原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
- 1、readobsnav():Rinex 文件读取主入口函数
- 2、readrnxfile():传入文件路径,读取起止时间内数据
- 4、readrnxfp():传入文件描述符,调用对应的读取函数
- 5、readrnxh():读取文件头
- 6、观测文件读取
- 1. decode_obsh():解析观测数据文件头
- 2. readrnxobs():读取o文件中全部观测值数据
- 3. readrnxobsb():读取一个观测历元的观测数据
- 4. decode_obsepoch():解码历元首行数据
- 5. decode_obsdata():读取一个历元内一颗卫星的观测值
- 7、星历文件读取
- 1. decode_navh()、decode_gnavh()、decode_hnavh()
- 2. readrnxnav():读取星历文件,添加到nav结构体中
- 3. readrnxnavb():读取一个历元的星历数据,添加到 eph 结构体中
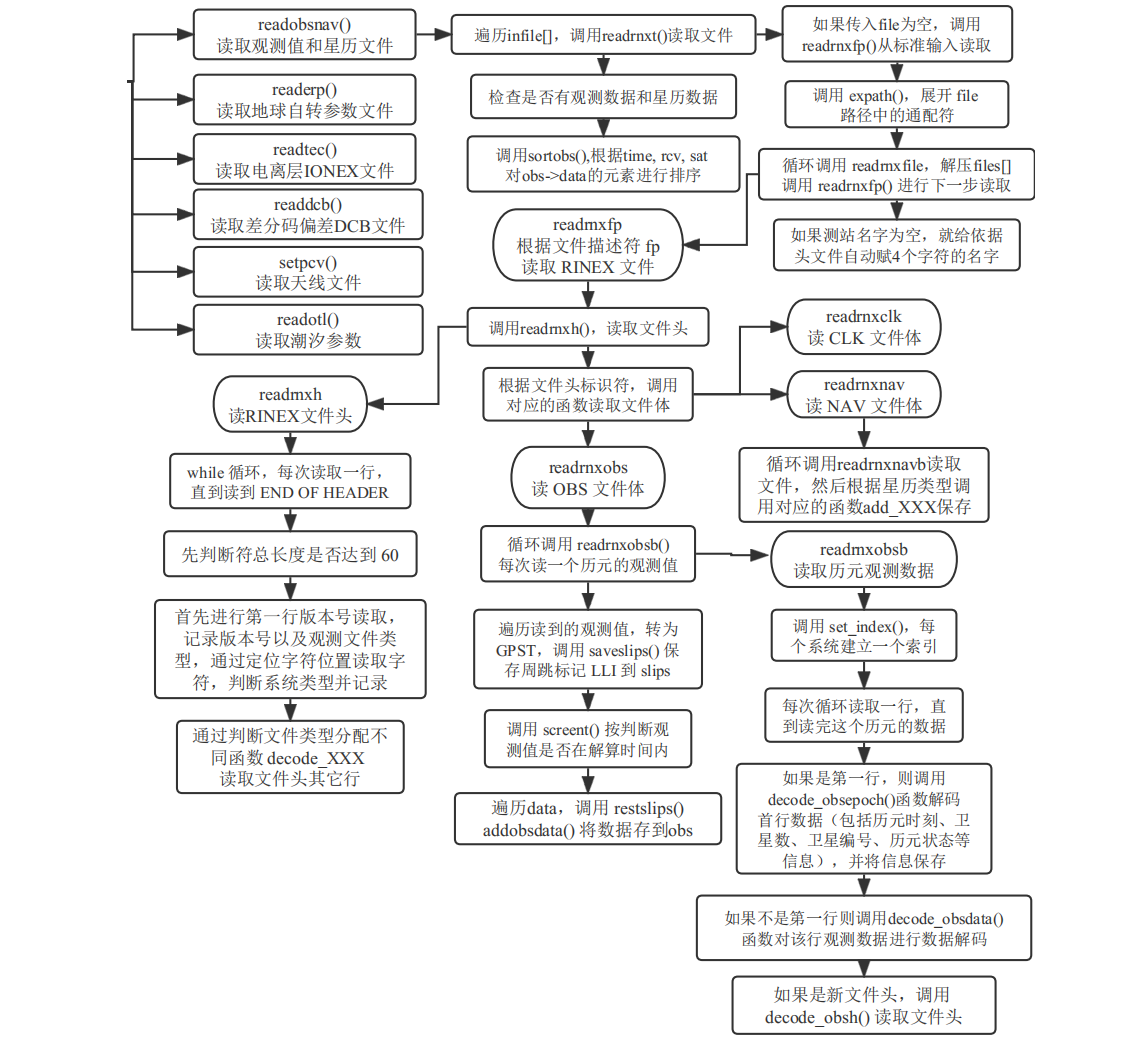
GAMP 的文件读取与 RTKLIB 大致相同,只做了一点点增强:
1、readobsnav():Rinex 文件读取主入口函数
gtime_t ts 解算开始时间
gtime_t te 解算结束时间
double ti 解算时间间隔
char **infile 传入文件路径数组
const int *index 对应文件下标
int n infile[]元素个数
const prcopt_t *prcopt 处理选项
obs_t *obs 存观测数据OBS
nav_t *nav 存导航电文数据NAV
sta_t *sta 测站结构体,存obs文件头读取到的一部分的信息
index[]的作用:会传给
execses_b(),再传给execses_r(),再传给execses(),再传给readobsnav()。如果不需要根据tu分时间段解算,index存的就是 0~n,如果需要分时间段解算,index存的是对应时间段内文件的下标。
-
先初始化
obs、nav->eph、nav->geph;遍历infile[],如果下标和上一次循环的不同,记录当前index[i]值到ind。调用readrnxt()读取文件,其先调用readrnxfile()读取文件,如果测站名字为空,就给依据头文件自动赋 4 个字符的名字。 -
然后判断是否有观测数据和星历数据,成功读取到数据,就调用
sortobs(),根据 time、rcv、sat ,对obs->data的元素进行排序、去重,得到历元数nepoch。 -
最后调用
uniqnav(),其通过调用uniqeph()、uniqgeph()进行星历数据的排序去重,通过调用satwavelen()获取所有载波相位的波长到nav->lam。
static int readobsnav(gtime_t ts, gtime_t te, double ti, char *infile[MAXINFILE],const int *index, int n, const prcopt_t *prcopt,obs_t *obs, nav_t *nav, sta_t *sta)
{int i,j,ind=0,nobs=0,rcv=1,nep;// 初始化 obs、nav->eph、nav->gephobs->data=NULL; obs->n =obs->nmax =0;nav->eph =NULL; nav->n =nav->nmax =0;nav->geph=NULL; nav->ng=nav->ngmax=0;PPP_Glo.nEpoch=0;// 遍历 infile[],调用readrnxt()读取文件for (i=0;i<n;i++) {// 如果下标和上一次循环的不同,记录当前index[i]值到indif (index[i]!=ind) {if (obs->n>nobs) rcv++;ind=index[i]; nobs=obs->n; }/* read rinex obs and nav file */nep=readrnxt(infile[i],rcv,ts,te,ti,prcopt->rnxopt,obs,nav,rcv<=2?sta+rcv-1:NULL);}// 判断是否有观测数据和星历数据if (obs->n<=0) {printf("*** ERROR: no obs data!\n");return 0;}if (nav->n<=0&&nav->ng<=0) {printf("*** ERROR: no nav data!