 */
#define ENC28J60_CSH() \GPIO_SetBits(ENC28J60_CS_PORT, ENC28J60_CS_PIN) /* 拉高片选 */void Enc28j60_Init(void);
unsigned char enc28j60ReadOp(unsigned char op, unsigned char address);
void enc28j60WriteOp(unsigned char op, unsigned char address, unsigned char data);
void enc28j60ReadBuffer(unsigned int len, unsigned char* data);
void enc28j60WriteBuffer(unsigned int len, unsigned char* data);
void enc28j60SetBank(unsigned char address);
unsigned char enc28j60Read(unsigned char address);
void enc28j60Write(unsigned char address, unsigned char data);
void enc28j60PhyWrite(unsigned char address, unsigned int data);
void enc28j60clkout(unsigned char clk);
void enc28j60Init(unsigned char* macaddr);
unsigned char enc28j60getrev(void);
void enc28j60PacketSend(unsigned int len, unsigned char* packet);
unsigned int enc28j60PacketReceive(unsigned int maxlen, unsigned char* packet);
#endif
更加详细的说明请参考原博客。
4.新建分组
打开空STM32项目、新建组lwip-arch、lwip-netif、lwip-core、lwip-core-ipv4。
lwip-arch添加cc.h、lwipopts.h、perf.h、网卡驱动文件
lwip-netif添加ethernetif.c、etharp.c、slipif.c
lwip-core添加core全部文件,lwip-core-ipv4添加core/ipv4全部文件

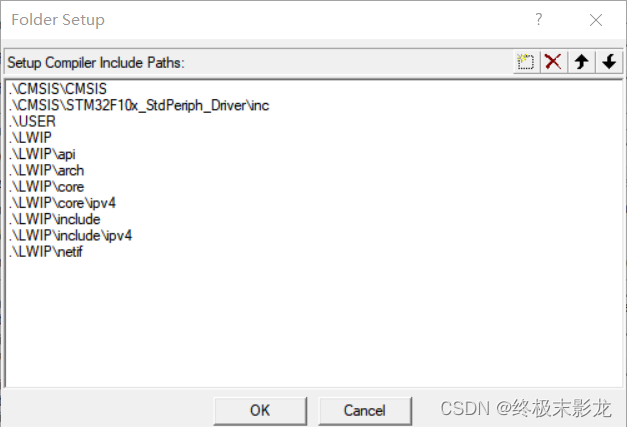
5.项目头文件路径
包含LWIP以及LWIP一些子文件夹路径。看图:
6.LWIIP头文件编写
接下来编写前面提到的三个头文件cc.h、lwipopts.h、perf.h
首先是perf.h,这个文件很简单
//perf.h
#ifndef __PERF_H__
#define __PERF_H__#define PERF_START
#define PERF_STOP(x)
#endif
下面是cc.h,该文件提供了变量类型声明与调试宏定义
//cc.h
#ifndef __CC_H__
#define __CC_H__
#include "stdio.h"typedef unsigned char u8_t; /* Unsigned 8 bit quantity */
typedef signed char s8_t; /* Signed 8 bit quantity */
typedef unsigned short u16_t; /* Unsigned 16 bit quantity */
typedef signed short s16_t; /* Signed 16 bit quantity */
typedef unsigned int u32_t; /* Unsigned 32 bit quantity */
typedef signed int s32_t; /* Signed 32 bit quantity */
typedef unsigned int mem_ptr_t; /* Unsigned 32 bit quantity */
typedef unsigned int sys_prot_t;/* define compiler specific symbols */
#define PACK_STRUCT_FIELD(x) x
#define PACK_STRUCT_STRUCT
#define PACK_STRUCT_BEGIN __packed
#define PACK_STRUCT_END/*--------------macros--------------------------------------------------------*/
#define LWIP_DEBUG
#define LWIP_PLATFORM_DIAG(x) {printf(x);}
#define LWIP_PLATFORM_ASSERT(x) {printf(x);while(1);}
#define LWIP_ERROR(message,expression,handler) \do{\if (!(expression)) {printf(message);handler;}\}while(0)/*---define (sn)printf formatters for these lwip types, for lwip DEBUG/STATS--*/
#define U16_F "u"
#define S16_F "d"
#define X16_F "x"
#define U32_F "u"
#define S32_F "d"
#define X32_F "x"#define LWIP_PROVIDE_ERRNO
#define BYTE_ORDER LITTLE_ENDIAN
extern u32_t sys_now(void);;
#endif /* __CC_H__ */
最后是lwipopts.h,用于重定义opt.h中默认的宏。
#ifndef __LWIPOPTS_H__
#define __LWIPOPTS_H__
//不使用RTOS
#define NO_SYS 1//不适用RTOS时,不使用这些API
#define LWIP_SOCKET 0
#define LWIP_NETCONN 0//LWIP的内存大小
#define MEM_ALIGNMENT 4
#define MEM_SIZE 10*1024//TCP发送缓存与最长报文段长度
#define TCP_SND_BUF 4000
#define TCP_MSS 1000//调试功能
#define ETHARP_DEBUG LWIP_DBG_ON
#define ICMP_DEBUG LWIP_DBG_ON#endif /* __LWIPOPTS_H__ */7.ethernetif.c
这个文件用于向LWIP封装网卡驱动。在前面的网卡驱动那一节已经实现了网卡的驱动,其中有三个函数:
