文章目录
- 目的
- 核心代码
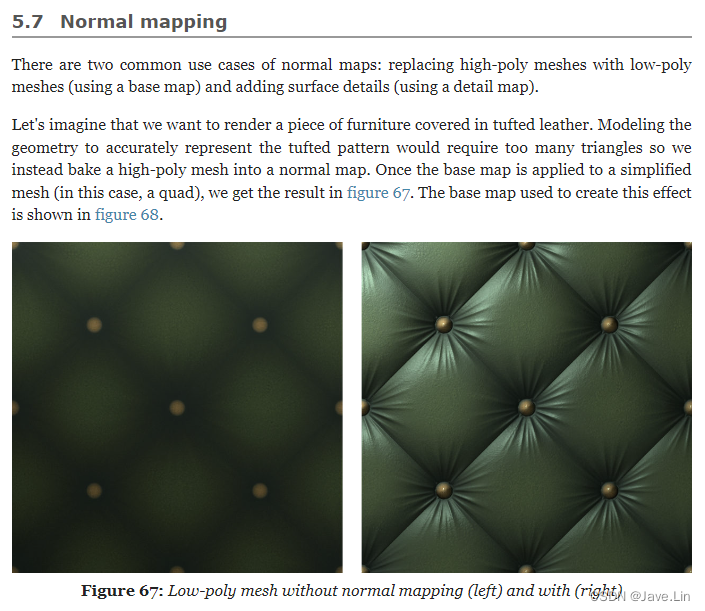
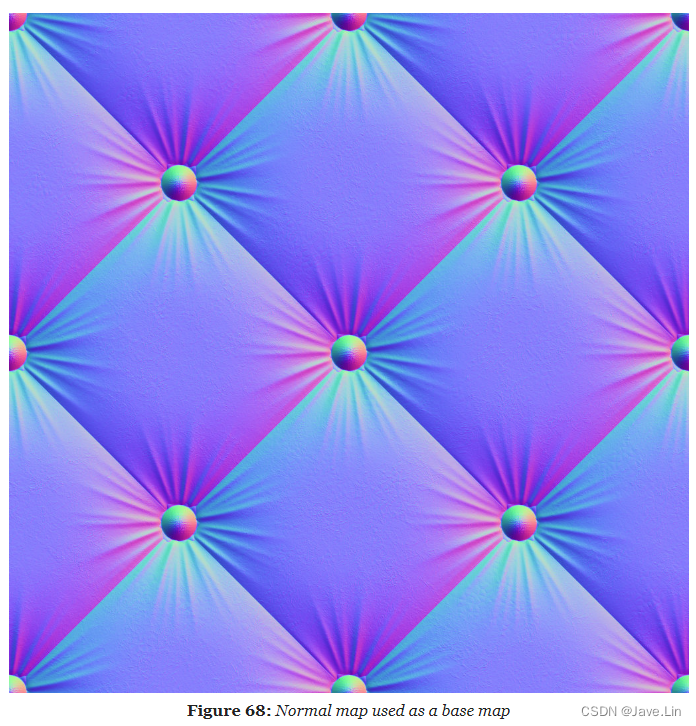
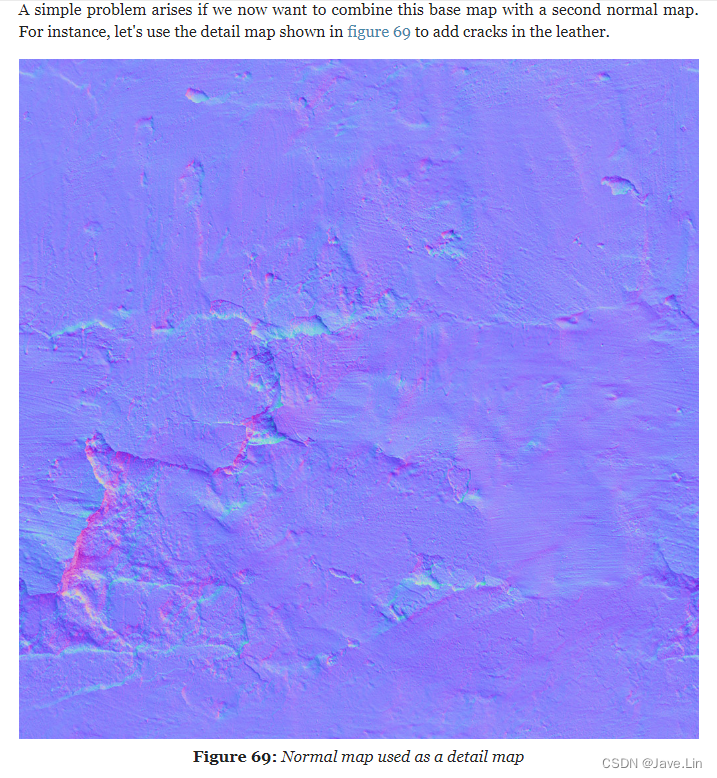
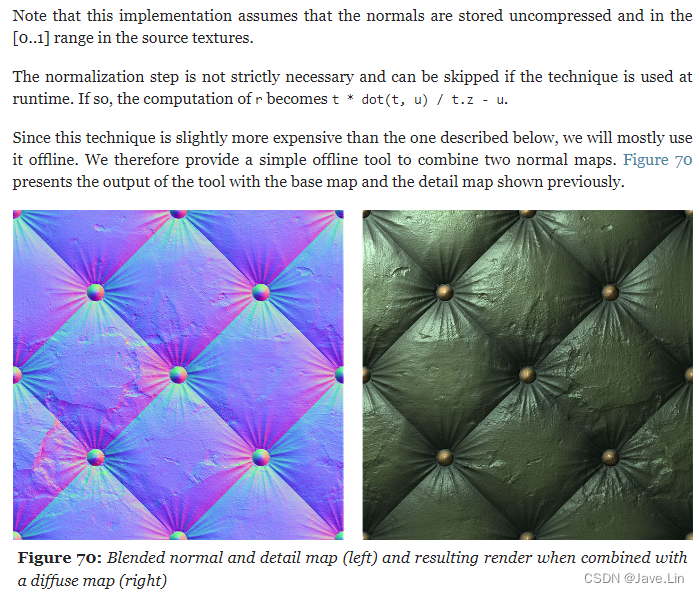
- PBR - Filament - Normal mapping
- Shader
- 效果
- BlendNormal_Hill12
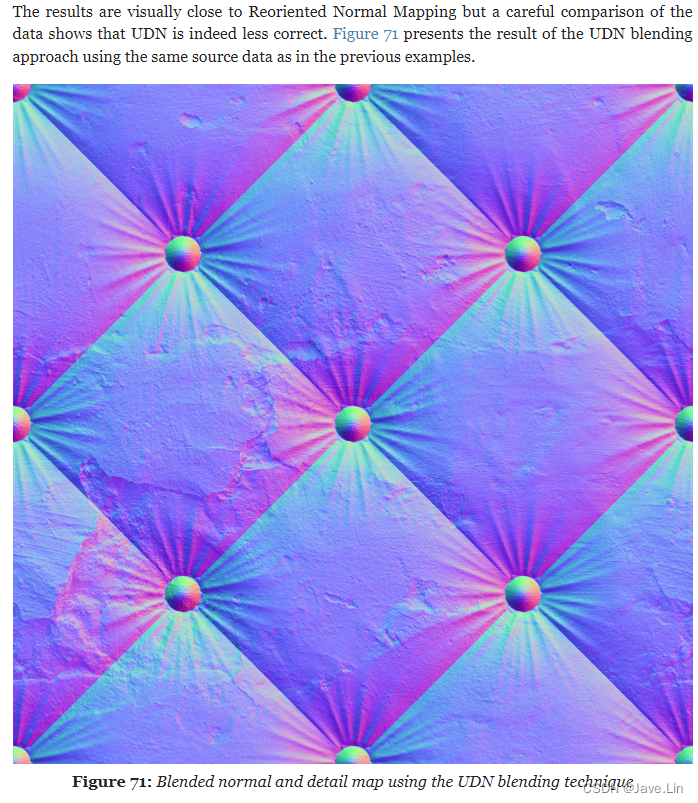
- BlendNormal_UDN
- BlendNormals_Unity_Native - 效果目前最好
- Project
- References
目的
备份、拾遗
核心代码
half3 blended_normal = normalize(half3(n1.xy + n2.xy, n1.z*n2.z));
PBR - Filament - Normal mapping
Shader
// jave.lin : 测试 法线重定向 (混合)Shader "Test/TestingNormalmapBlending"
{Properties{_MainTex ("Texture", 2D) = "white" {}_BumpMap ("Normal Map", 2D) = "bump" {}_BumpDetailMap ("Normal Detail Map", 2D) = "bump" {}_BumpBlending ("Bump Blending", Range(0.0, 1.0)) = 1.0}SubShader{Tags { "RenderType"="Opaque" }LOD 100Pass{CGPROGRAM#pragma vertex vert#pragma fragment frag#include "UnityCG.cginc"struct appdata{float4 vertex : POSITION;float2 uv : TEXCOORD0;half3 normal : NORMAL;half4 tangent : TANGENT; // xyz : dir, w : sign};struct v2f{float4 vertex : SV_POSITION;float2 uv : TEXCOORD0;half3 