提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、实习目的
- 二、实习任务
- 2.1 设计温度测量报警系统硬件电路
- 2.2 温度测量报警系统软件编程、仿真与调试;
- 2.3 完成温度测量报警系统的实物制作与调试;
- 三、 实习内容及实习成果
- 3.1 温度测量报警系统的功能要求
- 3.2 温度测量报警系统的设计方法
- 3.3 温度测量报警系统的设计过程
- 3.3.1 proteus仿真原理图
- 3.3.2 程序设计
- 3.4 温度测量报警系统的实习成果
- 3.4.1 仿真结果
- 3.4.2 实物结果
- 四、总结
- 实验参考资料(gitee)
前言
该系统通过使用keil5和Proteus软件,最终在硬件上实现一个温度检测报警的小项目(只使用Proteus进行模拟仿真也是可以实现的)
提示:以下是本篇文章正文内容,下面案例可供参考
一、实习目的
1、 掌握51单片机应用编程及调试;
2、 掌握Proteus电路图设计与仿真;
3、 掌握数字温度传感器DS18B20的使用;
4、 掌握单总线协议的基本特点及通信过程,并掌握单片机IO端口模拟单总线时序控制程序;
5、 培养综合运用知识的能力和工程设计的能力。
二、实习任务
2.1 设计温度测量报警系统硬件电路
(1) 进行元器件正确选型;
(2) 在proteus中完成各模块电路和系统电路的设计;
(3) 在Proteus中进行电路仿真与测试;
2.2 温度测量报警系统软件编程、仿真与调试;
(1) 基于Keil完成温度计测量、显示、报警和上下限设定等功能的实现;
(2) 进行软件仿真与调试;
2.3 完成温度测量报警系统的实物制作与调试;
(1)进行温度计的实物焊接;
(2)实际测试,并最终调试完成作品。
三、 实习内容及实习成果
3.1 温度测量报警系统的功能要求
单片机通过实时检测温度传感器DS18B20芯片的状态,并将DS18B20芯片得到的数据进行处理。上电之后数码管显示当前的环境温度,并且蜂鸣器响一下,提示开机。S1作为复位按键,S2和S3作为温度调整按键,S4作为模式选择按键,按下之后可以选择调整温度上限H或者下限L,第三次按下时,数码管恢复显示实时温度。当检测到的温度高于或者低于设置的报警值的时候,蜂鸣器报警同时报警灯闪烁,温度检测精确到0.1度。数据保存在单片机内部EEPOM中。
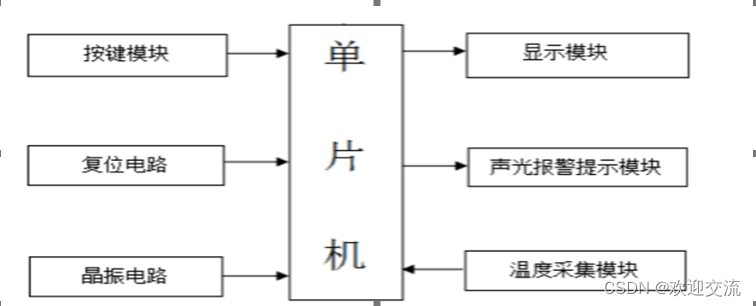
3.2 温度测量报警系统的设计方法
首先对于以下六个模块进行proteus硬件设计。在硬件原理图完成之后,按照模块进行软件设计。软件设计之后,将程序加载到proteus中进行模拟仿真,测试程序是否能够正常实现所预期功能。实现预期功能之后,就可以进行实物焊接,最后将程序烧录进实物中,再次进行调试。最终达到预期目标。
3.3 温度测量报警系统的设计过程
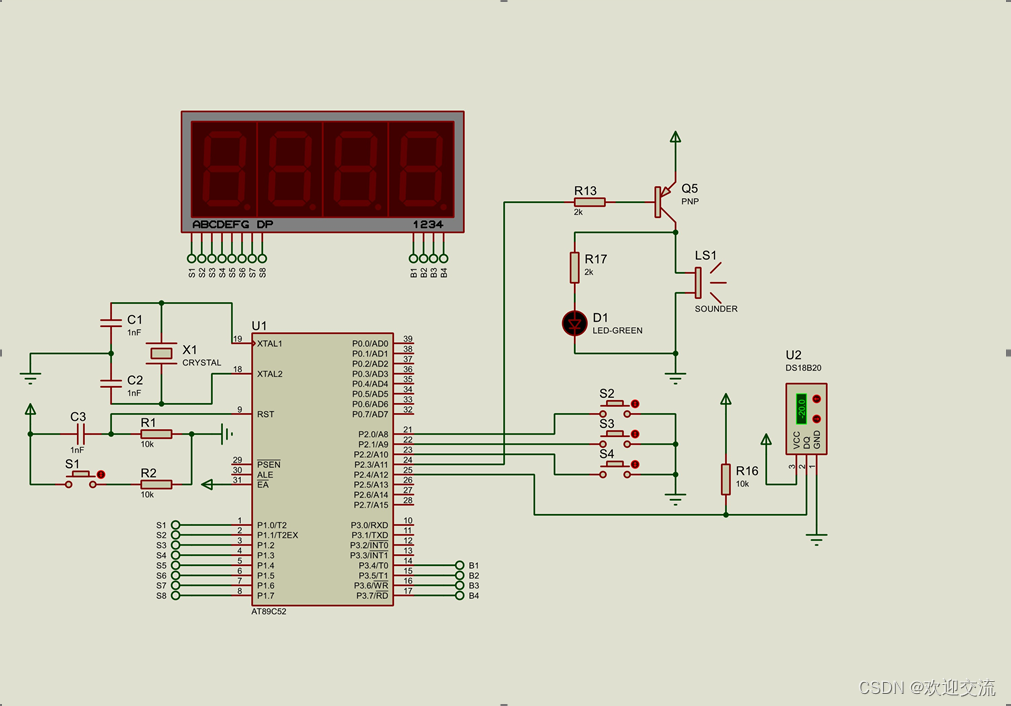
3.3.1 proteus仿真原理图
3.3.2 程序设计
#include <REGX52.h> //调用单片机头文件
#define uint unsigned int
typedef unsigned char uchar;
uint Sign_Negative = 0; //默认为正数//数码管段选定义 0 1 2 3 4 5 6 7 8 9 H L
uchar code smg_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x89,0xC7}; //段码//数码管位选定义
uchar code smg_we[]={0x10,0x20,0x40,0x80};
uchar dis_smg[4] = {0}; sbit DQ = P2^4; //18b20 IO口的定义
sbit beep = P2^3; //蜂鸣器IO口定义uint temperature ; //
bit flag_300ms=1 ;
uchar menu_1; //菜单设计的变量
uint t_high = 450,t_low = 150; //温度上下限报警值 /***********************1ms延时函数*****************************/
void delay_1ms(uint q)
{uint i,j;for(i=0;i<q;i++)for(j=0;j<120;j++);
}/***********************小延时函数*****************************/
void delay_uint(uint q)
{while(q--);
}/***********************数码显示函数*****************************/
void display()
