赛题介绍
建立站点充电量预测模型,根据充电站的相关信息和历史电量数据,准确预测未来某段时间内充电站的充电量需求。
在赛题数据中,我们提供了电动汽车充电站的场站编号、位置信息、历史电量等基本信息。我们鼓励参赛选手在已有数据的基础上补充或构造额外的特征,以获得更好的预测性能
赛题任务
根据赛题提供的电动汽车充电站多维度脱敏数据,构造合理特征及算法模型,预估站点未来一周每日的充电量。(以天为单位),属于典型的回归问题。
数据集
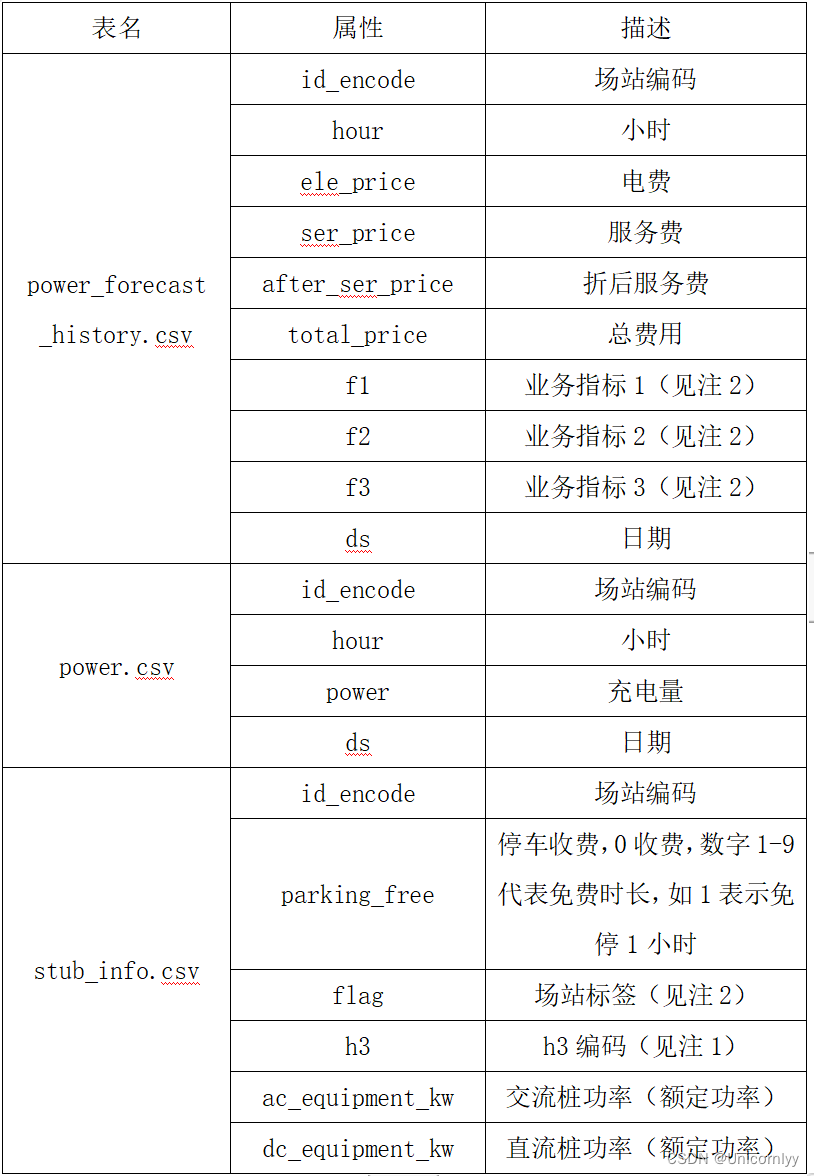
本赛题提供的数据集包含三张数据表。
其中,power_forecast_history.csv 为站点运营数据,power.csv为站点充电量数据,stub_info.csv为站点静态数据,训练集为历史一年的数据,测试集为未来一周的数据。
以下是本次赛题数据集的字段说明:
数据集下载

评估指标
评估指标:RMSE(均方根误差)

均方根误差是预测值与真实值偏差的平方与观测次数n比值的平方根。
衡量的是预测值与真实值之间的偏差,并且对数据中的异常值较为敏感,受异常值的影响更大,所以要想好如何处理异常值上分。
常用于评测回归任务,常用来作为机器学习模型预测结果衡量的标准。
与MSE的区别
MSE是真实值与预测值的差值的平方然后求和平均。通过平方的形式便于求导,所以常被用作线性回归的损失函数。
MAE对异常值不敏感,但它不能反映预测误差的分布情况。
RMSE放大了较大误差之间的差距,此外,RMSE计算后的结果与实际值的单位相同,而MSE的结果是实际值单位的平方。因此,如果我们要直观地了解模型的预测误差,通常会使用RMSE作为指标。
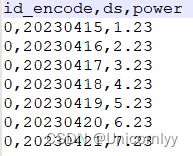
提交示例
过拟合与欠拟合
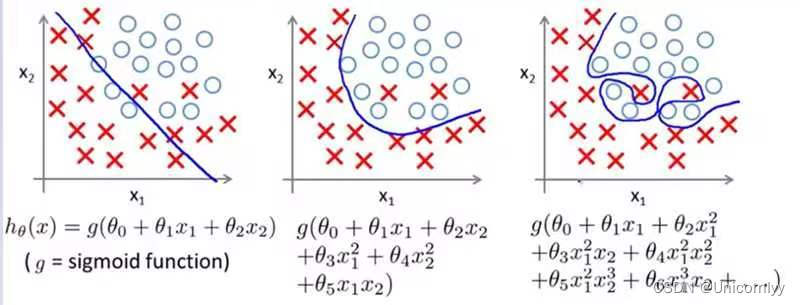
第一个欠拟合,第二个正常,第三个过拟合
欠拟合:欠拟合是指模型不能在训练集上获得足够低的误差。换句换说,就是模型复杂度低,模型在训练集上就表现很差,没法学习到数据背后的规律。
如何解决欠拟合?
