匿名上位机V7波形显示教程-简单能用
- 匿名上位机V7下位机数据格式
- 根据匿名上位机V7的手册说明文档,编写对应的指令
- 在主函数中初始化ANDmessage驱动
- 连接匿名上位机V7
匿名上位机V7下位机数据格式

DATA区域内容:
举例说明DATA区域格式,例如上文,需要发送ABC三个数据,AB为int16 型,C为int32 型,那么ABC三个数据共2+2+4=8字节,那么LEN字节为8,帧ID 为0xF1,DATA区域依次放入ABC三个数据,然后计算SC、AC,完成后将本帧发送至上位机即可。
根据匿名上位机V7的手册说明文档,编写对应的指令
stm32程序使用H库,串口和其他的初始化就不在这里解说各位大佬一定很熟悉了,这里主要生成驱动匿名上位机的代码。
粘贴生成.h头文件
ANDmessage.h
#ifndef _ANDmessage_H
#define _ANDmessage_H
//#include "stm32f205xx.h"
#include <string.h>
#include "main.h"//目标地址宏定义
#define FRAME_HEADER 0XAA //<匿名协议固定帧头
#define GENERAL_OUTPUT_ADDR 0XFF //<广播型输出
#define HOST_ADDR 0XAF //<向上位机输出
#define PRO_ADDR 0X05 //<拓空者PRO飞控
#define SHUCHUAN_ADDR 0X10 //<匿名数传
#define GUANGLIU_ADDR 0X22 //<匿名光流
#define UWB_ADDR 0X30 //<匿名UWB
#define IMU_ADDR 0X60 //<匿名凌霄IMU
#define LINGXIAO_ADDR 0X61 //<匿名凌霄飞控#define HWTYPE 0X01 //<用于存储下位机的类型信息
#define ID_INFO5 0X05 //<预留位
#define ID_INFO6 0X06 //<预留位
#define ID_INFO7 0X07 //<预留位
#define ID_INFO8 0X08 //<预留位
#define ID_INFO9 0X09 //<预留位
#define ID_INFO10 0X0A //<预留位#define ANO_BLACK 0X00 //<字符黑色打印
#define ANO_RED 0X01 //<字符红色打印
#define ANO_GREEN 0X02 //<字符绿色打印//32位数据进行四个字节剥离拆分,从低位到高位
#define BYTE0(temp) (*(char*)(&temp))
#define BYTE1(temp) (*((char*)(&temp)+1))
#define BYTE2(temp) (*((char*)(&temp)+2))
#define BYTE3(temp) (*((char*)(&temp)+3))typedef struct