\n");return 0;}// 调用sortobs(),根据 time、rcv、sat ,对 obs->data 的元素进行排序、去重,得到历元数nepoch/* sort observation data */PPP_Glo.nEpoch=sortobs(obs);// 最后调用uniqnav(),其通过调用 uniqeph()、uniqgeph() 进行星历数据的排序去重,// 通过调用 satwavelen() 获取所有载波相位的波长到 nav->lam。/* delete duplicated ephemeris */uniqnav(nav);/* set time span for progress display */if (ts.time==0||te.time==0) {for (i=0; i<obs->n;i++) if (obs->data[i].rcv==1) break;for (j=obs->n-1;j>=0;j--) if (obs->data[j].rcv==1) break;if (i<j) {if (ts.time==0) ts=obs->data[i].time;if (te.time==0) te=obs->data[j].time;settspan(ts,te);}}// 判断有无 GLONASS 星历,为啥不放在前面???if (prcopt->navsys&SYS_GLO) {if (nav->ng<=0) {printf("*** ERROR: nav->ng<=0!\n");}}return 1;
}
extern int readrnxt(const char *file, int rcv, gtime_t ts, gtime_t te,double tint, const char *opt, obs_t *obs, nav_t *nav,sta_t *sta)
{int i,stat=0;const char *p;char type=' ',*files[MAXEXFILE]={0};/*if (!*file) {return readrnxfp(stdin,ts,te,tint,opt,0,1,&type,obs,nav,sta);}for (i=0;i<MAXEXFILE;i++) {if (!(files[i]=(char *)malloc(1024))) {for (i--;i>=0;i--) free(files[i]);return -1;}}*//* expand wild-card *//*if ((n=expath(file,files,MAXEXFILE))<=0) {for (i=0;i<MAXEXFILE;i++) free(files[i]);return 0;}*//* read rinex files *///for (i=0;i<n&&stat>=0;i++) {// 调用 readrnxfile() 读取文件stat=readrnxfile(file,ts,te,tint,opt,0,rcv,&type,obs,nav,sta);//}// 如果测站名字为空,就给依据头文件自动赋 4 个字符的名字/* if station name empty, set 4-char name from file head */if (type=='O'&&sta) {if (!(p=strrchr(file,FILEPATHSEP))) p=file-1;if (!*sta->name) setstr(sta->name,p+1,4);}for (i=0;i<MAXEXFILE;i++) free(files[i]);return stat;
}
2、readrnxfile():传入文件路径,读取起止时间内数据
-
如果传入了测站信息结构体 sta,调用
init_sta()初始化,值赋 0,指针赋空。 -
根据文件名判断文件来源(COD、IGS、IGR、GFZ、ESA、IAC、其它),以此设置 index。
-
以读的方式打开解压后的文件,调用
readrnxfp(),从文件描述符 fp 中读取文件,读完之后,关闭打开的文件描述符fp。
static int readrnxfile(const char *file, gtime_t ts, gtime_t te, double tint,const char *opt, int flag, int index, char *type,obs_t *obs, nav_t *nav, sta_t *sta)