{static uchar i; i++;if(i >= 4)i = 0; P1 = 0xff; //消隐 P3 = smg_we[i]; //位选P1 = dis_smg[i]; //段选
}/***********************18b20初始化函数*****************************/
void init_18b20()
{bit q;DQ = 1; //把总线拿高delay_uint(1); DQ = 0; //给复位脉冲delay_uint(80); DQ = 1; //把总线拿高 等待delay_uint(10); q = DQ; //读取18b20初始化信号delay_uint(20); DQ = 1; //把总线拿高 释放总线
}/*************写18b20内的数据***************/
void write_18b20(uchar dat)
{uchar i;for(i=0;i<8;i++){ //写数据是低位开始DQ = 0; //把总线拿低写时间隙开始 DQ = dat & 0x01; //向18b20总线写数据了delay_uint(5); DQ = 1; //释放总线dat >>= 1;}
}/*************读取18b20内的数据***************/
uchar read_18b20()
{uchar i,value;for(i=0;i<8;i++){DQ = 0; //把总线拿低读时间隙开始 value >>= 1; //读数据是低位开始DQ = 1; //释放总线if(DQ == 1) //开始读写数据 value |= 0x80;delay_uint(5); }return value; //返回数据
}/*************读取温度的值 读出来的是小数***************/
uint read_temp()
{uint wendu = 0;uchar low = 0;uchar high = 0;init_18b20();write_18b20(0xcc); //跳过64位ROMwrite_18b20(0x44); //启动一次温度转换命令delay_uint(50);init_18b20(); //初始化18b20write_18b20(0xcc); //跳过64位ROMwrite_18b20(0xbe); //发出读取暂存器命令low = read_18b20();high = read_18b20();wendu = high;wendu <<= 8;wendu |= low;if(wendu & 2048){Sign_Negative = 1;wendu = ~wendu + 1;} else {Sign_Negative = 0;}wendu = wendu * 0.0625;wendu = wendu*10 + 0.5;return wendu; //返回读出的温度 带小数
}/*************定时器0初始化程序***************/
void time_init()
{EA = 1; //开总中断TMOD = 0X01; //定时器0、定时器1工作方式1ET0 = 1; //开定时器0中断 TR0 = 1; //允许定时器0定时
}/********************独立按键程序*****************/
uchar key_can; //按键值void key() //独立按键程序
{key_can = 0; //按键值还原if((P2 & 0x07) != 0x07) //按键按下{delay_1ms(10); //按键消抖动if((P2 & 0x07) != 0x07){ //确认是按键按下switch(P2 & 0x07){case 0x06: key_can = 3; break; //得到k3键值case 0x05: key_can = 2; break; //得到k2键值case 0x03: key_can = 1; break; //得到k1键值}} while ((P2 & 0x07)!= 0X07); //松手检测 }
}/****************按键处理数码管显示函数***************/
void key_with()
{if(key_can == 1) //设置键{menu_1 ++;if(menu_1 >= 3){menu_1 = 0;}}if(menu_1 == 1) //设置高温报警{if(key_can == 2){t_high ++ ; //温度上限值加1if(t_high > 990)t_high = 990;}if(key_can == 3){t_high -- ; //温度上限值减1if(t_high <= t_low)t_high = t_low + 1;}dis_smg[3] = smg_du[t_high % 10]; //取小数显示dis_smg[2] = smg_du[t_high / 10 % 10]; //取个位显示dis_smg[2] &= 