欠拟合基本上都会发生在训练刚开始的时候,经过不断训练之后欠拟合应该不怎么考虑了。但是如果真的还是存在的话,可以通过增加网络复杂度或者在模型中增加特征,这些都是很好解决欠拟合的方法。
过拟合:过拟合是指训练误差和测试误差之间的差距太大。换句换说,就是模型复杂度高于实际问题,模型在训练集上表现很好,但在测试集上却表现很差。模型对训练集"死记硬背"(记住了不适用于测试集的训练集性质或特点),没有理解数据背后的规律,泛化能力差
为什么会出现过拟合现象?
造成原因主要有以下几种:
- 训练数据集样本单一,样本不足。如果训练样本只有负样本,然后那生成的模型去预测正样本,这肯定预测不准。所以训练样本要尽可能的全面,覆盖所有的数据类型。
- 训练数据中噪声干扰过大。噪声指训练数据中的干扰数据。过多的干扰会导致记录了很多噪声特征,忽略了真实输入和输出之间的关系。
- 模型过于复杂。模型太复杂,已经能够“死记硬背”记下了训练数据的信息,但是遇到没有见过的数据的时候不能够变通,泛化能力太差。我们希望模型对不同的模型都有稳定的输出。模型太复杂是过拟合的重要因素。
如何解决过拟合?
要想解决过拟合问题,就要显著减少测试误差而不过度增加训练误差,从而提高模型的泛化能力。我们可以使用正则化(Regularization)方法。
常用的正则化方法根据具体的使用策略不同可分为:(1)直接提供正则化约束的参数正则化方法,如L1/L2正则化;(2)通过工程上的技巧来实现更低泛化误差的方法,如提前终止(Early stopping)和Dropout;(3)不直接提供约束的隐式正则化方法,如数据增强等。
正常拟合:模型的正常拟合是指训练得到的模型,可以从训练数据集上学习得到了泛化能力强、预测误差小的模型,同时该模型还可以针对待测试的数据进行良好的预测,获得令人满意的预测效果。
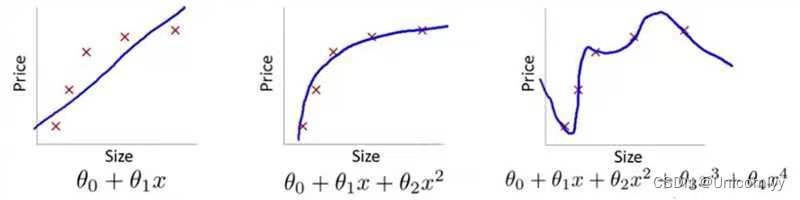
三种情况在训练数据集上的预测误差的表现形式为:欠拟合>正常拟合>过拟合;而在测试集上的预测误差形式为:欠拟合>过拟合>正常拟合。
所以下面这张也是第一个欠拟合,第二个正常拟合,第三个过拟合
在机器学习中,以下哪些技术是数据清洗的相关技术?
