cd /opt/ros/noetic/rosdistro/rosdep/sources.list.d/
sudo gedit 20-default.list
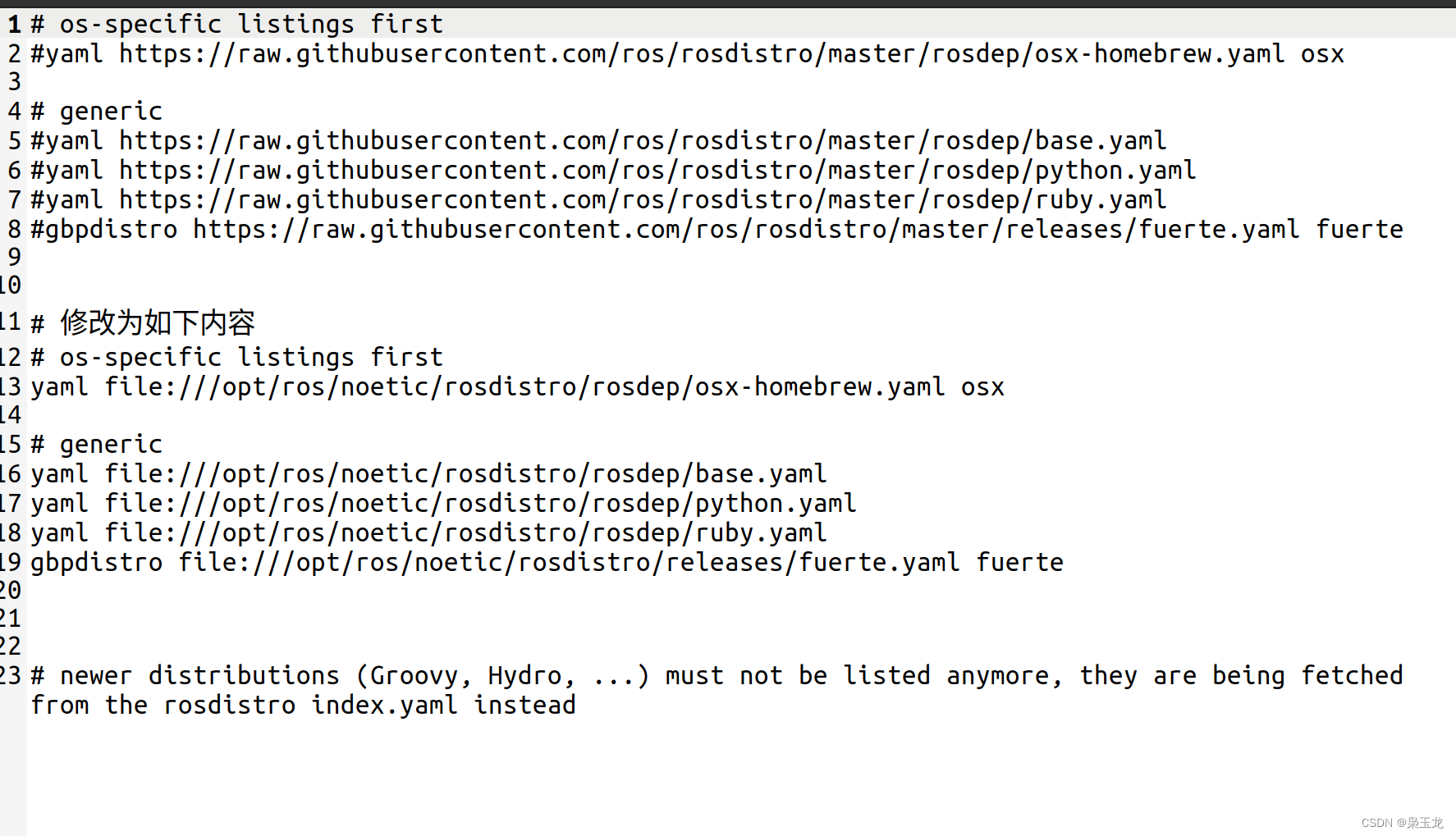
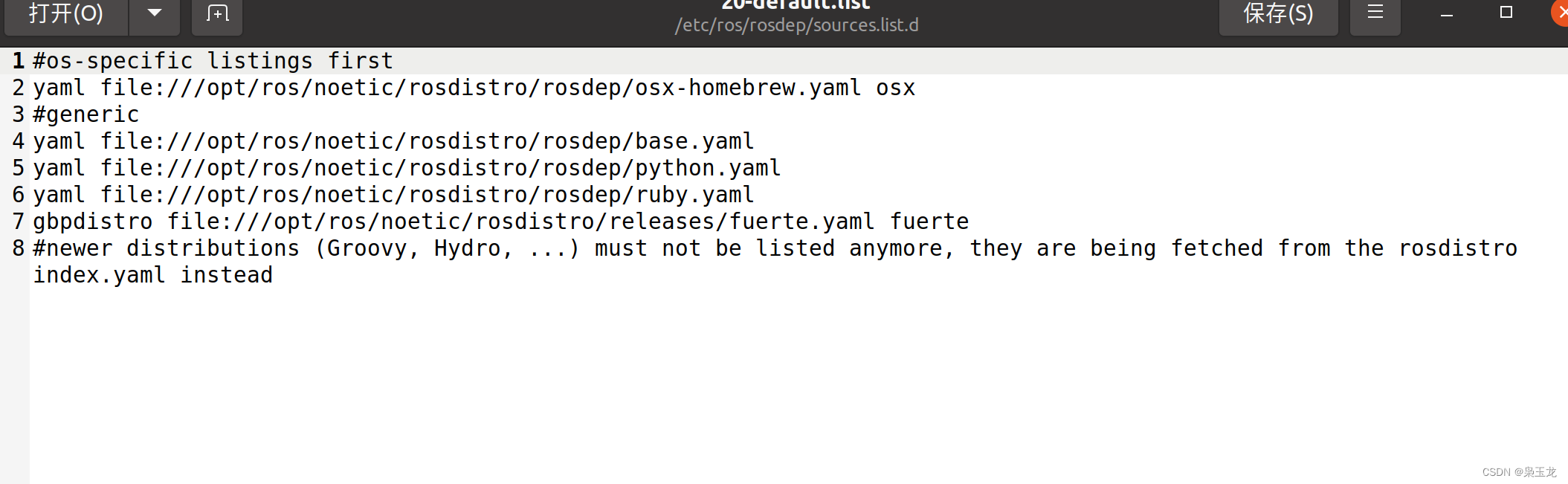
1.1修改为如下内容
#os-specific listings first
yaml file:///opt/ros/noetic/rosdistro/rosdep/osx-homebrew.yaml osx#generic
yaml file:///opt/ros/noetic/rosdistro/rosdep/base.yaml
yaml file:///opt/ros/noetic/rosdistro/rosdep/python.yaml
yaml file:///opt/ros/noetic/rosdistro/rosdep/ruby.yaml
gbpdistro file:///opt/ros/noetic/rosdistro/releases/fuerte.yaml fuerte#newerdistributions(Groovy, Hydro,...