{uint16_t par_id; //<参数idint32_t par_val; //<参数值
}par_struct;/****通信帧对象结构体****/
typedef struct
{uint8_t head; //<帧头uint8_t target_addr; //<目标地址uint8_t function_id; //<该帧要实现某功能的功能码iduint8_t data_len; //<数据长度uint8_t data[40]; //<数据内容,协议最高只支持40字节数据 uint8_t sum_check; //<和校验uint8_t add_check; //<附加校验par_struct* parameter; //<参数
}ano_frameStruct;/*共同点:形参都含ano_frameStruct*类型指针*/
extern void ano_frame_reset(ano_frameStruct* frame);
extern void ano_check_calculate(ano_frameStruct* frame);
extern uint8_t ano_check(ano_frameStruct* frame);
extern void frame_turn_to_array(ano_frameStruct* frame,uint8_t*str);
//.....extern void ano_send_string(uint8_t color,char* str);
extern void ano_send_message(char* str,int32_t value);
extern void ano_send_flexible_frame(uint8_t id,int32_t x_coordinate,int32_t y_coordinate);
extern void ano_frame_init(void);#endif粘贴生成.c文件
ANDmessage.c
#include "stm32f4xx_hal.h"
#include "main.h"
#include "usart.h"
#include "ANDmessage.h"static par_struct send_parameter; //<发送帧中的参数;
static par_struct rec_parameter; //<接收帧的参数;
static ano_frameStruct send_frame_struct; //<(发送)通信帧结构体
__IO ano_frameStruct rec_frame_struct; //<(接收)通信帧结构体,因不止在本.c文件使用,故不用static修饰/*** @brief 初始化通信帧结构体,使用前必须调用* @param 无输入参数* @retval 无返回**/
void ano_frame_init(void)