A去除重复数据
B处理缺失数据
C异常值处理
D数据标准化/归一化
数据清洗是将重复、多余的数据筛选清除,将缺失的数据补充完整,将错误的数据纠正或者删除,最后整理成为我们可以进一步加工、使用的数据。
数据清洗的一般步骤:分析数据、缺失值处理、异常值处理、去重处理、噪音数据处理。在大数据生态圈,有很多来源的数据ETL工具,但是对于公司内部来说,稳定性、安全性和成本都是必须考虑的。
baseline解读
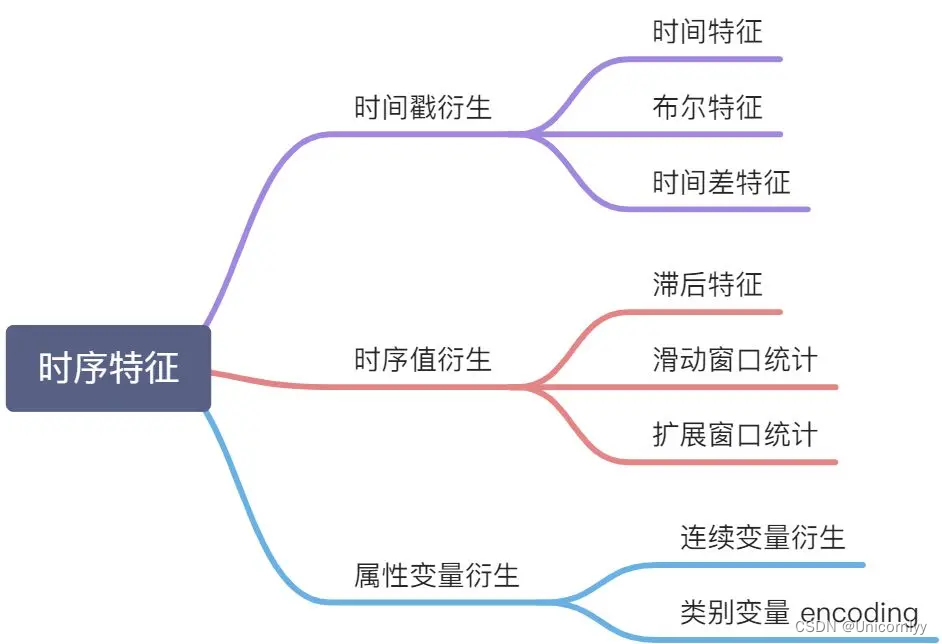
对于常见的时序问题,我们可以采用历史平移、滑窗统计,尽可能的提取时间特征等方法进行特征工程。
增加工作日非工作日特征
df['weekday'] = df_copy[col].dt.weekday
df['is_weekend'] = df['weekday'].isin([5, 6]).astype(int)
df['is_workday'] = (df['weekday'] < 5).astype(int)
增加小时,分钟特征
df_copy[prefix + 'hour'] = df_copy[col].dt.hour
df_copy[prefix + 'minute'] = df_copy[col].dt.minute
相对时间差特征
df['diff_from_start'] = (df_copy[col] - df_copy[col].iloc[0]).dt.days
df['diff_to_end'] = (df_copy[col].iloc[-1] - df_copy[col]).dt.days
构建了历史平移特征、差分特征、和窗口统计特征
(1)历史平移特征:通过历史平移获取上个阶段的信息;
(2)差分特征:可以帮助获取相邻阶段的增长差异,描述数据的涨减变化情况。在此基础上还可以构建相邻数据比值变化、二阶差分等;
(3)窗口统计特征:窗口统计可以构建不同的窗口大小,然后基于窗口范围进统计均值、最大值、最小值、中位数、方差的信息,可以反映最近阶段数据的变化情况。
# 合并训练数据和测试数据
df = pd.concat([train_df, test_df], axis=0).reset_index(drop=True)# 历史平移
for i in range(7,36):df[f'power_shift{i}'] = df.groupby('id_encode')['power'].shift(i)window_size = 7# 历史平移 + 差分特征
for i in range(1,4):df[f'power_shift7_diff{i}'] = df.groupby('id_encode')['power_shift7'].diff(i)# 窗口统计
for win in [7,14,28,35,50,70]:df[f'power_win{win}_mean'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').mean().valuesdf[f'power_win{win}_median'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').median().valuesdf[f'power_win{win}_max'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').max().valuesdf[f'power_win{win}_min'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').min().valuesdf[f'power_win{win}_std'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').std().values# 历史平移 + 窗口统计
