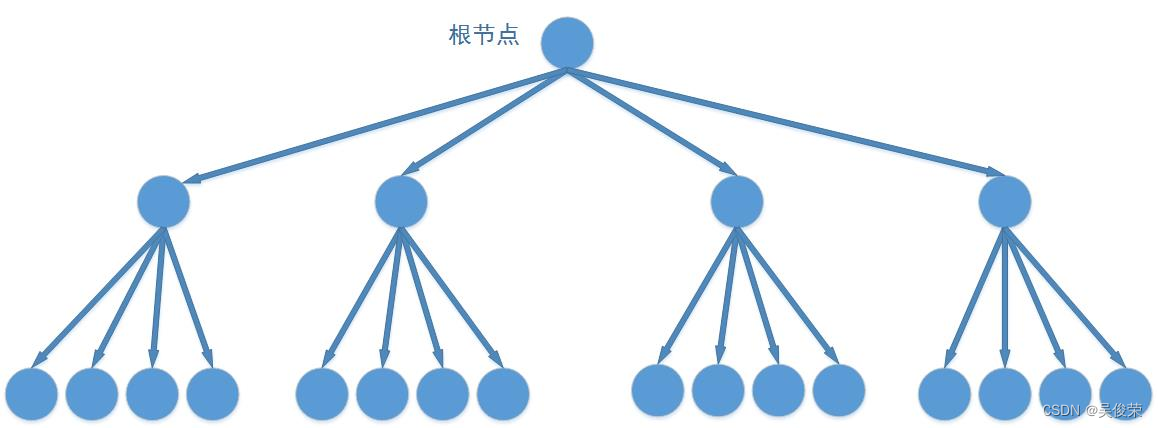
四叉树(Quadtree)是一种用于表示和管理二维空间的树状数据结构。它将二维空间递归地分割成四个象限,每个象限可以继续分割,以实现对空间的更精细的划分。四叉树通常用于解决空间搜索和查询问题,例如碰撞检测、图像压缩、地理信息系统等领域。
特别适合大规模的广阔室外场景管理。一般来说如果游戏场景是基于地形的(甚至没有高度)(如城市、平原、2D场景),那么适合用四叉树来管理。而如果游戏场景在高度轴上也有大量物体需要管理(如太空、高山),那么适合用八叉树来管理。
#include <iostream>// 定义二维点的结构体
struct Point {float x;float y;Point(float _x, float _y) : x(_x), y(_y) {}
};// 定义四叉树节点
struct QuadTreeNode {Point point;QuadTreeNode* topLeft;QuadTreeNode* topRight;QuadTreeNode* bottomLeft;QuadTreeNode* bottomRight;QuadTreeNode(Point _point) : point(_point), topLeft(nullptr), topRight(nullptr), bottomLeft(nullptr), bottomRight(nullptr) {}
};class QuadTree {
private:QuadTreeNode* root;int maxDepth; // 最大深度// 在指定深度下递归插入节点QuadTreeNode* insert(QuadTreeNode* node, Point point, int depth) {if (node == nullptr) {return new QuadTreeNode(point);}// 根据点的位置选择象限if (point.x < node->point.x && point.y < node->point.y) {node->bottomLeft = insert(node->bottomLeft, point, depth + 1);} else if (point.x >= node->point.x && point.y < node->point.y) {node->bottomRight = insert(node->bottomRight, point, depth + 1);} else if (point.x < node->point.x && point.y >= node->point.y) {node->topLeft = insert(node->topLeft, point, depth + 1);} else {node->topRight = insert(node->topRight, point, depth + 1);}return node;}// 在指定深度下递归搜索节点bool search(QuadTreeNode* node, Point point, int depth) {if (node == nullptr) {return false;}if (node->point.x == point.x && node->point.y == point.y) {return true;}// 根据点的位置选择象限if (point.x < node->point.x && point.y < node->point.y) {return search(node->bottomLeft, point, depth + 1);} else if (point.x >= node->point.x && point.y < node->point.y) {return search(node->bottomRight, point, depth + 1);} else if (point.x < node->point.x && point.y >= node->point.y) {return search(node->topLeft, point, depth + 1);} else {return search(node->topRight, point, depth + 1);}}public:QuadTree(float minX, float minY, float maxX, float maxY, int depth) : root(nullptr), maxDepth(depth) {}// 插入一个点void insert(Point point) {root = insert(root, point, 0);}// 搜索一个点是否存在bool search(Point point) {return search(root, point, 0);}
};int main() {QuadTree quadtree(0.0f, 0.0f, 100.0f, 100.0f, 4); // 创建四叉树,定义边界和最大深度Point point1(10.0f, 20.0f);Point point2(80.0f, 90.0f);quadtree.insert(point1); // 插入点1quadtree.insert(point2); // 插入点2Point searchPoint(80.0f, 90.0f);bool found = quadtree.search(searchPoint); // 搜索点2if (found) {std::cout << "Point found in the quadtree." << std::endl;} else {std::cout << "Point not found in the quadtree." << std::endl;}return 0;
}