{/*参数结构体初始化*/send_frame_struct.parameter=&send_parameter;rec_frame_struct.parameter=&rec_parameter;send_frame_struct.parameter->par_id=0;send_frame_struct.parameter->par_val=0;rec_frame_struct.parameter->par_id=0;rec_frame_struct.parameter->par_val=0;send_frame_struct.head=rec_frame_struct.head=FRAME_HEADER;//帧头固定是0XAAsend_frame_struct.target_addr=rec_frame_struct.target_addr=HOST_ADDR;send_frame_struct.function_id=0XFF;//<协议中没有定义的功能ID,这样初始化目的是为了启动瞬间不做任何动作memset(send_frame_struct.data,0,40);//<缓存默认全部置0memset(rec_frame_struct.data,0,40);
}/*** @brief 复位通信帧结构体,ano_frame_init()必须要运行过一次* @param 通信帧结构体对象* @retval 无返回**/
void ano_frame_reset(ano_frameStruct* frame)
{frame->function_id=0XFF; frame->data_len=0;memset(frame->data,0,40);frame->add_check=0;frame->sum_check=0;
}/*** @brief 通信帧中参数结构体内成员的配置* @param 通信帧结构体对象,参数ID与参数值* @retval **/
void ano_par_struct_config(ano_frameStruct* frame,uint16_t id,int32_t val)
{frame->parameter->par_id=id;frame->parameter->par_val=val;
}/*** @brief 通信帧校验计算* @param 通信帧结构体对象* @retval 无返回值**/
static void ano_check_calculate(ano_frameStruct* frame)
{frame->sum_check=0;frame->add_check=0;//除去和校验,附加校验及数据部分,有4个部分4个字节,长度固定for(uint32_t i=0;i<4;i++){frame->sum_check+= *(uint8_t*)(&frame->head+i);frame->add_check+=frame->sum_check;}//获取数据长度部位,把数据部分全加上for(uint32_t i=0;i<frame->data_len;i++){frame->sum_check+=*((uint8_t*)(frame->data)+i);frame->add_check+=frame->sum_check;} }/*** @brief 通信帧校验检查(接收上位机通信帧时用)* @param 通信帧结构体对象* @retval 1:校验成功 0:校验失败**/