for win in [7,14,28,35,50,70]:df[f'power_shift7_win{win}_mean'] = df.groupby('id_encode')['power_shift7'].rolling(window=win, min_periods=3, closed='left').mean().valuesdf[f'power_win{win}_median'] = df.groupby('id_encode')['power'].rolling(window=win, min_periods=3, closed='left').median().valuesdf[f'power_shift7_win{win}_max'] = df.groupby('id_encode')['power_shift7'].rolling(window=win, min_periods=3, closed='left').max().valuesdf[f'power_shift7_win{win}_min'] = df.groupby('id_encode')['power_shift7'].rolling(window=win, min_periods=3, closed='left').min().valuesdf[f'power_shift7_win{win}_sum'] = df.groupby('id_encode')['power_shift7'].rolling(window=win, min_periods=3, closed='left').sum().valuesdf[f'power_shift7_win{win}_std'] = df.groupby('id_encode')['power_shift7'].rolling(window=win, min_periods=3, closed='left').std().values
lgbm参数详解
# 定义lightgbm参数params = {'boosting_type': 'gbdt',#提升树的类型。值为 'gbdt' 表示梯度提升决策树'objective': 'regression',#损失函数。这里是回归问题,所以选用回归损失函数,即 'regression'。'metric': 'rmse',#评价指标。衡量模型性能的指标,这里使用均方根误差(RMSE)作为评价指标。'min_child_weight': 5,#一个叶子节点最小的样本权重和。用来控制过拟合。如果这个值过高,则会导致欠拟合,反之则会导致过拟合。'num_leaves': 2 ** 5,#决策树上的叶子节点数。这个参数通常比较敏感,其值越大,模型越复杂,容易过拟合。'lambda_l2': 10,#L2 正则化系数。增加这个值可以减少模型的复杂度,防止过拟合。'feature_fraction': 0.8,#训练每棵树时,使用的特征比例。