void enc28j60Init(unsigned char* macaddr);//网卡初始配置void enc28j60PacketSend(unsigned int len, unsigned char* packet);//发送unsigned int enc28j60PacketReceive(unsigned int maxlen, unsigned char* packet);//接收
本文件就是封装这三个函数,向LWIP实现以下几个函数:
void low_level_init(struct netif *netif)
err_t low_level_output(struct netif *netif, struct pbuf *p)
struct pbuf *low_level_input(struct netif *netif)
void ethernetif_input(struct netif *netif)
err_t ethernetif_init(struct netif *netif)
打开LWIP的ethernetif.c文件,发现官方已经为我们用0宏定义写好了这五个函数的框架。其中ethernetif_init可以直接使用不修改,其他的要自己实现。
其他函数的实现我参考了《嵌入式网络那些事——STM32物联实战-朱升林-2015年版》这本书。
void low_level_init(struct netif *netif)
static unsigned char MyMacID[6] = {'M','y','L','W','I','P'};
static void low_level_init(struct netif *netif)
{struct ethernetif *ethernetif = netif->state;netif->hwaddr_len = ETHARP_HWADDR_LEN;//自定义网卡MAC地址for(int i = 0 ; i < ETHARP_HWADDR_LEN ; i++)netif->hwaddr[i] = MyMacID[i];netif->mtu = 1500;netif->flags = NETIF_FLAG_BROADCAST | NETIF_FLAG_ETHARP | NETIF_FLAG_LINK_UP; //在原来的框架上,调用网卡寄存器初始化函数enc28j60Init(MyMacID);
}err_t low_level_output(struct netif *netif, struct pbuf *p)`
static unsigned char MySendbuf[1500];
static err_t low_level_output(struct netif *netif, struct pbuf *p)
{struct pbuf *q = NULL;unsigned int templen = 0;for (q = p ; q != NULL ; q = q->next){memcpy(&MySendbuf[templen],q->payload,q->len);templen += q->len;if (templen > 1500 || templen > p->tot_len) return ERR_BUF;}if (templen == p->tot_len){enc28j60PacketSend(templen,MySendbuf);return ERR_OK;}return ERR_BUF;
}
struct pbuf *low_level_input(struct netif *netif)
static unsigned char MyRecvbuf[1500];
static struct pbuf *low_level_input(struct netif *netif)
{struct pbuf *p=NULL, *q=NULL;u16_t len = 0,i = 0;len = enc28j60PacketReceive(1500,MyRecvbuf);if (!len) return NULL;p = pbuf_alloc(PBUF_RAW,len,PBUF_RAM);if (!p) return NULL;q = p;while(q != NULL){memcpy(q->payload,&MyRecvbuf[i],q->len);i += q->len;q = q->next;if(i>=len) break;}return p;
}
void ethernetif_input(struct netif *netif)
void ethernetif_input(struct netif *netif)
{struct ethernetif *ethernetif;struct eth_hdr *ethhdr;struct pbuf *p;ethernetif = netif->state;p = low_level_input(netif);if (p == NULL) return;ethhdr = p->payload;switch (htons(ethhdr->type)) {case ETHTYPE_IP:case ETHTYPE_ARP:
#if PPPOE_SUPPORT/* PPPoE packet? */case ETHTYPE_PPPOEDISC:case ETHTYPE_PPPOE:
#endif /* PPPOE_SUPPORT */if (netif->input(p, netif)!=ERR_OK){ LWIP_DEBUGF(NETIF_DEBUG, ("ethernetif_input: IP input error\n"));pbuf_free(p);p = NULL;}break;default:pbuf_free(p);p = NULL;break;}
}
8.sys_now
LWIP需要定时功能(ARP、TCP都有定时需求),而LWIP需要用户实现一个unsigned int sys_now(void)的函数来返回当前运行时间。
有RTOS基础的都知道RTOS都会有一个计时变量,在各自的RTOS的SysTick中断函数中自增。
现在我们没有用RTOS,但是也要提供这样的函数。因此我们在中断文件stm32f10x_it.c中,实现这些功能:
#include "stm32f10x_it.h"
unsigned int lwip_localtime;
void SysTick_Handler(void)
{lwip_localtime++;
}unsigned int sys_now(void){return lwip_localtime;
}void EXTI1_IRQHandler(){if(EXTI_GetITStatus(EXTI_Line1) != RESET) {EXTI_ClearITPendingBit(EXTI_Line1);}
}
这里为什么会有一个外部中断函数?