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
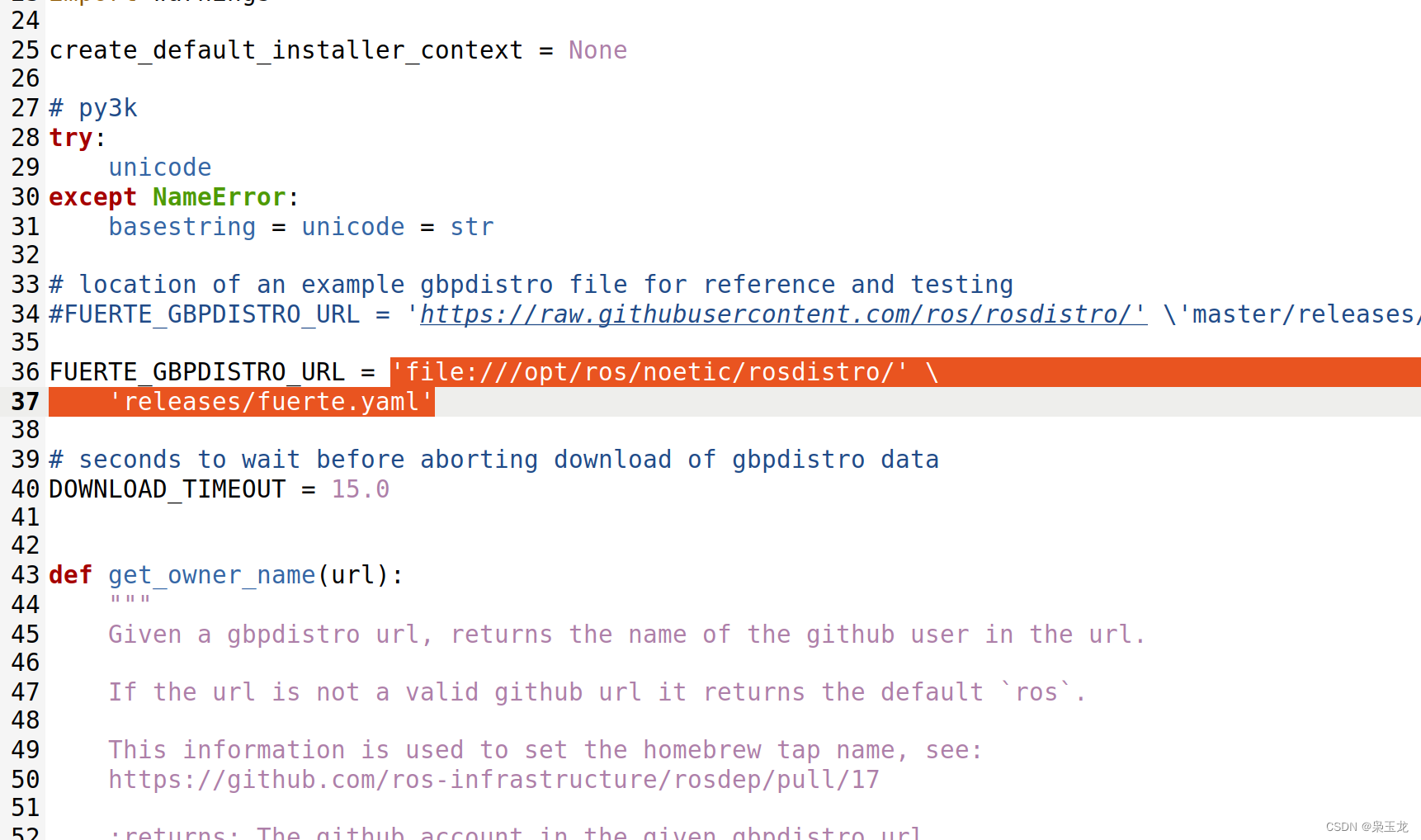
2:修改文件2:gbpdistro_support.py
cd /usr/lib/python3/dist-packages/rosdep2/
sudo gedit gbpdistro_support.py
sudo mkdir -p /etc/ros/rosdep/sources.list.d
cd /etc/ros/rosdep/sources.list.d
sudo gedit 20-default.list# 在文件中添加如下内容
#os-specific listings first
yaml file:///opt/ros/noetic/rosdistro/rosdep/osx-homebrew.yaml osx#generic
yaml file:///opt/ros/noetic/rosdistro/rosdep/base.yaml