static uint8_t ano_check(ano_frameStruct* frame)
{uint8_t sum_check=0;uint8_t add_check=0;for(uint32_t i=0;i<4;i++){sum_check+= *(uint8_t*)(&frame->head+i);add_check+=sum_check;}for(uint32_t i=0;i<frame->data_len;i++){sum_check+=*((uint8_t*)(frame->data)+i);add_check+=sum_check;}//如果计算与获取的相等,校验成功if((sum_check==frame->sum_check)&&(add_check==frame->add_check))return 1;elsereturn 0;
}/*** @brief 匿名串口发送* @param 字符串,数据字节个数* @retval */
static void ano_usart_send(uint8_t*str,uint16_t num)
{uint16_t cnt=0;do{HAL_UART_Transmit(&huart1,((uint8_t*)(str))+cnt,1,1000);cnt++;}while(cnt<=num);
}/*** @brief 通信帧结构体转化为线性数组* @param 要转换的通信帧,缓存数组* @retval **/
static void frame_turn_to_array(ano_frameStruct* frame,uint8_t*str)
{memcpy(str,(uint8_t*)frame,4);memcpy(str+4,(uint8_t*)frame->data,frame->data_len);memcpy(str+4+frame->data_len,(uint8_t*)(&frame->sum_check),2);
}/*** @brief 向上位机发送ASCII字符串* @param color:希望上位机显示的字符串颜色,str:要发送的字符串* @retval 无返回值*/
void ano_send_string(uint8_t color,char* str)