网卡驱动函数里面初始化了网卡的INT引脚,因此必须根据你的引脚连接,实现对应的外部中断函数。
否则测试的时候,一旦接收到数据,触发中断,系统会因为没有重定义外部中断函数而死循环(重要!笔者被弄过好几次)。
9.初始化函数
LWIP移植时要实现的函数与要修改的地方就这些。在开始使用LWIP前,就像其他很多东西一样,要进行LWIP初始化。
写一个函数完成:
//main.c
struct netif enc28j60_netif;
err_t ethernetif_init(struct netif* netif);
void ethernetif_input(struct netif *netif);void LWIP_Init(void){NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//网卡的GPIO、中断等初始化函数,你也可以放在enc28j60Init最前面Enc28j60_Init();//简单延时uint32_t t = 0x001fffff;while(t--);//开启SystickSysTick_Config(SystemCoreClock/1000);//LWIP初始化,设置网关、IP(这里是192.168.1.114)、掩码struct ip_addr ipaddr,netmask,gw;lwip_init();IP4_ADDR(&gw,192,168,1,1);IP4_ADDR(&ipaddr,192,168,1,114);IP4_ADDR(&netmask,255,255,255,0);netif_add(&enc28j60_netif,&ipaddr,&netmask,&gw,NULL,ethernetif_init,ethernet_input);netif_set_default(&enc28j60_netif);netif_set_up(&enc28j60_netif);
}