{FILE *fp;int stat;//char tmpfile[1024];// 如果传入了测站信息结构体 sta,调用 init_sta() 初始化if (sta) init_sta(sta);// 判断文件名长度是否合理if ( strlen(file)<2 ) return ' ';// 以读的方式打开解压后的文件if (!(fp=fopen(file,"r"))) {return ' ';}// 根据文件名判断文件来源(COD、IGS、IGR、GFZ、ESA、IAC、其它),以此设置 index。if (strstr(file,"cod")||strstr(file,"COD")) index=10;else if (strstr(file,"igs")||strstr(file,"IGS")) index=9;else if (strstr(file,"igr")||strstr(file,"IGR")) index=8;else if (strstr(file,"gfz")||strstr(file,"GFZ")) index=7;else if (strstr(file,"esa")||strstr(file,"ESA")) index=6;else if (strstr(file,"iac")||strstr(file,"IAC")) index=-1;else index=0;// 调用 readrnxfp() ,从文件描述符 fp 中读取文件/* read rinex file */stat=readrnxfp(fp,ts,te,tint,opt,flag,index,type,obs,nav,sta);// 读完之后,关闭打开的文件描述符 fpfclose(fp);/* delete temporary file *///if (cstat) remove(tmpfile);return stat;
}
4、readrnxfp():传入文件描述符,调用对应的读取函数
- 调用
readrnxh()读取头文件。并获取文件类型type。 - 根据
type调用对应的函数进行分类读取,readrnxobs()读观测文件,readrnxnav()读星历文件,调用readrnxnav()读钟差文件。
static int readrnxfp(FILE *fp, gtime_t ts, gtime_t te, double tint,const char *opt, int flag, int index, char *type,obs_t *obs, nav_t *nav, sta_t *sta)
{double ver;int sys,tsys;char tobs[NUMSYS][MAXOBSTYPE][4]={{""}};// 调用 readrnxh() 读取头文件。并获取文件类型 type/* read rinex header */if (!readrnxh(fp,&ver,type,&sys,&tsys,tobs,nav,sta)) return 0;// flag 置 0 就不读钟差/* flag=0:except for clock,1:clock */if ((!flag&&*type=='C')||(flag&&*type!='C')) return 0;// 根据 type 调用对应的函数进行分类读取/* read rinex body */switch (*type) {case 'O': return readrnxobs(fp,ts,te,tint,opt,index,ver,tsys,tobs,obs);case 'N': return readrnxnav(fp,opt,ver,sys ,nav);case 'G': return readrnxnav(fp,opt,ver,SYS_GLO,nav);case 'J': return readrnxnav(fp,opt,ver,SYS_QZS,nav); /* extension */case 'L': return readrnxnav(fp,opt,ver,SYS_GAL,nav); /* extension */case 'C': return readrnxclk(fp,opt,index,nav);}return 0;
}
5、readrnxh():读取文件头
- 函数的主体在一个 while 大循环中,循环读取每一行,直到出现 “END OF HEADER”
- 首先进行第一行版本号读取,记录版本号、卫星系统以及观测文件类型。
- PGM / RUN BY / DATE 跳过不读。
- 比 RTKLIB 多了 WIDELANE SATELLITE FRACTIONAL BIASES 读取。
- 其它类型的行,根据文件类型,调用
decode_obsh()、decode_navh()、decode_gnavh()、decode_hnavh()、decode_navh()读取。

static int readrnxh(FILE *fp, double *ver, char *type, int *sys, int *tsys,char tobs[][MAXOBSTYPE][4], nav_t *nav, sta_t *sta)