{uint8_t i=0,cnt=0;uint8_t buff[46]; memset(send_frame_struct.data,0,40);send_frame_struct.function_id=0XA0; //<信息输出--字符串(功能码0XA0)send_frame_struct.data[cnt++]=color; //<选择上位机打印的颜色/*字符串数据直接存入数据部分*/while(*(str+i)!='\0'){send_frame_struct.data[cnt++]=*(str+i++);if(cnt>40) //<若字符串长度超过40,强制结束break;}send_frame_struct.data_len=cnt; //<记录下数据部分长度ano_check_calculate(&send_frame_struct); //<计算校验和frame_turn_to_array(&send_frame_struct,buff); //<通信帧转线性数组ano_usart_send(buff,6+send_frame_struct.data_len);
}/*** @brief 向上位机发送ASCII字符串+数字组合* @param value:32位的数值,str:要发送的字符串* @retval */
void ano_send_message(char* str,int32_t value)
{uint8_t i=0,cnt=0;uint8_t buff[46]; memset(send_frame_struct.data,0,40);send_frame_struct.function_id=0XA1; //信息输出--字符串+数字/*协议规定VAL在前,先对要求的32位数据进行截断*/send_frame_struct.data[cnt++]=BYTE0(value);send_frame_struct.data[cnt++]=BYTE1(value);send_frame_struct.data[cnt++]=BYTE2(value);send_frame_struct.data[cnt++]=BYTE3(value);/*再轮到字符串数据*/while(*(str+i)!='\0'){send_frame_struct.data[cnt++]=*(str+i++);if(cnt>40)break;}send_frame_struct.data_len=cnt; //<记录下数据部分长度ano_check_calculate(&send_frame_struct); //<计算校验和frame_turn_to_array(&send_frame_struct,buff); //<通信帧转线性数组ano_usart_send(buff,6+send_frame_struct.data_len);
}/*** @brief 发送灵活格式帧* @param id:0xF1~0XFA,x_coordinate:x轴坐标值 ,y_coordinate:y轴坐标值* !!!要传多少个参数完全可以自己进行计算,最高只支持40字节的数据,低位先输出* 一般10个以内够用,40个字节限制,一个32位数据占4个字节,可以发送10个* @retval */
void ano_send_flexible_frame(uint8_t id,int32_t x_coordinate,int32_t y_coordinate)