10.主函数
本文仅实现PING功能,不实现应用层功能。因此这样写:
int main(void){//串口初始化,看这文章的应该没有不会用printf串口打印的吧(Usart_1_Config();printf("\r\n 这是一个无OS移植LWIP实验 \r\n现在可以ping试试");//调用上面的初始化函数LWIP_Init();//循环调用ethernetif_input与sys_check_timeoutswhile(1){ethernetif_input(&enc28j60_netif);sys_check_timeouts();}
}
至此,代码部分全部编写完成。
注意
1.正如前文所述,网卡驱动初始化了中断。一旦收到数据,对应的引脚(看你连接)触发中断。如果不重写中断函数,触发中断时会进入死循环。
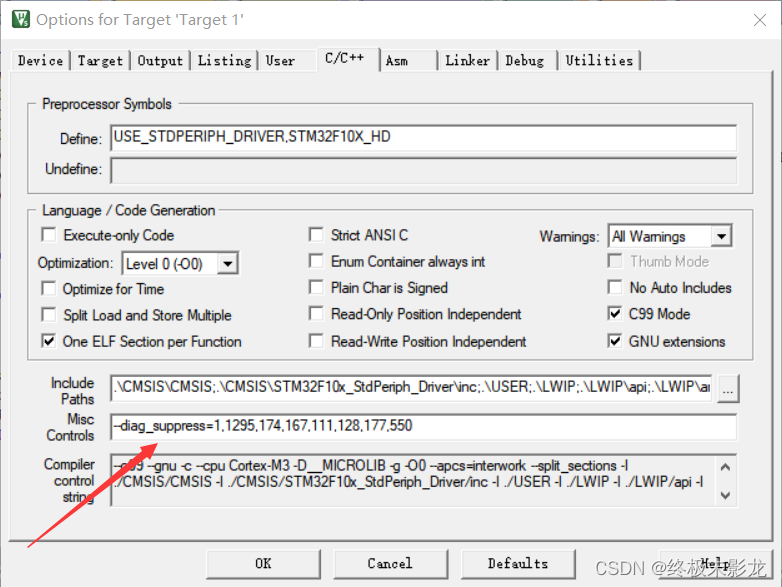
2、直接编译时,KEIL5会报500多个警告(调试相关),因此这样做:
点击魔术棒 -> C/C++ -> MiscControls,在里面输入下面这一段文字:
--diag_suppress=1,1295,174,167,111,128,177,550
消除很多没用的警告。
3. ENC28J60模块的VCC引脚要接5V,3.3V经过测试无法正常运行。
测试
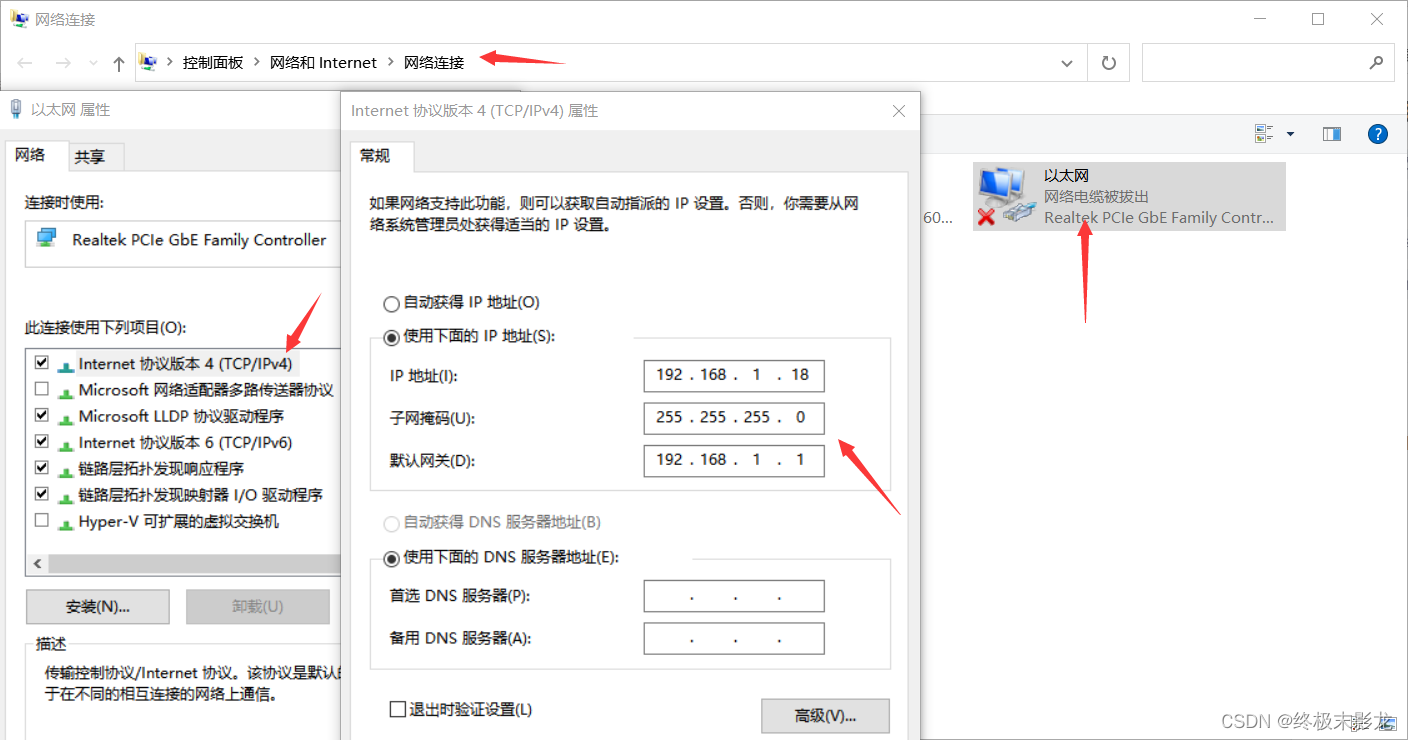
已知前文中,网卡初始化成这样:
网关 192.168.1.1
IP地址 192.168.1.114
掩码 255.255.255.0
控制面板 -> 网络和Internet -> 网络连接 -> 右键以太网 -> 属性
这样设置:
以太网IP为192.168.1.x
掩码为255.255.255.0
网关192.168.1.1
(总之和单片机在一个网段)
结果
ping 192.168.1.114 正常情况可以PING通

源码
点击我获得源码