{double bias;char buff[MAXRNXLEN],*label=buff+60;int i=0,block=0,sat;*ver=2.10; *type=' '; *sys=SYS_GPS; *tsys=TSYS_GPS;// while 循环,每次读取一行,直到读到 END OF HEADERwhile (fgets(buff,MAXRNXLEN,fp)) {// 判定观测文件头部分所有字符总长度是否正常if (strlen(buff)<=60) continue;// 首先进行第一行版本号读取,记录版本号以及观测文件类型else if (strstr(label,"RINEX VERSION / TYPE")) {*ver=str2num(buff,0,9);*type=*(buff+20);// 通过定位字符位置读取字符,判断系统类型并记录/* satellite system */switch (*(buff+40)) {case ' ':case 'G': *sys=SYS_GPS; *tsys=TSYS_GPS; break;case 'R': *sys=SYS_GLO; *tsys=TSYS_UTC; break;case 'E': *sys=SYS_GAL; *tsys=TSYS_GAL; break; /* v.2.12 */case 'J': *sys=SYS_QZS; *tsys=TSYS_QZS; break; /* v.3.02 */case 'C': *sys=SYS_CMP; *tsys=TSYS_CMP; break; /* v.2.12 */case 'M': *sys=SYS_NONE; *tsys=TSYS_GPS; break; /* mixed */default :printf("not supported satellite system: %c\n",*(buff+40));break;}continue;}else if (strstr(label,"PGM / RUN BY / DATE")) continue;else if (strstr(label,"COMMENT")) { /* opt */// 比 RTKLIB 多了 WIDELANE SATELLITE FRACTIONAL BIASES 读取/* read cnes wl satellite fractional bias */if (strstr(buff,"WIDELANE SATELLITE FRACTIONAL BIASES")||strstr(buff,"WIDELANE SATELLITE FRACTIONNAL BIASES")) {block=1;}else if (block) {/* cnes/cls grg clock */if (!strncmp(buff,"WL",2)&&(sat=satid2no(buff+3))&&sscanf(buff+40,"%lf",&bias)==1) {nav->wlbias[sat-1]=bias;}/* cnes ppp-wizard clock */else if ((sat=satid2no(buff+1))&&sscanf(buff+6,"%lf",&bias)==1) {nav->wlbias[sat-1]=bias;}}continue; }// 通过判断文件类型分配不同函数读取文件头/* file type */switch (*type) {case 'O': decode_obsh(fp,buff,*ver,tsys,tobs,nav,sta); break;case 'N': decode_navh (buff,nav); break;case 'G': decode_gnavh(buff,nav); break;case 'J': decode_navh (buff,nav); break; /* extension */case 'L': decode_navh (buff,nav); break; /* extension */}if (strstr(label,"END OF HEADER")) return 1;if (++i>=MAXPOSHEAD&&*type==' ') break; /* no rinex file */}return 0;
}
6、观测文件读取
1. decode_obsh():解析观测数据文件头
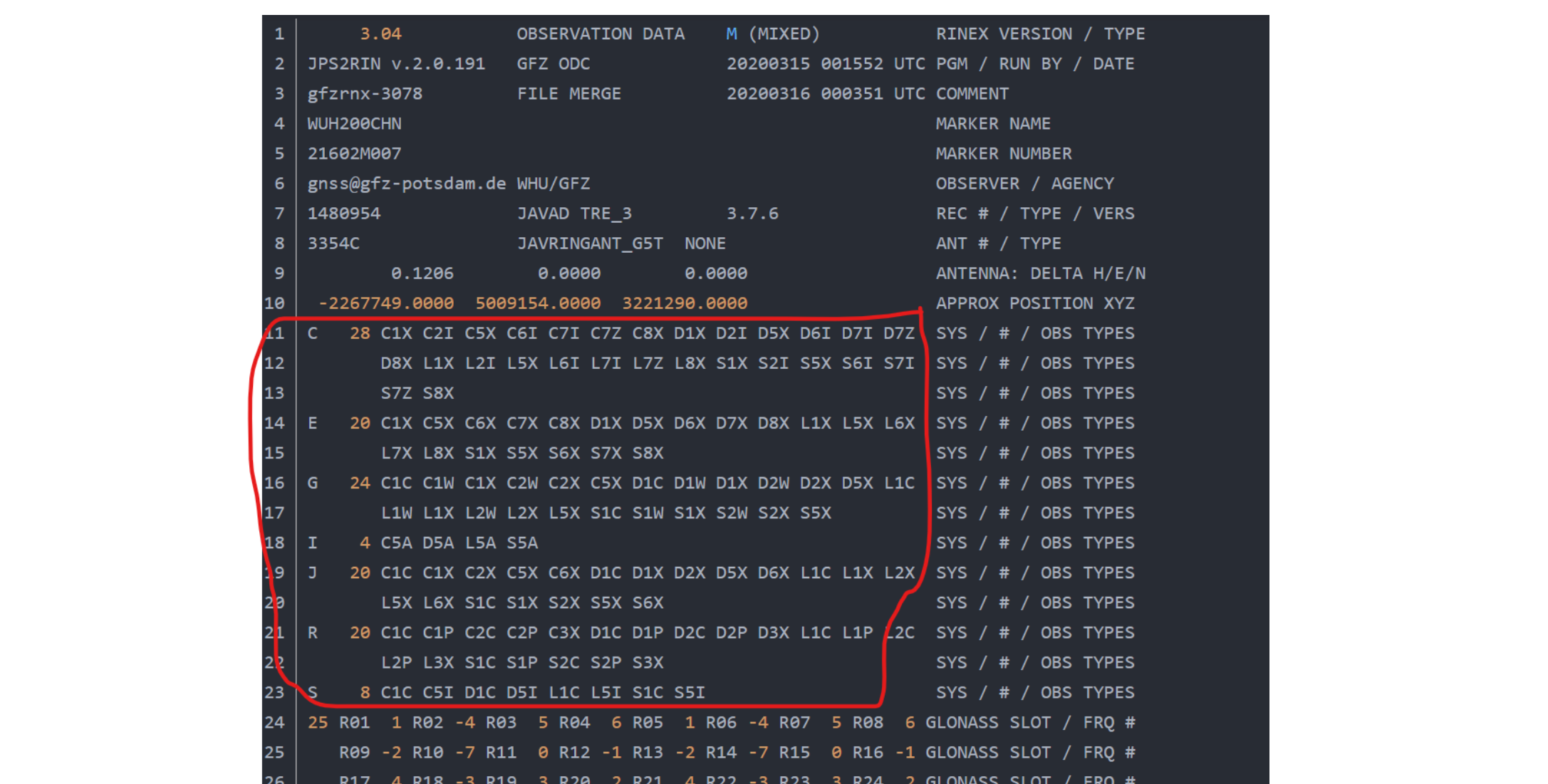
最关键的是解析观测值类型如下图,存到 tobs 三维数组中,【星座类型】【观测类型】【字符串数】,后面读文件体的时候要按文件头的观测值类型来读。
static void decode_obsh(FILE *fp, char *buff, double ver, int *tsys,char tobs[][MAXOBSTYPE][4], nav_t *nav, sta_t *sta)
