绘制根轨迹目的就是改变系统的闭环极点,使得系统由不稳定变为稳定或者使得稳定的系统变得更加稳定。
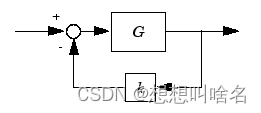
在使用PID控制器的时候,首先要确定的参数是Kp,画成框图的形式如下:

也就是想要知道Kp对系统性能有哪些影响,此时就要用到根轨迹来分析,Kp的增加对系统的性能有什么影响。
知道系统的传递函数G(s)后,想要绘制系统的根轨迹,就要用到matlab中的rlocus函数。通过matlab中的帮助文档,可以看到
这个函数的K是加到反馈上的,那么我们到底能不能用这个函数来分析PID中Kp变化对根带来的影响呢,可以将两个的闭环传递函数都写出来
第一个的闭环传递函数是:
![]()
第二个传递函数则是:
![]()
可以看出两者的分母是相同的,都是1+KG(s),而根轨迹的另一种解释是,使分母为0,即1+KG(s)=0时,K从0到无穷,1+KG(s)=0根的变化。因此两者的根轨迹实际是相同的。因此K在误差环节还是反馈环节,两者系统的根轨迹一样。