{uint8_t buff[46];memset(send_frame_struct.data,0,40);send_frame_struct.function_id=id;send_frame_struct.data_len=8; //<根据自己的参数数填写 /*第一个x_coordinate数据从低位到高位截断*/send_frame_struct.data[0]=BYTE0(x_coordinate);send_frame_struct.data[1]=BYTE1(x_coordinate);send_frame_struct.data[2]=BYTE2(x_coordinate);send_frame_struct.data[3]=BYTE3(x_coordinate);/*第二个数据y_coordinate从低位到高位截断*/send_frame_struct.data[4]=BYTE0(y_coordinate);send_frame_struct.data[5]=BYTE1(y_coordinate);send_frame_struct.data[6]=BYTE2(y_coordinate);send_frame_struct.data[7]=BYTE3(y_coordinate);/*第N个数据xxx从低位到高位截断*///......用户自行添加ano_check_calculate(&send_frame_struct);frame_turn_to_array(&send_frame_struct,buff);ano_usart_send(buff,6+send_frame_struct.data_len);
}
在主函数中初始化ANDmessage驱动
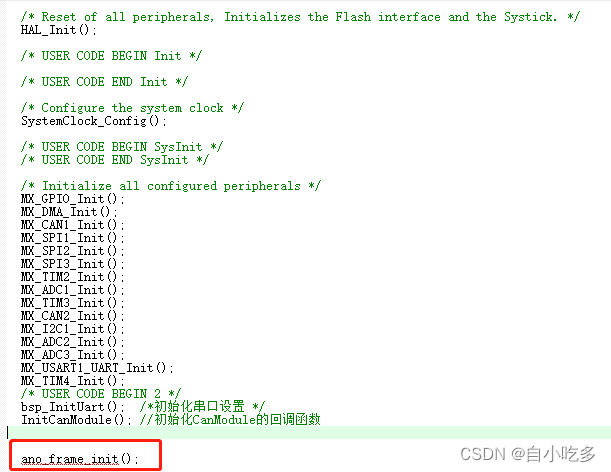
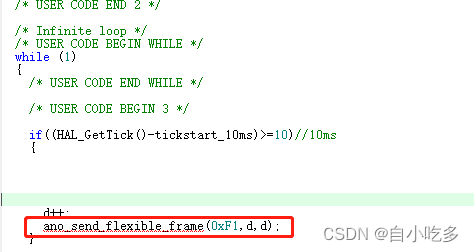
简单测试程序。在循环函数中添加一个变量发送给匿名上位机的数据,填写了一个随着时间变化一直自加的数据
连接匿名上位机V7
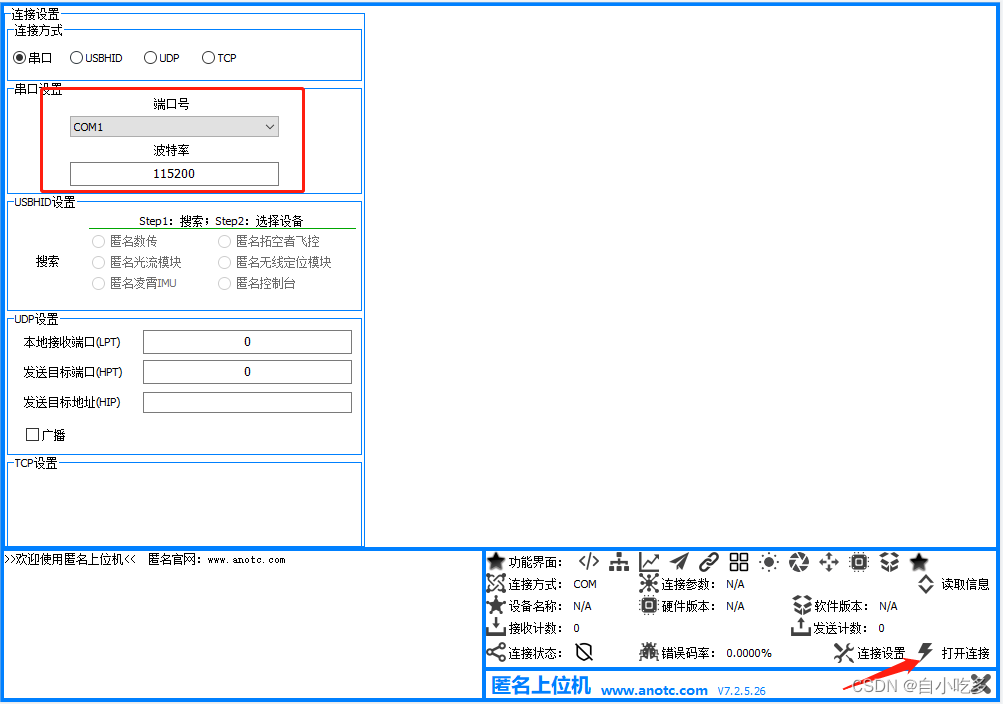
选择连接设置
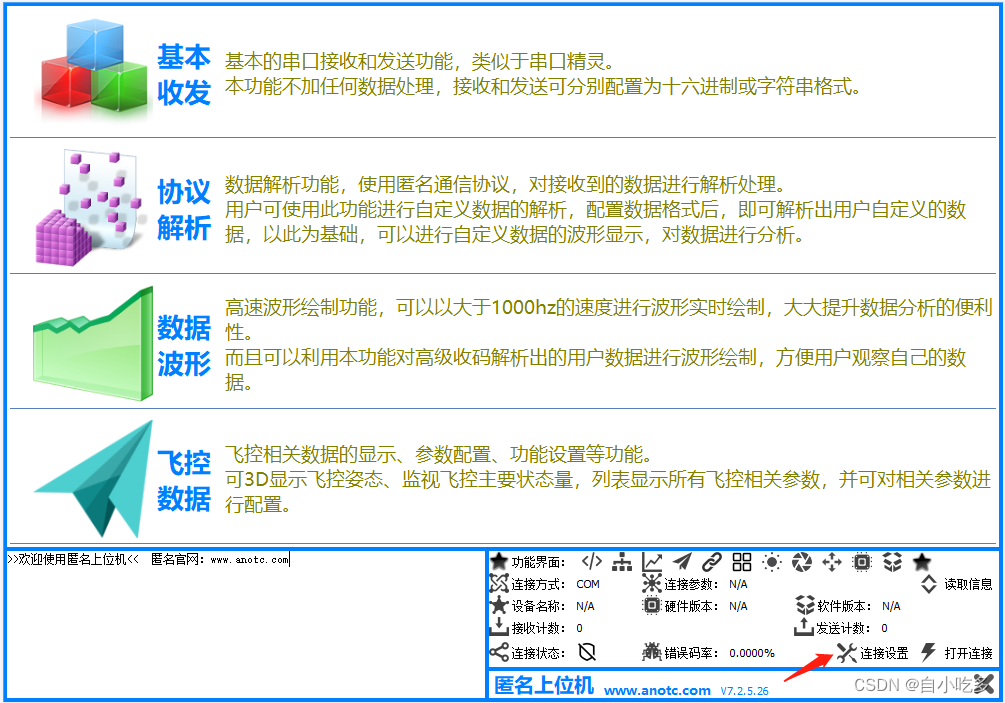
打开自己的硬件和程序所写的串口端号和波特率,后打开连接
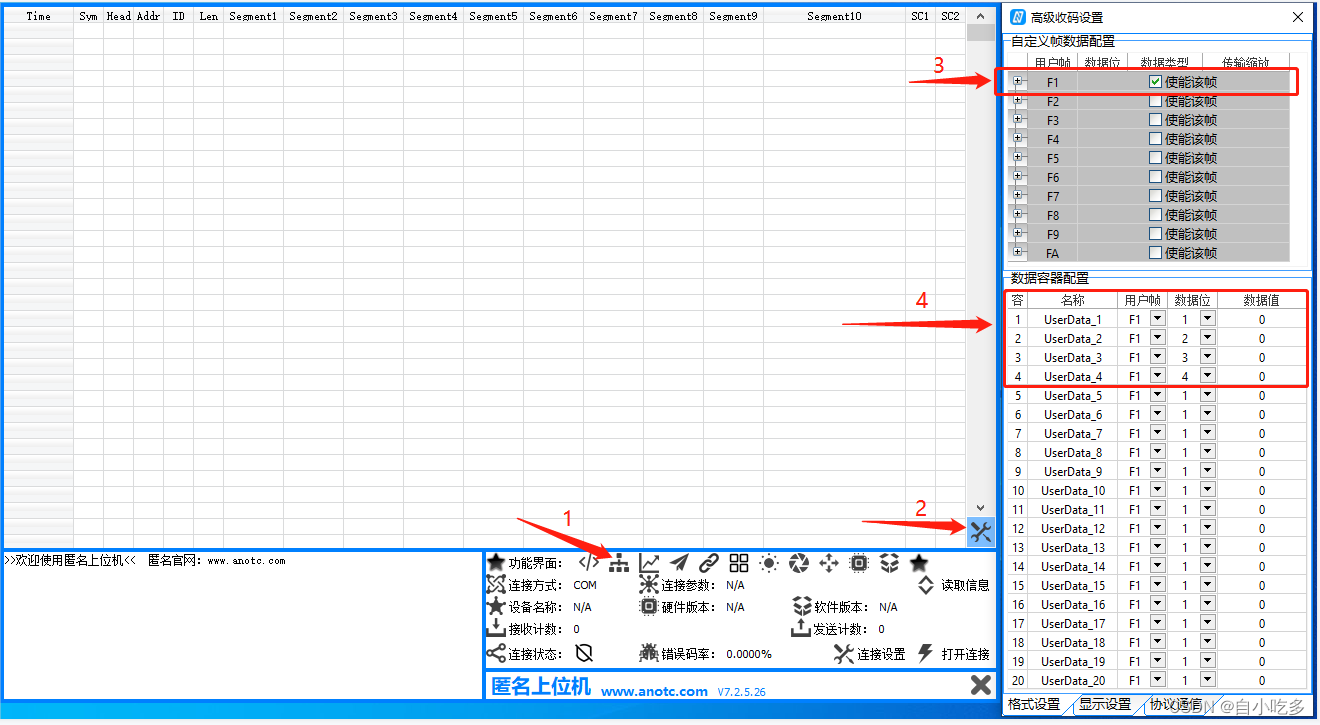
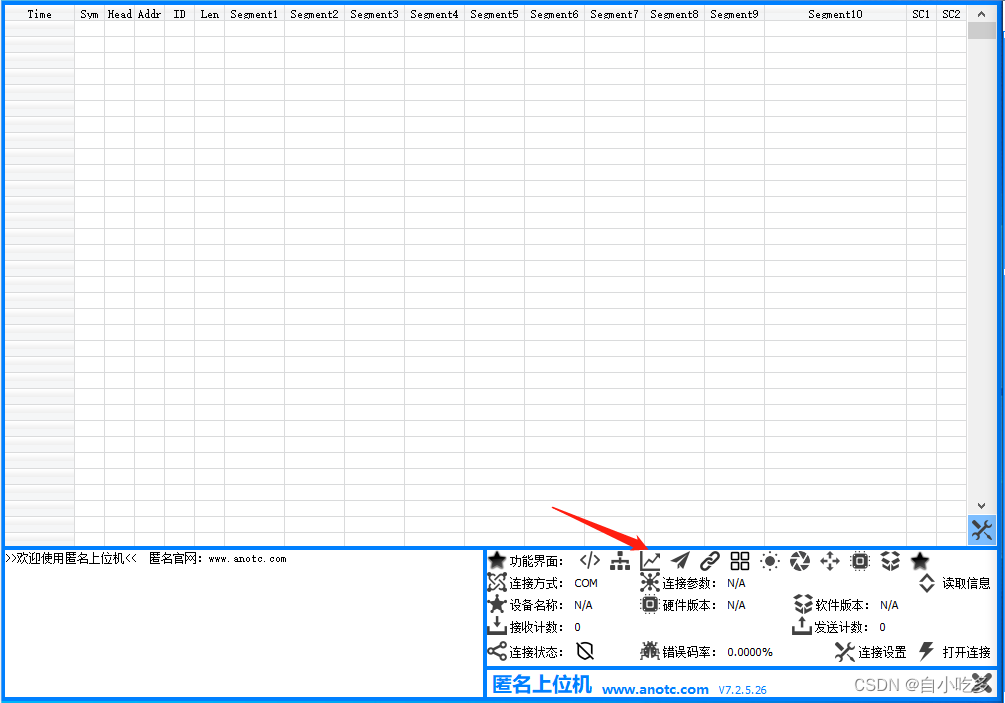
1.打开 协议解析 图标
2.选择扳手,弹出高级收码设置。
3.我们使用自定义的F1头帧,勾选使能该帧
4.数据容量配置,自行修改数据位 观察是否是我们需要的数值,1数据位表示8bit;2数据位表示16bit,以此类推
打开数据波形,弹出以下
波形显示框图
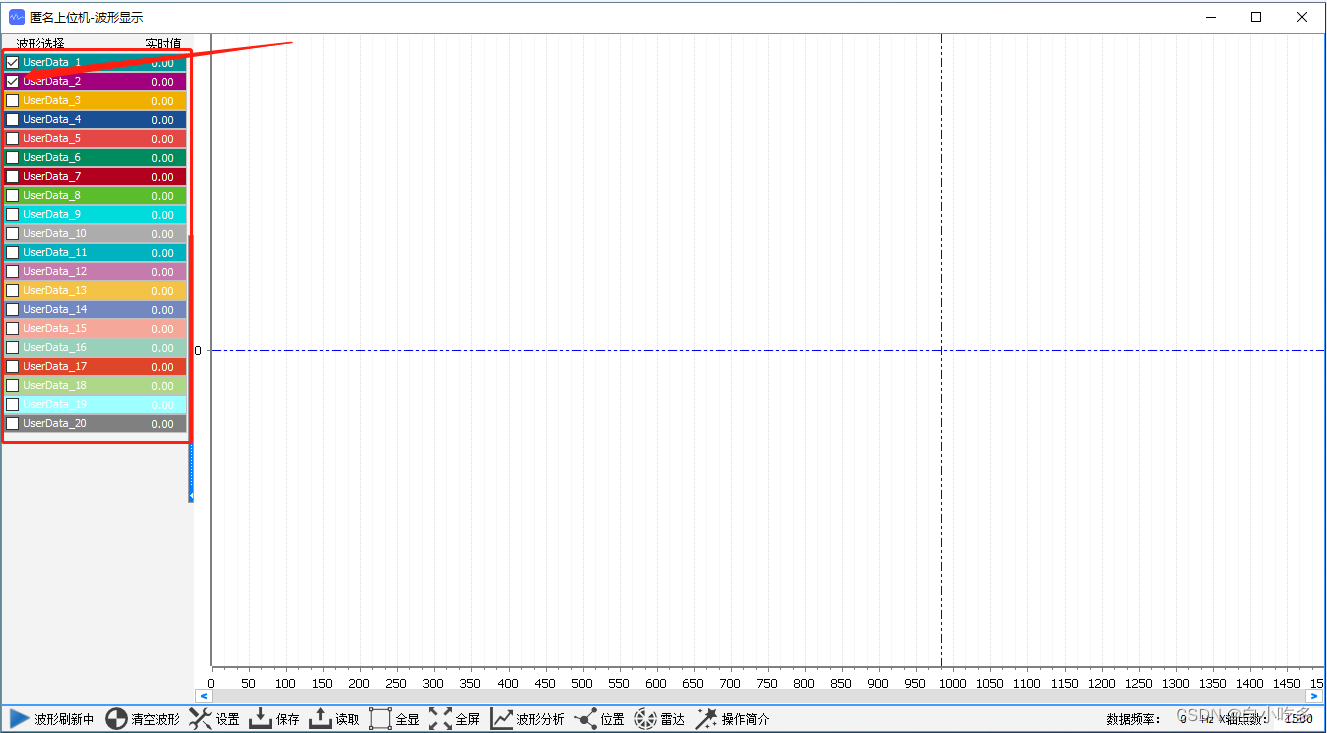
注意勾选要显示的波形,如果不清楚全勾选就行。注意左下角要显示“波形刷新中”才行。