{/* default codes for unknown code */const char *defcodes[]={"CWX ", /* GPS: L125___ */"CC ", /* GLO: L12____ */"X XXXX", /* GAL: L1_5678 */"CXXX ", /* QZS: L1256__ */"C X ", /* SBS: L1_5___ */"X XX " /* BDS: L1__67_ */};double del[3];int i,j,k,n,nt,prn,fcn;const char *p;char *label=buff+60,str[4];if (strstr(label,"MARKER NAME" )) {if (sta) setstr(sta->name,buff,60);}else if (strstr(label,"MARKER NUMBER" )) { /* opt */if (sta) setstr(sta->marker,buff,20);}else if (strstr(label,"MARKER TYPE" )) ; /* ver.3 */else if (strstr(label,"OBSERVER / AGENCY" )) ;else if (strstr(label,"REC # / TYPE / VERS" )) {if (sta) {setstr(sta->recsno, buff, 20);setstr(sta->rectype,buff+20,20);setstr(sta->recver, buff+40,20);}}else if (strstr(label,"ANT # / TYPE" )) {if (sta) {setstr(sta->antsno,buff ,20);setstr(sta->antdes,buff+20,20);}}else if (strstr(label,"APPROX POSITION XYZ" )) {if (sta) {for (i=0,j=0;i<3;i++,j+=14) sta->pos[i]=str2num(buff,j,14);}}else if (strstr(label,"ANTENNA: DELTA H/E/N")) {if (sta) {for (i=0,j=0;i<3;i++,j+=14) del[i]=str2num(buff,j,14);sta->del[2]=del[0]; /* h */sta->del[0]=del[1]; /* e */sta->del[1]=del[2]; /* n */}}else if (strstr(label,"ANTENNA: DELTA X/Y/Z")) ; /* opt ver.3 */else if (strstr(label,"ANTENNA: PHASECENTER")) ; /* opt ver.3 */else if (strstr(label,"ANTENNA: B.SIGHT XYZ")) ; /* opt ver.3 */else if (strstr(label,"ANTENNA: ZERODIR AZI")) ; /* opt ver.3 */else if (strstr(label,"ANTENNA: ZERODIR XYZ")) ; /* opt ver.3 */else if (strstr(label,"CENTER OF MASS: XYZ" )) ; /* opt ver.3 */else if (strstr(label,"SYS / # / OBS TYPES" )) { /* ver.3 */if (!(p=strchr(syscodes,buff[0]))) {printf("invalid system code: sys=%c\n",buff[0]);return;}i=(int)(p-syscodes);n=(int)str2num(buff,3,3);for (j=nt=0,k=7;j<n;j++,k+=4) {if (k>58) {if (!fgets(buff,MAXRNXLEN,fp)) break;k=7;}if (nt<MAXOBSTYPE-1) setstr(tobs[i][nt++],buff+k,3);}*tobs[i][nt]='\0';/* change beidou B1 code: 3.02 draft -> 3.02 */if (i==5) {for (j=0;j<nt;j++) if (tobs[i][j][1]=='2') tobs[i][j][1]='1';}/* if unknown code in ver.3, set default code */for (j=0;j<nt;j++) {if (tobs[i][j][2]) continue;if (!