tangentWS : TEXCOORD1; // xyz : dir, w : view dir.yhalf3 normalWS : TEXCOORD2; // xyz : dir, w : view dir.xhalf3 binormalWS : TEXCOORD3; // xyz : dir, w : view dir.zfloat3 posWS : TEXCOORD4; // xyz : world position};sampler2D _MainTex;sampler2D _BumpMap;sampler2D _BumpDetailMap;float4 _MainTex_ST;fixed _BumpBlending;fixed4 _LightColor0;half3 CustomUnpackScaleNormal(half4 packednormal, half bumpScale){#if defined(UNITY_NO_DXT5nm)half3 normal = packednormal.xyz * 2 - 1;#if (SHADER_TARGET >= 30)// SM2.0: instruction count limitation// SM2.0: normal scaler is not supportednormal.xy *= bumpScale;#endifreturn normal;#elif defined(UNITY_ASTC_NORMALMAP_ENCODING)half3 normal;normal.xy = (packednormal.wy * 2 - 1);normal.z = sqrt(1.0 - saturate(dot(normal.xy, normal.xy)));normal.xy *= bumpScale;return normal;#else// This do the trickpackednormal.x *= packednormal.w;half3 normal;normal.xy = (packednormal.xy * 2 - 1);#if (SHADER_TARGET >= 30)// SM2.0: instruction count limitation// SM2.0: normal scaler is not supportednormal.xy *= bumpScale;#endifnormal.z = sqrt(1.0 - saturate(dot(normal.xy, normal.xy)));return normal;#endif} // end custom unpack scale normalv2f vert (appdata v){v2f o;o.vertex = UnityObjectToClipPos(v.vertex);o.uv = TRANSFORM_TEX(v.uv, _MainTex);float4 posWS = mul(unity_ObjectToWorld, v.vertex);half3 normalWS = UnityObjectToWorldNormal(v.normal);half4 tangentWS = half4(UnityObjectToWorldDir(v.tangent.xyz), v.tangent.w);half sign = tangentWS.w * unity_WorldTransformParams.w;half3 binormalWS = cross(normalWS, tangentWS) * sign;o.tangentWS = tangentWS.xyz;o.normalWS = normalWS.xyz;o.binormalWS = binormalWS.xyz;o.posWS.xyz = posWS.xyz;return o;}half3 BlendNormal_Hill12(half3 N1, half3 N2){return normalize(N1 * dot(N1, N2) - N2 * N1.z);}half3 BlendNormal_UDN(half3 N1, half3 N2){return normalize(half3(N1.xy + N2.xy, N1.z));}half3 BlendNormals_Unity_Native(half3 n1, half3 n2){return normalize(half3(n1.xy + n2.xy, n1.z*n2.z));}fixed4 frag (v2f i, fixed isFrontFace : VFACE) : SV_Target{half3 N = normalize(i.normalWS);N = isFrontFace >= 0 ? N : -N;half3 V = normalize(_WorldSpaceCameraPos - i.posWS.xyz);half3 T = normalize(i.tangentWS);half3 