目录
1.1 DynaSLAM和ORB-SLAM2文件对比
1.2 RGBD模式运行流程
论文翻译地址:动态SLAM论文(2) — DynaSLAM: Tracking, Mapping and Inpainting in Dynamic Scenes_几度春风里的博客-CSDN博客
1.1 DynaSLAM和ORB-SLAM2文件对比
DynaSLAM是一个建立在ORB-SLAM2基础上的视觉SLAM系统,它增加了动态物体检测和背景修复的能力。DynaSLAM在单目、立体和RGB-D配置下对动态场景非常稳健。能够通过多视角几何、深度学习或两者结合来检测移动物体。拥有场景的静态地图允许修复被这些动态物体遮挡的帧背景。
ORB-SLAM2和DynaSLAM的文件对比如下,红色为DynaSLAM相对于ORB-SLAM2多出的文件。
| 文件目录 | 文件 | 功能 |
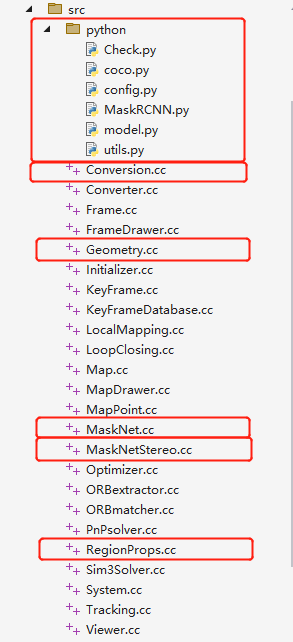 | python | Mask-RCNN目标检测文件 |
| Conversion.cc | 包含一些数据类型之间的转换函数,用于在不同类型之间进行数据转换 | |
| Converter.cc | 包含将动态点云数据转换为Dynaslam数据格式的函数 | |
| Frame.cc | 用于表示相机的一帧图像,其中包含了图像的各种属性和特征点 | |
| FrameDrawer.cc | 用于在图像上绘制特征点、相机轨迹等信息 | |
| Geometry.cc | 包含一些几何计算的函数,例如计算两条线段的交点等 | |
| Initializer.cc | 用于初始化相机的位置和姿态 | |
| KeyFramer.cc | 用于管理关键帧的生成和选取 | |
| KeyFrameDatabase.cc | 用于管理关键帧的数据库,用于地图匹配和回环检测 | |
| LocalMapping.cc | 用于局部地图建立和更新 | |
| loopClosing.cc | 用于检测并闭合回环 | |
| Map.cc | 用于管理地图的点云和关键帧 | |
| MapPoint.cc | 用于表示地图中的点云 | |
| MaskNet.cc | 用于进行目标检测和语义分割 | |
| MaskNetStereo.cc | 用于进行立体目标检测和语义分割 | |
| Optimizer.cc | 用于对地图中的点云进行优化 | |
| ORBextractor.cc | 用于提取图像的ORB特征点 | |
| ORBmatcher.cc | 用于进行ORB特征点的匹配 | |
| PnPsolver.cc | 用于求解相机的位置和姿态 | |
| RegionProps.cc | 用于提取图像中的目标区域 | |
| Sim3Solver.cc | 于求解相机的相似变换矩阵 | |
| System.cc | 是整个系统的入口,包含了主要的函数和流程 | |
| Tracking.cc | 用于跟踪相机的运动和定位 | |
| Viewer.cc | 用于可视化显示地图和相机的运动轨迹 |
1.2 RGBD模式运行流程
笔记将以RGBD模式运行为基础,讲解整个DynaSLAM的运行流程,RGBD模式的运行在 /Example/RGB-D/rgbd_tum.cc文件下。
检查和加载相关的配置文件,首先判断传入的参数数是否符合要求,然后进行变量的声明用于存放彩色图像、深度图像的路径,以及对应的时间戳的变量。
int main(int argc, char **argv)
{// 判断传入的参数数是否符合要求if(argc != 5 && argc != 6 && argc != 7){cerr << endl << "Usage: ./rgbd_tum path_to_vocabulary path_to_settings path_to_sequence path_to_association (path_to_masks) (path_to_output)" << endl;return 1;}// Retrieve paths to images//按顺序存放需要读取的彩色图像、深度图像的路径,以及对应的时间戳的变量vector<string> vstrImageFilenamesRGB;vector<string> vstrImageFilenamesD;vector<double> vTimestamps;...