(p=strchr(frqcodes,tobs[i][j][1]))) continue;tobs[i][j][2]=defcodes[i][(int)(p-frqcodes)];}}else if (strstr(label,"WAVELENGTH FACT L1/2")) ; /* opt ver.2 */else if (strstr(label,"# / TYPES OF OBSERV" )) { /* ver.2 */n=(int)str2num(buff,0,6);for (i=nt=0,j=10;i<n;i++,j+=6) {if (j>58) {if (!fgets(buff,MAXRNXLEN,fp)) break;j=10;}if (nt>=MAXOBSTYPE-1) continue;if (ver<=2.99) {setstr(str,buff+j,2);convcode(ver,SYS_GPS,str,tobs[0][nt]);convcode(ver,SYS_GLO,str,tobs[1][nt]);convcode(ver,SYS_GAL,str,tobs[2][nt]);convcode(ver,SYS_QZS,str,tobs[3][nt]);convcode(ver,SYS_SBS,str,tobs[4][nt]);convcode(ver,SYS_CMP,str,tobs[5][nt]);}nt++;}*tobs[0][nt]='\0';}else if (strstr(label,"SIGNAL STRENGTH UNIT")) ; /* opt ver.3 */else if (strstr(label,"INTERVAL" )) ; /* opt */else if (strstr(label,"TIME OF FIRST OBS" )) {if (!strncmp(buff+48,"GPS",3)) *tsys=TSYS_GPS;else if (!strncmp(buff+48,"GLO",3)) *tsys=TSYS_UTC;else if (!strncmp(buff+48,"GAL",3)) *tsys=TSYS_GAL;else if (!strncmp(buff+48,"QZS",3)) *tsys=TSYS_QZS; /* ver.3.02 */else if (!strncmp(buff+48,"BDT",3)) *tsys=TSYS_CMP; /* ver.3.02 */}else if (strstr(label,"TIME OF LAST OBS" )) ; /* opt */else if (strstr(label,"RCV CLOCK OFFS APPL" )) ; /* opt */else if (strstr(label,"SYS / DCBS APPLIED" )) ; /* opt ver.3 */else if (strstr(label,"SYS / PCVS APPLIED" )) ; /* opt ver.3 */else if (strstr(label,"SYS / SCALE FACTOR" )) ; /* opt ver.3 */else if (strstr(label,"SYS / PHASE SHIFTS" )) ; /* ver.3.01 */else if (strstr(label,"GLONASS SLOT / FRQ #")) { /* ver.3.02 */if (nav) {for (i=0,p=buff+4;i<8;i++,p+=8) {if (sscanf(p,"R%2d %2d",&prn,&fcn)<2) continue;if (1<=prn&&prn<=MAXPRNGLO) nav->glo_fcn[prn-1]=fcn+8;}}}else if (strstr(label,"GLONASS COD/PHS/BIS" )) { /* ver.3.02 */if (nav) {for (i=0,p=buff;i<4;i++,p+=13) {if (strncmp(p+1,"C1C",3)) nav->glo_cpbias[0]=str2num(p,5,8);else if (strncmp(p+1,"C1P",3)) nav->glo_cpbias[1]=str2num(p,5,8);else if (strncmp(p+1,"C2C",3)) nav->glo_cpbias[2]=str2num(p,5,8);else if (strncmp(p+1,"C2P",3)) nav->glo_cpbias[3]=str2num(p,5,8);}}}else if (strstr(label,"LEAP SECONDS" )) { /* opt */if (nav) nav->leaps=(int)str2num(buff,0,6);}else if (strstr(label,"# OF SALTELLITES" )) ; /* opt */else if (strstr(label,"PRN / # OF OBS" )) ; /* opt */
