1. 哥白尼计划
说起欧空局的哨兵1号,就不得不先说一下欧空局的“哥白尼计划”。
欧空局的哥白尼计划(Copernicus Programme)是欧空局与欧盟合作的一项极其重要的地球观测计划。该计划旨在提供免费开放的、可持续的地球观测数据,以支持土地管理、海洋环境、大气、应急、安全和气候变化多个领域的应用。
哥白尼计划最早的筹备工作始于2001年,但正式启动日期是在2014年。这个计划以尼古拉斯·哥白尼(Nicolaus Copernicus)的名字命名,以纪念这位波兰天文学家。自启动以来,哥白尼计划已经不断发展和扩展,为全球提供了重要的地球观测数据。
- 介绍哥白尼计划的视频:欧空局“哥白尼计划”介绍
- 哥白尼计划官网:哥白尼计划欧空局主页
- 中国气象局对其的报道:哥白尼计划——欧洲对地观测的战略雄心
2. 哨兵系列卫星
哥白尼计划包括一系列卫星,被称为 “ 哥白尼哨兵(Copernicus Sentinel)”。这些卫星搭载不同的传感器,包括SAR、光学和红外传感器,用于监测地球表面、大气和海洋。这些哨兵卫星提供了较高分辨率、多谱段的地球观测数据。

本文信息大部分来自欧空局官网:任务 - 哨兵在线 - 哨兵在线 (esa.int)
接下来我们针对哨兵1号展开详细介绍。
3. 哨兵1号SAR卫星
SENTINEL-1的使命:为需要长时间序列的业务和应用提供更高的重访频率、覆盖范围、及时性和可靠性。并提供业务化的干涉成像能力。
Sentinel-1是由两颗相同的SAR卫星组成的星座。Sentinel-1A于2014年4月3日发射升空,Sentinel-1B于2016年4月25日发射升空。这两颗卫星在同一轨道平面上相距180度,可以实现最佳的全球覆盖和数据传输,可以在六天内对全球进行一次成像。
不过Sentinel-1B星在2021年底因为电源故障无法使用了,目前欧空局准备再发一颗Sentinel-1C星进行替代,目前Sentinel-1C应当是研制完成了,之前预计23年上半年发射,现在推迟到什么时候还不知道。
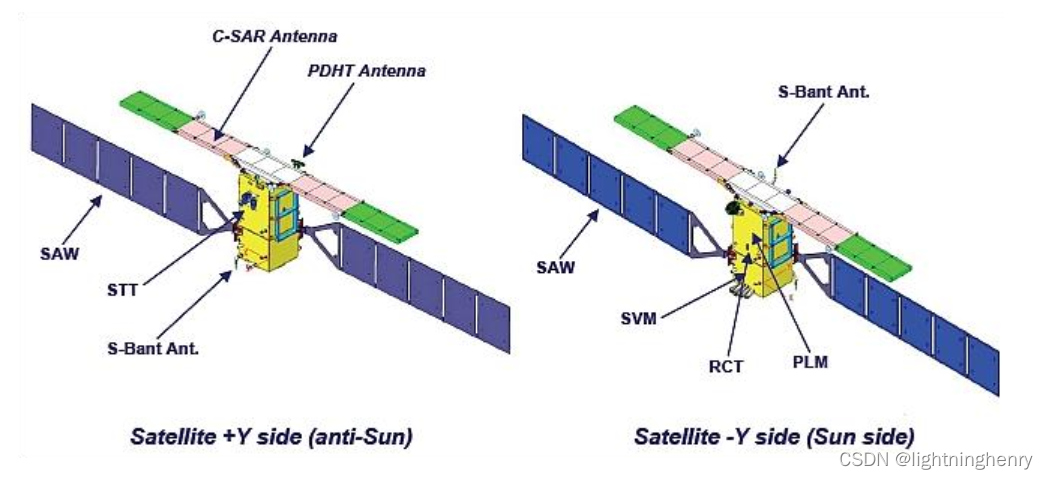
下面这张图从几个角度对哨兵1号进行了简介:

Sentinel-1主要应用于:
- 北极海冰面积监测
- 常规海冰测绘
- 监测海洋环境,包括溢油监测
- 用于海上安全的船舶检测
- 监测地表板块运动风险
- 森林、水和土壤管理制图
- 绘制地图以支持人道主义援助和危机局势。
3.1 视频介绍
- 哨兵1号SAR卫星空客宣传片_哔哩哔哩_bilibili
- 手绘漫画科普:哨兵1号SAR卫星微波视觉_哔哩哔哩_bilibili
想知道卫星造好以后到在轨服务中间经历了什么吗?请看以下系列视频:
- 哨兵1号SAR卫星相控阵天线暗室测试_哔哩哔哩_bilibili
- 哨兵1号SAR卫星太阳能帆板测试_哔哩哔哩_bilibili
- 哨兵1号SAR卫星转厂检查装入火箭_哔哩哔哩_bilibili
- 哨兵1号SAR卫星搭载俄罗斯联盟号火箭发射_哔哩哔哩_bilibili
- 哨兵1号SAR卫星入轨流程与在轨工作演示_哔哩哔哩_bilibili