设置该参数可以防止过拟合,提高模型的泛化能力。'bagging_fraction': 0.8,#构造每棵树所使用的数据比例,通常选取比较小的值,和 feature_fraction 一起使用,可以控制模型的复杂度。'bagging_freq': 4,#执行 bagging 操作的频率。设置为 0 表示不使用 bagging 操作。'learning_rate': 0.05,#学习率。控制每次迭代调整的步长。如果设置的学习率过大,则可能无法收敛,如果设置的学习率过小,则可能需要较长时间才能得到最终结果。'seed': 2023,#随机种子。设定一个随机种子,可以保证结果的可重复性。'nthread' : 16,#线程数。LGBM 中多线程并行计算提高了训练速度,该参数用来指定线程数。'verbose' : -1,#是否打印调试信息。设置为 -1 时不打印任何信息。# 'device':'gpu'}lgbm参数详解
pandas_profiling简介
python库:pandas_profiling,这个库只需要一行代码就可以生成数据EDA报告。
基于pandas的DataFrame数据类型,可以简单快速地进行探索性数据分析
对于数据集的每一列,pandas_profiling会提供以下统计信息:
1、概要:数据类型,唯一值,缺失值,内存大小
2、分位数统计:最小值、最大值、中位数、Q1、Q3、最大值,值域,四分位
3、描述性统计:均值、众数、标准差、绝对中位差、变异系数、峰值、偏度系数
4、最频繁出现的值,直方图/柱状图
5、相关性分析可视化:突出强相关的变量,Spearman, Pearson矩阵相关性色阶图
并且这个报告可以导出为HTML,非常方便查看。对不太熟悉python数据分析的新手来说十分友好。
安装:
pip install pandas-profiling
使用pandas_profiling生成数据探索报告:
report = pp.ProfileReport(data)
report
导出为html文件
report.to_file('report.html')
“H3” 是一个用于地理空间索引和网格系统的开源库。它将地球表面划分为一系列分辨率逐渐变粗的六边形单元格,每个单元格都有唯一的标识符,称为 H3 地址。H3 地址可以表示不同级别的地理区域,例如国家、城市、街区等。
要将 H3 地址转换为地理坐标(经度和纬度),可以使用 H3 库中的函数
安装
pip install h3-python
示例代码
import h3h3_address = '8928308280fffff' # 示例 H3 地址coordinates = h3.h3_to_geo(h3_address)latitude = coordinates[0]
longitude = coordinates[1]print("Latitude:", latitude)
print("Longitude:", longitude)
数据探索
fromDatawhale直播一禧助教
df['new_date'] = pd.to_datetime(df['ds']* 100 + df['ds_hour'].astype(int), format='%Y%m%d%H')
df['ds_date'] = df['new_date'].dt.date
############################ 绘图函数