}
2. readrnxobs():读取o文件中全部观测值数据
重复调用readrnxobsb()函数,直到所有的观测值全被读完,或者是出现了某个历元没有卫星的情况为止
- 为
data[]开辟空间 - while大循环调用
readrnxobsb()每次读取一个历元的观测数据,获取观测值数n - 遍历
data[],如果时间系统为UTC,转为GPST,调用saveslips() - 调用
screent(),判断传入的时间是否符合起始时间ts,结束时间te,时间间隔tint - 遍历
data[],调用restslips(),addobsdata()将data[]信息存到obs中
/* read RINEX observation data -----------------------------------------------* args:FILE *fp I 传入的Rinex文件指针* gtime_t ts I 开始时间* gtime_t te I 结束时间* double tint I 时间间隔* const char *opt I 选项* int rcv I 接收机号* double ver I Rinex文件版本* int *tsys I 时间系统* char tobs[][MAXOBSTYPE][4] I 观测值类型数组* obs_t *obs O obsd_t类型的观测值数组* sta_t *sta O 卫星数组----------------------------------------------------------------------------*/static int readrnxobs(FILE *fp, gtime_t ts, gtime_t te, double tint,const char *opt, int rcv, double ver, int tsys,char tobs[][MAXOBSTYPE][4], obs_t *obs)
{obsd_t *data;unsigned char slips[MAXSAT][NFREQ]={{0}};int i,n,flag=0,stat=0;rcv=1;if (!obs||rcv>MAXRCV) return 0;if (!(data=(obsd_t *)malloc(sizeof(obsd_t)*MAXOBS))) return 0;// 循环调用 readrnxobsb() 每次读一个历元的观测值/* read rinex obs data body */while ((n=readrnxobsb(fp,opt,ver,tobs,&flag,data))>=0&&stat>=0) {for (i=0;i<n;i++) {// 如果是 UTC 时间,转为 GPST/* utc -> gpst */if (tsys==TSYS_UTC) data[i].time=utc2gpst(data[i].time);// 调用 saveslips() 保存周跳标记 LLI 到 slips/* save cycle-slip */saveslips(slips,data+i);}// 调用 screent() 按判断观测值是否在解算时间内/* screen data by time */if (n>0&&!screent(data[0].time,ts,te,tint)) continue;// 遍历 data[],将信息存到 obs 中for (i=0;i<n;i++) {/* restore cycle-slip */restslips(slips,data+i);data[i].rcv=(unsigned char)rcv;// 调用 addobsdata(),在 obs_t 类型的 obs 添加新的观测值 obsd_t 类型的 data,// 检验内存够不够,不够就 realloc()/* save obs data */if ((stat=addobsdata(obs,data+i))<0) break;}}free(data);return stat;
}
3. readrnxobsb():读取一个观测历元的观测数据
-
调用
set_sysmask()获取卫星系统掩码mask,mask在之后decode_obsdata()中会用到,mask中没有的卫星系统不用。 -