- 哨兵1号SAR卫星使用激光通信实现高速数传_哔哩哔哩_bilibili
最后是3个SAR数据的应用案例:
- 哨兵1号SAR卫星瞰新加坡,马六甲海峡船好多_哔哩哔哩_bilibili
- 哨兵1号SAR卫星瞰鄱阳湖_哔哩哔哩_bilibili
- 哨兵1号SAR卫星瞰贝加尔湖,曾经中国的领土,中国的北海,苏武牧羊的地方,朱元璋派蓝玉在这里大败北元!_哔哩哔哩_bilibili
上面的视频基本按照卫星制造-总装-测试-转厂-搭载火箭-发射-星箭分离-入轨调整-在轨测控数传-数据服务的流程进行了排序,因为素材有限,以上视频有的是Sentinel-1A,有的是Sentinel-1B或1C,1A、1B、1C这三颗卫星基本一样,不影响流程。
3.2 指标介绍
下面站在卫星研制和数据产品的角度对哨兵1号卫星进行全面介绍!
| 类别 | 说明 | 备注 |
| 卫星型号 | Sentinel-1 | |
| 卫星所有权 | 欧空局 | |
| 卫星制造商 | Thales Alenia Space Italy 为总体单位, 空客防务与航天(以前叫Astrium )承制SAR载荷 | |
| 卫星总设计师、SAR载荷总设计师 | 不详 | |
| 卫星总装厂 | Thales Alenia Space’s plant in Cannes, France. | |
| 搭载火箭 | 俄罗斯联盟号火箭 | |
| 发射基地 | 法国殖民地圭亚那 | |
| 接收站 | X波段: 挪威斯瓦尔巴特群岛;意大利马泰拉;西班牙 Maspalomas;加拿大 Inuvik; 激光中转: 德国魏尔海姆(Weilheim)地面站、英国哈罗威尔(Harwell)地面站等 | Sentinel-1上的激光通信终端(LCT)通过欧洲数据中继卫星(EDRS)将数据传输到地面站。 |
| 卫星轨道 | 太阳同步轨道,轨道高度693km,轨道倾角98.18° | |
| 姿轨控精度 | 姿态:测量精度0.004°;维持精度0.01°; 轨道:轨道回归精度100 m (RMS) | |
| 升交点地方时 | 18:00 | |
| 重访周期 | 单颗卫星最长12天,175轨 | 详见4.3 |
| 系统形态 | 双基SAR(也可以单基SAR独立工作) | |
| 观测方向 | 右侧视 | |
| 电池容量 | 324Ah | |
| 数传速率 | X波段数传, 最高520 Mbit/s 星间激光通信,最高1.8Gbps | |
| 卫星体积 | 3.9 m × 2.6 m × 2.5 m(长×宽×高)2.8x2.5x4 | 在火箭里不展开时的体积 |
| 卫星重量 | 发射重量2300kg,干重2170kg SAR载荷重945kg,其中相控阵天线重880kg | |
| 卫星功耗 | 最大可供能5900w | |
| 卫星成本 | 制造成本:欧空局给Thales Alenia Space Italy 签了2.7亿欧元合同 发射成本:联盟号火箭约4000美元/公斤 | |
| 卫星寿命 | 设计至少7年 搭了12年的燃料,也就是说最多12年 | 实际上sentinel-1B使用了6年挂掉了,6年寿命对于卫星来说不算短了。 |