}然后加载关联文件,从文件中加载rgb图像路径、时间戳、深度图像路径。
/** 从关联文件中提取这些需要加载的图像的路径和时间戳
*/
void LoadImages(const string &strAssociationFilename, vector<string> &vstrImageFilenamesRGB,vector<string> &vstrImageFilenamesD, vector<double> &vTimestamps)
{//输入文件流ifstream fAssociation;//打开关联文件fAssociation.open(strAssociationFilename.c_str());//一直读取,直到文件结束while(!fAssociation.eof()){string s;//读取一行的内容到字符串s中getline(fAssociation,s);//如果不是空行就可以分析数据了if(!s.empty()){stringstream ss;ss << s;//字符串格式: 时间戳rgb图像路径 时间戳 深度图像路径double t;string sRGB, sD;ss >> t;vTimestamps.push_back(t);ss >> sRGB;vstrImageFilenamesRGB.push_back(sRGB);ss >> t;ss >> sD;vstrImageFilenamesD.push_back(sD);}}
}随后开始初始化MaskRCNN网络和ORB-SLAM2系统
// Initialize Mask R-CNN// 初始化Mask R-CNNDynaSLAM::SegmentDynObject *MaskNet;if (argc==6 || argc==7){cout << "Loading Mask R-CNN. This could take a while..." << endl;MaskNet = new DynaSLAM::SegmentDynObject();cout << "Mask R-CNN loaded!" << endl;}//初始化ORB-SLAM2系统ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);与ORB-SLAM2的不同:因为有关于图像分割的操作,因此在设置了图像膨胀的相关参数,后面也创建了相关的的文件路径用于TrackRGB中的输出imRGBOut,imDOut,maskOut。
// Dilation settings// 设置图像膨胀(dilation)的参数,并创建一个膨胀操作的核(kernel)int dilation_size = 15; // 膨胀的大小为15// 使用getStructuringElement函数创建了一个膨胀操作的核cv::Mat kernel = getStructuringElement(cv::MORPH_ELLIPSE, //表示椭圆形cv::Size( 2*dilation_size + 1, 2*dilation_size+1 ), //表示核的大小cv::Point( dilation_size, dilation_size ) ); //表示核的锚点位置// 创建一系列的文件目录用于存放rgb、depth和maskif (argc==7){std::string dir = string(argv[6]);mkdir(dir.c_str(), S_IRWXU | S_IRWXG | S_IROTH | S_IXOTH);dir = string(argv[6]) + "/rgb/";mkdir(dir.c_str(), S_IRWXU | S_IRWXG | S_IROTH | S_IXOTH);dir = string(argv[6]) + "/depth/";mkdir(dir.c_str(), S_IRWXU | S_IRWXG | S_IROTH | S_IXOTH);dir = string(argv[6]) + "/mask/";mkdir(dir.c_str(), S_IRWXU | S_IRWXG | S_IROTH | S_IXOTH);}随后开始正式的处理,对图像序列中的每张图像展开遍历,首先从文件中读取RGB、depth和时间戳并检查图像的合法性;随后开始进行图像分割,对分割的结果利用膨胀操作;最后根据不同的参数利用不同的TrackRGBD函数开启跟踪线程,并将跟踪线程输出的结果imRGBOut,imDOut, maskOut 保存到创建的文件路径中。
//对图像序列中的每张图像展开遍历for(int ni=0; ni<nImages; ni++){// Read image and depthmap from file// 从文件中读取RGB、depth和时间戳imRGB = cv::imread(string(argv[3])+"/"+vstrImageFilenamesRGB[ni],CV_LOAD_IMAGE_UNCHANGED);imD = cv::imread(string(argv[3])+"/"+vstrImageFilenamesD[ni],CV_LOAD_IMAGE_UNCHANGED);double tframe = vTimestamps[ni];// 检查图像的合法性if(imRGB.empty()){cerr << endl << "Failed to load image at: "<< string(argv[3]) << "/" << vstrImageFilenamesRGB[ni] << endl;return 1;}#ifdef COMPILEDWITHC11std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#elsestd::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif// Segment out the images// 开始进行图像分割cv::Mat mask = cv::Mat::ones(480,640,CV_8U);if (argc == 6 || argc == 7){cv::Mat maskRCNN;// 利用GetSegmentation()函数进行图像分割maskRCNN = MaskNet->GetSegmentation(imRGB,string(argv[5]),vstrImageFilenamesRGB[ni].replace(0,4,""));// 将分割的结果 maskRCNN 复制到 maskRCNNdilcv::Mat maskRCNNdil = maskRCNN.clone();// 对 maskRCNN 应用膨胀操作,使用 kernel 作为内核cv::dilate(maskRCNN,maskRCNNdil, kernel);// 将 maskRCNNdil 从 mask 中减去,得到最终的mask结果mask = mask - maskRCNNdil;}// Pass the image to the SLAM system// 根据不同的参数利用不同的TrackRGBD函数开启跟踪线程if (argc == 7){SLAM.TrackRGBD(imRGB,imD,mask,tframe,imRGBOut,imDOut,maskOut);}else {SLAM.TrackRGBD(imRGB,imD,mask,tframe);}#ifdef COMPILEDWITHC11std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#elsestd::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif// 将跟踪线程输出的结果imRGBOut,imDOut,maskOut保存到创建的文件路径中if (argc == 7){cv::imwrite(string(argv[6]) + "/rgb/" + vstrImageFilenamesRGB[ni],imRGBOut);vstrImageFilenamesD[ni].replace(0,6,"");cv::imwrite(string(argv[6]) + "/depth/" + vstrImageFilenamesD[ni],imDOut);cv::imwrite(string(argv[6]) + "/mask/" + vstrImageFilenamesRGB[ni],maskOut);}最后等待所有的图像处理完成后终止SLAM过程,统计分析追踪耗时和保存最终的相机轨迹。
// Stop all threads//终止SLAM过程SLAM.Shutdown();// Tracking time statistics//统计分析追踪耗时sort(vTimesTrack.begin(),vTimesTrack.end());float totaltime = 0;for(int ni=0; ni<nImages; ni++){totaltime+=vTimesTrack[ni];}cout << "-------" << endl << endl;cout << "median tracking time: " << vTimesTrack[nImages/2] << endl;cout << "mean tracking time: " << totaltime/nImages << endl;// Save camera trajectory//保存最终的相机轨迹SLAM.SaveTrajectoryTUM("CameraTrajectory.txt");SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");