B = normalize(i.binormalWS);half3x3 TBN = half3x3(T, B, N);half3 N1_ts = CustomUnpackScaleNormal(tex2D(_BumpMap, i.uv.xy), 1.0);half3 N1 = mul(N1_ts, TBN);// return half4(N1.xyz, 1.0);half3 N2_ts = CustomUnpackScaleNormal(tex2D(_BumpDetailMap, i.uv.xy), 1.0);half3 N2 = mul(N2_ts, TBN);// return half4(N2.xyz, 1.0);// N = BlendNormal_Hill12(N1, N2);// N = BlendNormal_UDN(N1, N2);N = BlendNormals_Unity_Native(N1, N2); // jave.lin : 目前看着是: unity native 的效果是最好的N = lerp(N1, N, _BumpBlending);// return half4(N.xyz, 1.0);half3 L = _WorldSpaceLightPos0.xyz;half3 H = normalize(L + V);half NdotL = saturate(dot(N, L));half NdotH = saturate(dot(N, H));half diffuse = (NdotL);// return diffuse;half specular = pow((NdotH), 32) * 4.0;// return specular;fixed4 baseCol = tex2D(_MainTex, i.uv.xy);// half kd = 1 - specular;// diffuse *= kd;// return diffuse + specular;half3 finalCol = (diffuse + specular) * baseCol.rgb * _LightColor0.rgb + UNITY_LIGHTMODEL_AMBIENT.rgb * baseCol.rgb;return half4(finalCol.xyz, 1.0);}ENDCG}}
}效果
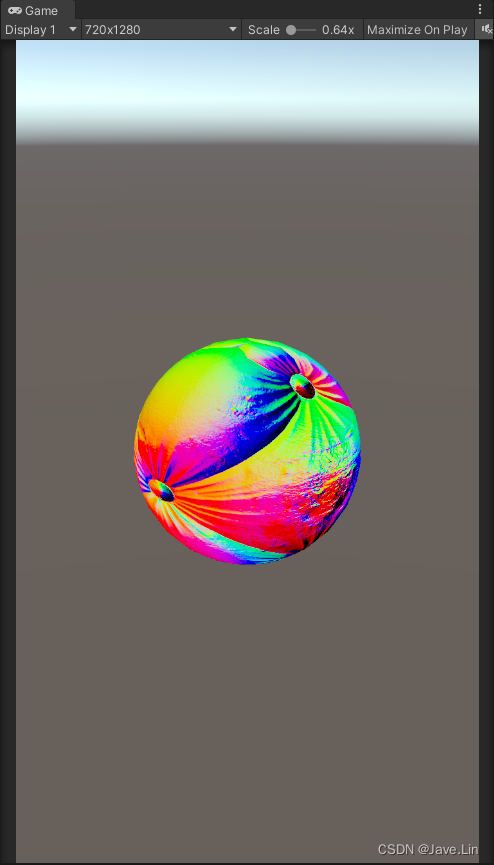