| 研制周期 | 约4年 | |
| 雷达体制 | 相控阵脉冲雷达 | |
| 波段 | C波段,5.405GHz | |
| 极化方式 | 单极化(HH 或 VV) 双极化(HH+HV 或 VV+VH) | 大部分时候使用双极化 |
| 天线类型 | 波导缝隙天线 | |
| 天线孔径 | 方位向 x 距离向:12.3 m x 0.821 m | |
| 通道数量 | 不详 | |
| 发射功率 | 峰值功率:- 4.368 kW, - 4.075 kW (IW, dual polarisations) | |
| NESZ | 不详 | |
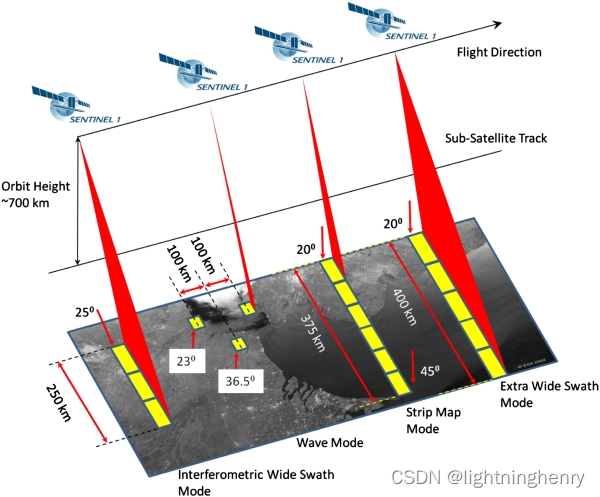
| 成像模式 | SM,条带SAR IW,干涉SAR+TOPSAR,3个子带 EW, TOPSAR,5个子带 WV,比较特殊的成像模式,两种入射角交替间隔成像,适用于大范围海洋监测,后面有详细解释 | SM: Stripmap IW: Interferometric Wide swath EW: Extra Wide swath WV: Wave,仅限单极化 |
| 分辨率@幅宽 | 分辨率最高4.3m; 幅宽最宽400km; 20m@250km(主要模式) | 详见3.3节 |
| 入射角范围 | 20°- 46° | |
| 扫描角范围 | 方位向:-0.9° to +0.9° 距离向:-13.0° to +12.3° | |
| 波束宽度 | 方位向0.23° 距离向3.43° | |
| 姿态导引 | 零多普勒导引,滚转导引 | |
| 脉宽 | 5-100us | |
| 带宽 | 最大100MHz | |
| ADC采样率 | 300MSpS(实采样) | |
| ADC有效位宽 | 10bit | |
| PRF | 1 000 - 3 000 Hz | |
| 发射占空比 | Max 12%, SM 8.5%, IW 9%, EW 5%, WV 0.8% | |
| 单次成像时间 | 小于25分钟 | |
| 模糊度 | 不详 | |
| 辐射分辨率 | 0.8~2.2dB | |
| 辐射精度 | 相对辐射精度0.3dB(1σ) 绝对辐射精度0.8dB(1σ) | |
| 定位精度 | 10米左右 | 几何精校后 |
| 数据大小 | 星上固存容量最大1 410 Gb | |
| 数据压缩方式 | FDBAQ | |
注:以上指标有一些没找到,后续找到了补充上去,也欢迎知道的朋友发在评论里。
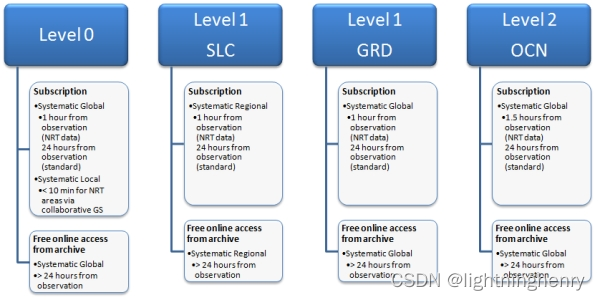
3.3 数据产品介绍

名词解释:
- SLC: Single Look Complex,单复视。复数数据,同时包含有幅度和相位信息
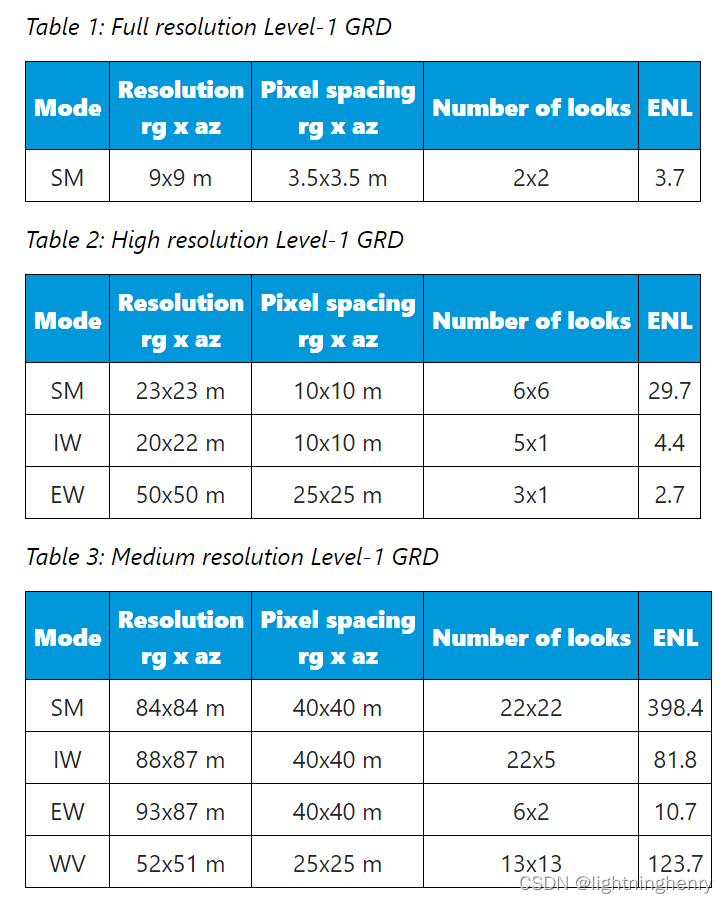
- GRD: Ground Range Detected,地距探测。SLC进行地距投影+多视处理得到GRD图像
- OCN: Ocean,海洋。2级海洋数据。
- OSW: ocean swell spectra