0x7f;dis_smg[1] = smg_du[t_high / 100 % 10] ; //取十位显示dis_smg[0] = smg_du[10]; //H} if(menu_1 == 2) //设置低温报警{if(key_can == 2){t_low ++ ; //温度下限值加1if(t_low >= t_high)t_low = t_high - 1;}if(key_can == 3){t_low -- ; //温度下限值减1if(t_low <= 1)t_low = 1;}dis_smg[3] = smg_du[t_low % 10]; //取小数显示dis_smg[2] = smg_du[t_low / 10 % 10]; //取个位显示dis_smg[2] &= 0x7f;dis_smg[1] = smg_du[t_low / 100 % 10]; //取十位显示dis_smg[0] = smg_du[11]; //L} delay_1ms(150);
} /****************报警函数***************/
void clock_h_l()
{if((temperature <= t_low) || (temperature >= t_high)){beep = !beep; //蜂鸣器报警 }else{beep = 1; }
}sbit P27 = P2^7;//测试探针/****************主函数***************/
void main()
{beep = 0; //开机叫一声 delay_1ms(150);beep = 1; // 响完停止,判断温度在决定是否响P0 = P1 = P2 = P3 = 0xff;time_init(); //初始化定时器 while(1){ key(); //按键程序if(key_can != 0){key_with(); //设置报警温度 }if(flag_300ms == 1) //300ms 处理一次温度程序{ flag_300ms = 0; temperature = read_temp(); //先读出温度的值clock_h_l(); //报警函数if(menu_1 == 0){ dis_smg[3] = smg_du[temperature % 10]; //取温度的小数显示dis_smg[2] = smg_du[temperature / 10 % 10]; //取温度的个位显示dis_smg[2] &= 0x7f;//显示小数点 dis_smg[0] = dis_smg[1] = 0xFF;if (temperature >= 100 && temperature < 1000)//当温度处于>=10 && <100 {dis_smg[1] = smg_du[temperature / 100 % 10]; //取温度的十位显示 if (Sign_Negative) {//如果是负数就加负号dis_smg[0] = 0xBF;} } else {//当fabs(温度) 小于10if (Sign_Negative) {//如果是负数就加负号dis_smg[1] = 0xBF;} } }} }
}/*************定时器0中断服务程序***************/
void time0_int() interrupt 1
{ static uchar value; //定时2ms中断一次TH0 = 0xf8;TL0 = 0x30; //2msdisplay(); //数码管显示函数value++; if(value >= 150){value = 0; flag_300ms = 1;}
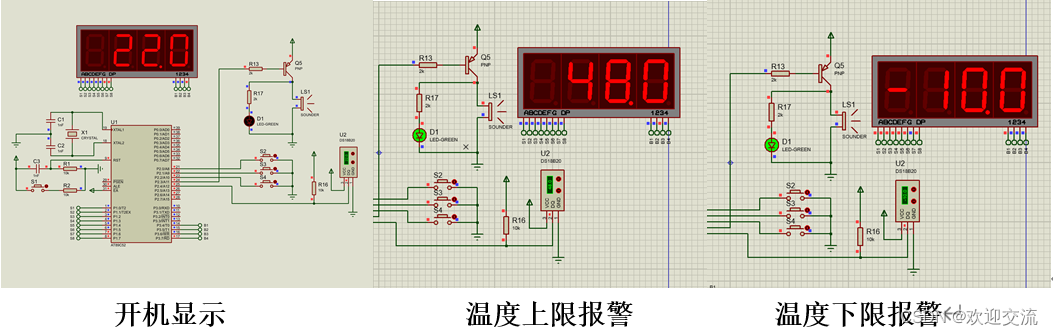
}3.4 温度测量报警系统的实习成果
3.4.1 仿真结果
3.4.2 实物结果

四、总结
本次实验遇到三个问题。第一个问题:数码管不能正确显示数字。最后发现,是码表与数码管不匹配造成的。在我完修改码表之后,问题得到解决。第二个问题:在于温度转换的计算。我一直算出来的值,与标准值0.0625差距很大。最后通过老师的讲解,发现自己进制没有转换对,导致自己算出来的值不对。第三问题:当我按下按键之后,温度调整太快。最后我通过给按键处理数码管显示函数加入松手检测程序,从而解决了这个问题。设计的不足之处:按一下每次只能加减0.1的数值。设置的温差如果小,按下的次数还比较轻松。倘若要调节10度,那就要按下100次。这个着实让人头疼。因此,我又给它加入了一个延时函数。倘若按下的时间超过2ms,那么设置的温度上限,就会快速增加。减也是如此。我思考之后,发现非常的合理,最后通过修改代码,成功完成这个按键模块的优化。
实验参考资料(gitee)
程序和代码: https://gitee.com/shiguangliushui/Temperature-measurement-alarm-system.git