yaml file:///opt/ros/noetic/rosdistro/rosdep/python.yaml
yaml file:///opt/ros/noetic/rosdistro/rosdep/ruby.yaml
gbpdistro file:///opt/ros/noetic/rosdistro/releases/fuerte.yaml fuerte#newerdistributions(Groovy, Hydro,...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
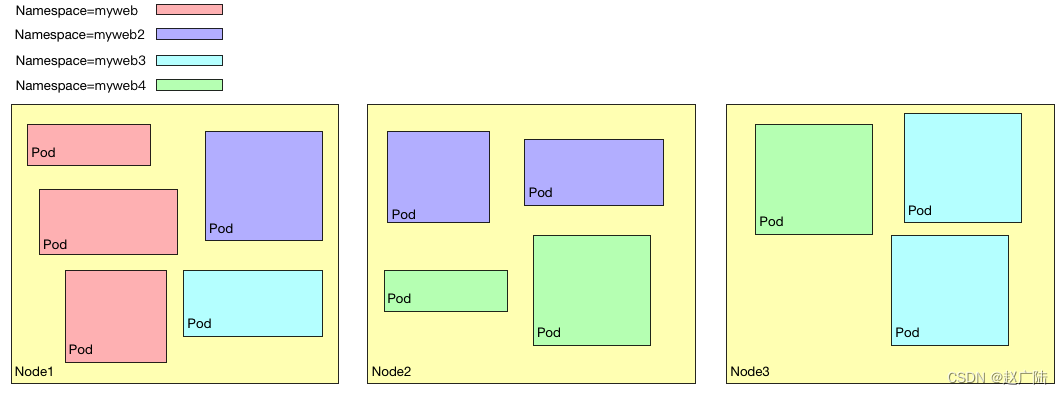
MySQL 主从复制 1、什么是读写分离? 读写分离,基本的原理是让主数据库处理事务性增、改、删操作(INSERT、UPDATE、DELETE),而从数据库处理SELECT查询操作。数据库复制被用来把事务性操作导致的变更同步到集群中的从数据…


![MySQL 主从复制[异步 同步 半同步复制] 读写分离 优化 (非常重要)](https://img-blog.csdnimg.cn/c4ec3cf08efe4ad2a59d07ab1a5ba00d.png)