- OWI: ocean wind fields
- RVL: surface radial velocity
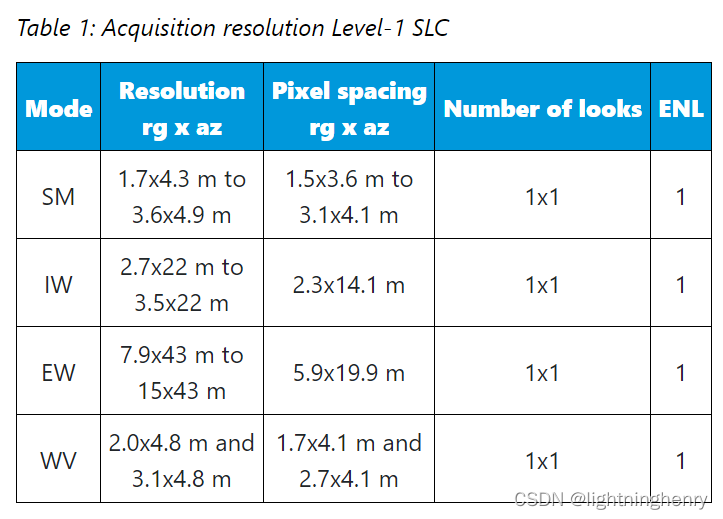
注意区分辨率与像素间距
数据分发时间表:
4. 扩展知识
哨兵-1 SAR的一些名词解释
4.1 PRIMA bus
PRIMA (Piattaforma Italiana Multi Applicativa) bus是由Thales Alenia Space Italy公司研制的一种高适应性的多任务卫星平台,它可以根据不同的载荷和任务需求进行配置,适用于低地球轨道(LEO)和中地球轨道(MEO)的各种卫星任务。
PRIMA bus基于先进的空间技术,采用模块化的架构和集成的控制系统¹。PRIMA bus由三个模块组成,分别是推进模块(PPM),服务模块(SVM)和载荷模块(PLM)。这三个模块在结构上和功能上是分离的,可以进行并行的集成和测试。
- 推进模块(PPM)包含了所有的推进设备,包括燃料箱、喷管、阀门、管路等³。推进模块提供了精确的轨道控制能力,可以维持卫星在一个直径为100米的地球固定轨道管内运行²。
- 服务模块(SVM)包含了所有其他必要的设备,以保证卫星的正常运行,包括姿态和轨道控制系统、数据处理系统、电源系统、热控制系统、卫星自主性和故障检测识别和恢复系统、以及与地面通信系统³。服务模块采用三轴稳定的架构,使用太阳传感器、恒星传感器、陀螺仪和磁场传感器来测量卫星的姿态,使用四个反作用轮和三个磁力矩器作为执行器来调整卫星的姿态。服务模块提供了高精度的姿态测量信息(小于0.004°)、高精度的姿态控制(约0.01°)和实时的轨道确定能力(小于10米)。服务模块还使用Mil-1553总线作为计算机、航空电子和卫星通信的主干线,并使用ERC 32处理器架构。
- 载荷模块(PLM)包含了主要的载荷和其他次要的载荷。主要的载荷是一种合成孔径雷达(C-SAR),它可以在任何天气和光照条件下观测地球表面。
PRIMA bus已经成功地应用于多个卫星项目,包括RADARSAT-2,COSMO-SKYMED,Sentinel-1和Sentinel-3等。PRIMA bus具有高可靠性、高灵活性、高性能和低成本等优点,是一种先进而实用的卫星平台技术。
4.2 WV成像模式
Wave (WV) - Data is acquired in small stripmap scenes called "vignettes", situated at regular intervals of 100 km along track. The vignettes are acquired by alternating, acquiring one vignette at a near range incidence angle while the next vignette is acquired at a far range incidence angle. WV is SENTINEL-1's operational mode over open ocean.