half3 N1_ts = CustomUnpackScaleNormal(tex2D(_BumpMap, i.uv.xy), 1.0);half3 N1 = mul(N1_ts, TBN);// return half4(N1.xyz, 1.0);half3 N2_ts = CustomUnpackScaleNormal(tex2D(_BumpDetailMap, i.uv.xy), 1.0);half3 N2 = mul(N2_ts, TBN);// return half4(N2.xyz, 1.0);N = BlendNormal_Hill12(N1, N2);// N = BlendNormal_UDN(N1, N2);// N = BlendNormals_Unity_Native(N1, N2); // jave.lin : 目前看着是: unity native 的效果是最好的N = lerp(N1, N, _BumpBlending);return half4(N.xyz, 1.0);
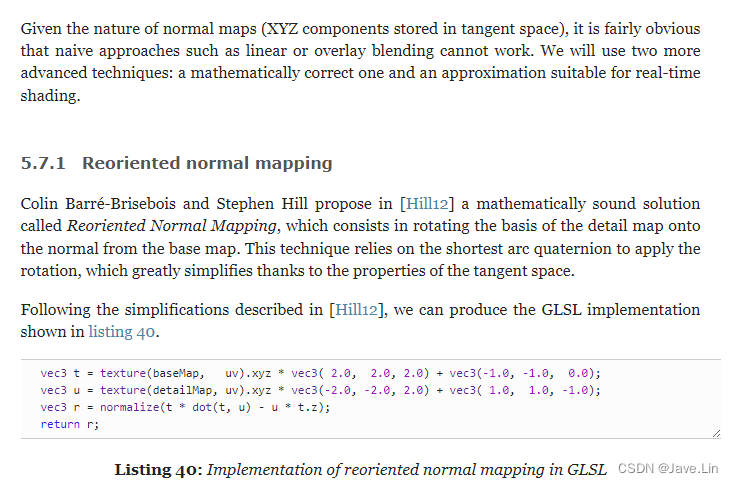
BlendNormal_Hill12
half3 BlendNormal_Hill12(half3 N1, half3 N2){return normalize(N1 * dot(N1, N2) - N2 * N1.z);}
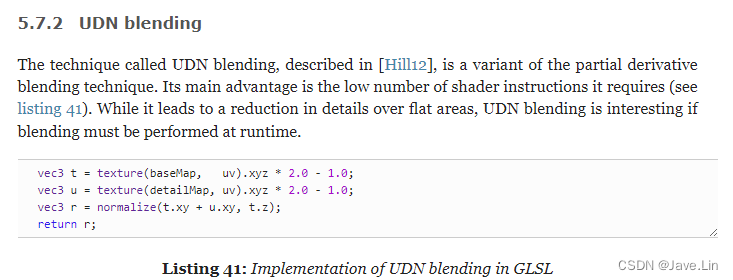
BlendNormal_UDN
half3 BlendNormal_UDN(half3 N1, half3 N2){return normalize(half3(N1.xy + N2.xy, N1.z));}
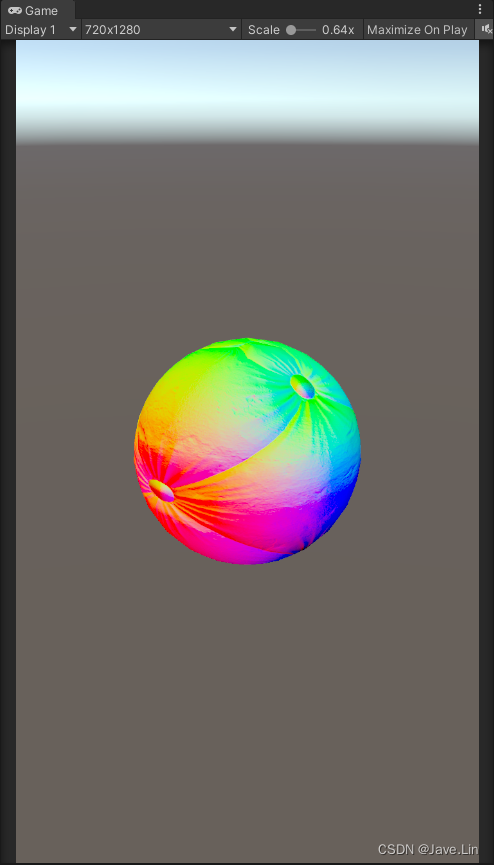
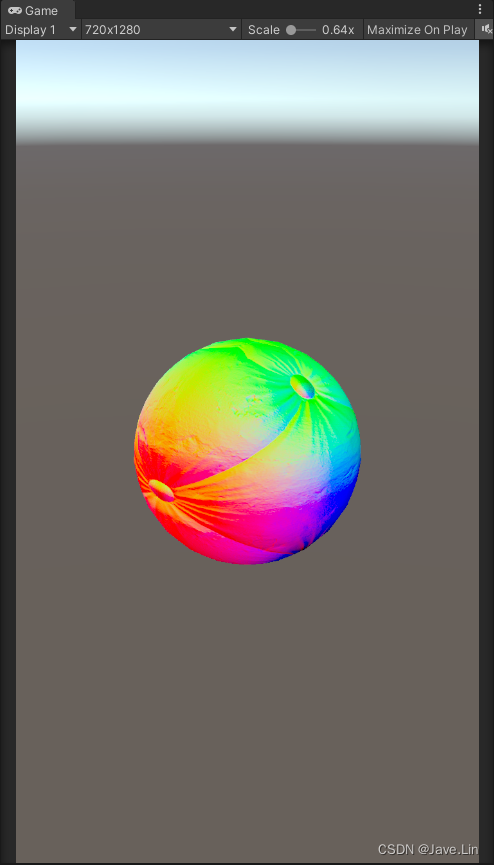
BlendNormals_Unity_Native - 效果目前最好
half3 BlendNormals_Unity_Native(half3 n1, half3 n2){return normalize(half3(n1.xy + n2.xy, n1.z*n2.z));}
Project
Testing_NormalMap_Blending_2023.3.37f1_BRP.rar
提取码:ozgt
References
- PBR filament normal mapping