def my_plot(df, id_encode, start_date, end_date, groupby, predict=False): # 绘制折线图fig = plt.figure(figsize=(20,10))df = df.loc[(df['ds'] >= start_date) & (df['ds'] <= end_date)]if id_encode > -1:df = df.loc[df['id_encode'] == id_encode]else:passif groupby == 'hour':plt.plot(df['new_date'], df['power'], color = 'blue')if predict == True:plt.plot(df['new_date'], df['power_pre'], color = 'red')try:plt.plot(df['new_date'], df['temp_max'], color = 'brown')plt.plot(df['new_date'], df['temp_min'], color = 'green')except:passelif groupby == 'day':df_power = df.groupby(by = 'ds_date')['power'].sum().reset_index()plt.plot(df_power['ds_date'], df_power['power'], color = 'blue')if predict == True:df_power_pre = df.groupby(by = 'ds_date')['power_pre'].sum().reset_index()plt.plot(df_power_pre['ds_date'], df_power_pre['power_pre'], color = 'red')# 添加标题和轴标签plt.title('Power vs Date')plt.xlabel('Date')plt.ylabel('Power')# 显示图形plt.show()
我这里按照助教说的画了两个图
my_plot(df, id_encode=-1, start_date=20220401, end_date=20230610, groupby='day')
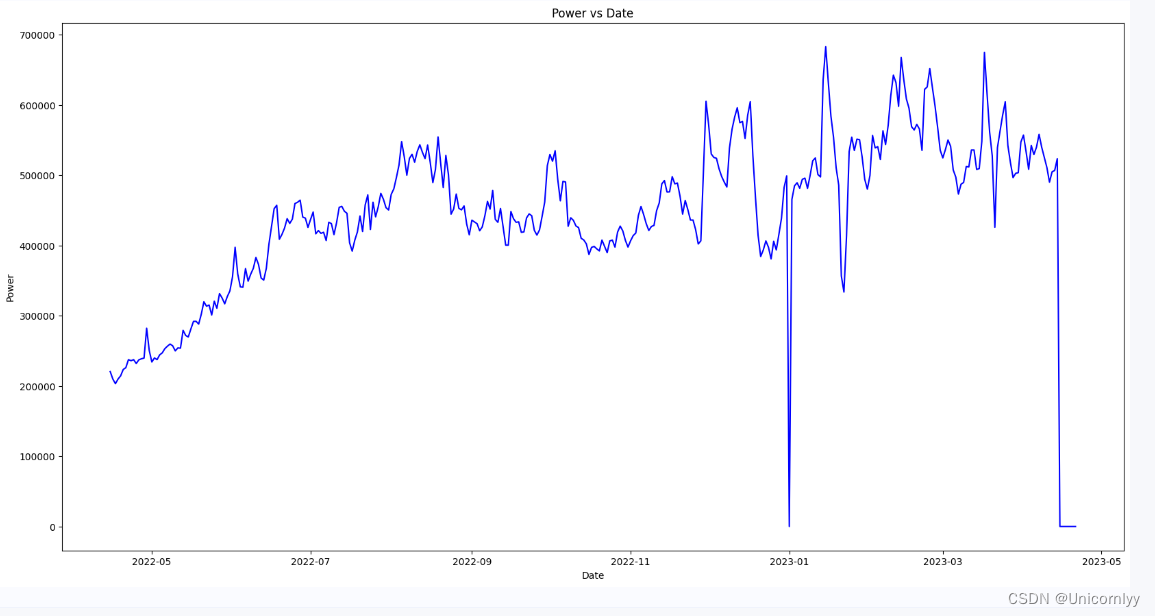
202301应该是春节期间大年30大家都回乡下城市的充电量下降
my_plot(df, id_encode=-1, start_date=20230301, end_date=20230610, groupby='day')
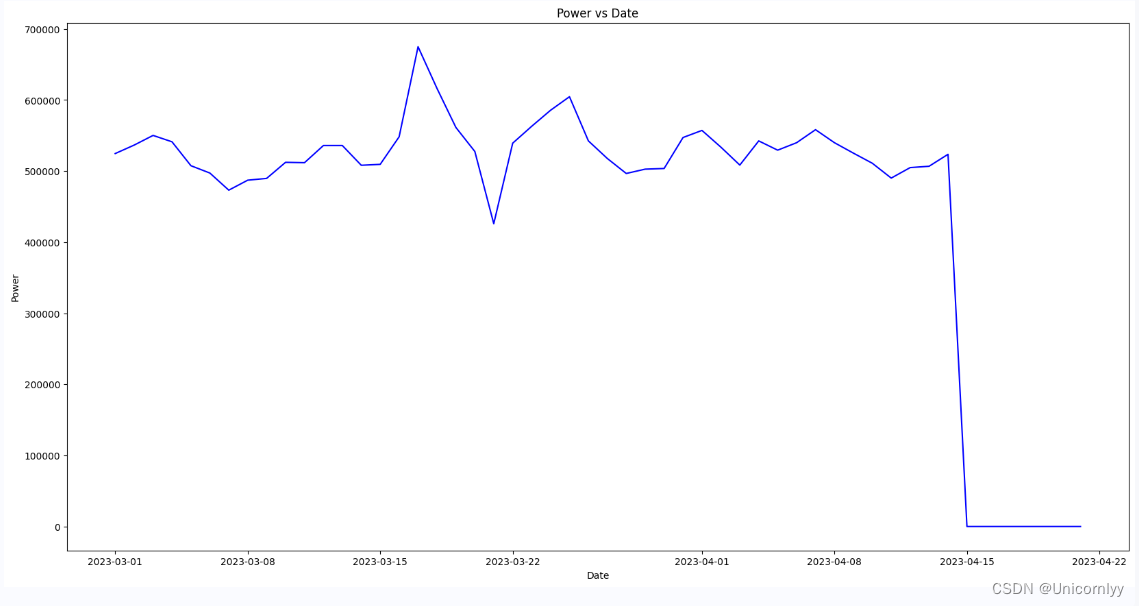
20230322是因为寒潮所以有所下降
然后助教还说了可以将h3转换为经纬度,但因为我这边不太懂暂时还没有尝试这种方法
我这边使用sklearn库中的LabelEncoder类来对数据进行标签编码(Label Encoding)操作
from sklearn.preprocessing import LabelEncoder
le = LabelEncoder()
train_df['h3'] = le.fit_transform(train_df['h3'])
test_df['h3'] = le.fit_transform(test_df['h3'])
但是似乎效果不是特别好