WV模式是Sentinel-1在开阔海洋上使用的一种特殊模式,它与全球海浪模型相结合,可以帮助确定开阔海洋上波浪的方向、波长和高度。
在这种模式下,卫星不是连续地拍摄一条长条形的图像,而是每隔100公里拍摄一个20公里乘20公里的小方形图像,这些小方形图像被称为“vignettes”。每个vignette都是用单极化(HH或VV)的雷达波进行成像的。
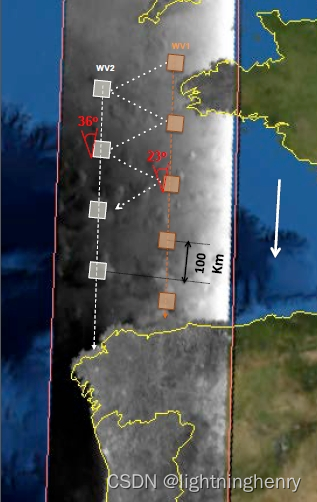
为了提高成像的质量和多样性,Sentinel-1在拍摄vignettes时会交替改变天线的入射角。不同的入射角会导致不同的反射和散射效果,从而影响图像的对比度和细节。在拍摄一个vignette时,卫星会选择其中一个入射角范围,并保持不变。在拍摄下一个vignette时,卫星会切换到另一个入射角范围,并以此类推。这样,相同位置的vignettes就会有不同的入射角,从而提供更多的信息。
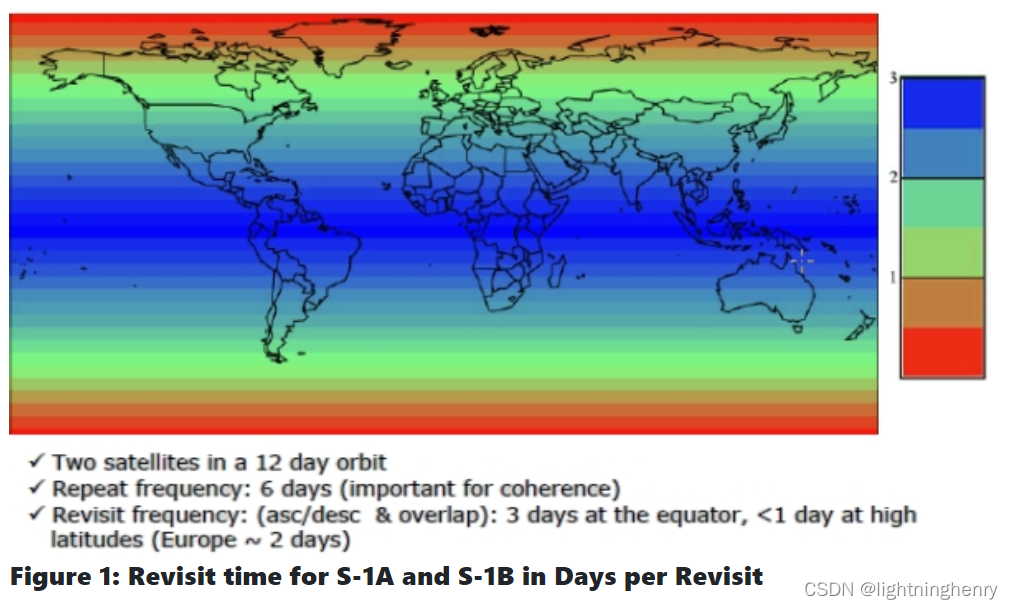
4.3 重访周期
由两颗卫星组成的sentinel-1星座在赤道上提供了6天的精确重复周期。由于轨道轨道间距随纬度而变化,高纬度地区的重访率明显高于赤道。
接下来的文章我们将分析L0级回波数据,然后对回波数据进行预处理和SAR成像处理,并且不使用ENVI、SNAP等遥感软件,全部使用MATLAB实现,代码全部开源。
敬请期待!

![[面试] 15道最典型的k8s面试题](https://img-blog.csdnimg.cn/ce77c438e66b415e9d325b0d66e8fbd1.jpeg#pic_center)