调用set_index(),将将tobs数组中存的观测值类型信息存到sigind_t类型的index[]结构体数组中,此时传入的tobs数组是二维数组,每个传入的tobs都存了一个卫星系统的观测值类型,同理index[]的一个元素就存一个卫星系统的所有观测值类型。
-
while大循环,fgets()存一行的数据
- 如果是第一行,则调用
decode_obsepoch()函数解码首行数据(包括历元时刻、卫星数、卫星编号、历元状态等信息),并将信息保存 ,获取的卫星数量nsat是判断循环次数的关键。 - 如果不是第一行则调用
decode_obsdata()函数对该行观测数据进行数据解码,读取一个历元内一颗卫星的观测值 ,到data[n] - 知道读取数量 i 等于
decode_obsepoch()获取的卫星数量nsat,结束循环,返回读取的观测值数(卫星数)
- 如果是第一行,则调用
/* read RINEX observation data body ------------------------------------------* args:FILE *fp I I 传入的Rinex文件指针* const char *opt I 选项* double ver I Rinex文件版本* int *tsys I 时间系统* char tobs[][MAXOBSTYPE][4] I 观测值类型数组* int *flag I 历元信息状态* obsd_t *data O obsd_t类型的观测值数组* sta_t *sta O 卫星数组------------------------------------------------------------------------------*/
static int readrnxobsb(FILE *fp, const char *opt, double ver,char tobs[][MAXOBSTYPE][4], int *flag, obsd_t *data)
{gtime_t time={0};sigind_t index[6]={{0}};char buff[MAXRNXLEN];int i=0,n=0,nsat=0,sats[MAXOBS]={0},mask;/* set system mask */mask=set_sysmask(opt);// 调用 set_index(),每个系统建立一个索引// 建立索引。将三维观测值类型数组退化成二维数组,建立一个索引数组// 通过判断 nsys 值对 set_index 进行传参,然后记录在 sigind_t 结构体中/* set signal index */set_index(ver,SYS_GPS,opt,tobs[0],index );set_index(ver,SYS_GLO,opt,tobs[1],index+1);set_index(ver,SYS_GAL,opt,tobs[2],index+2);set_index(ver,SYS_QZS,opt,tobs[3],index+3);set_index(ver,SYS_SBS,opt,tobs[4],index+4);set_index(ver,SYS_CMP,opt,tobs[5],index+5);// 利用 fgets() 函数缓存一行数据/* read record */while (fgets(buff,MAXRNXLEN,fp)) {// 记录一个观测历元的有效性、时间和卫星数/* decode obs epoch */// 如果是第一行,则调用 decode_obsepoch() 函数解码首行数据(包括历元时刻、卫星数、卫星编号、历元状态等信息),并将信息保存if (i==0) {if ((nsat=decode_obsepoch(fp,buff,ver,&time,flag,sats))<=0) {continue;}}else if (*flag<=2||*flag==6) {data[n].time=time;data[n].sat=(unsigned char)sats[i-1];// 如果不是第一行则调用 decode_obsdata() 函数对该行观测数据进行数据解码/* decode obs data */if (decode_obsdata(fp,buff,ver,mask,index,data+n)&&n<MAXOBS) n++;}if (++i>nsat) return n;}return -1;
}
4. decode_obsepoch():解码历元首行数据
2、3版本观测值文件有区别:
-
2版本:
-
每历元首行数据前26位为历元时间(yy mm dd hh mm ss),年是 2 位表示,str2time() 函数中可以把年的前两位也补上。
-
29位epoch flag ,记录该历元状况,0表示正常,3:new site,4:header info,5:external event
-
30~32位为卫星数量
-
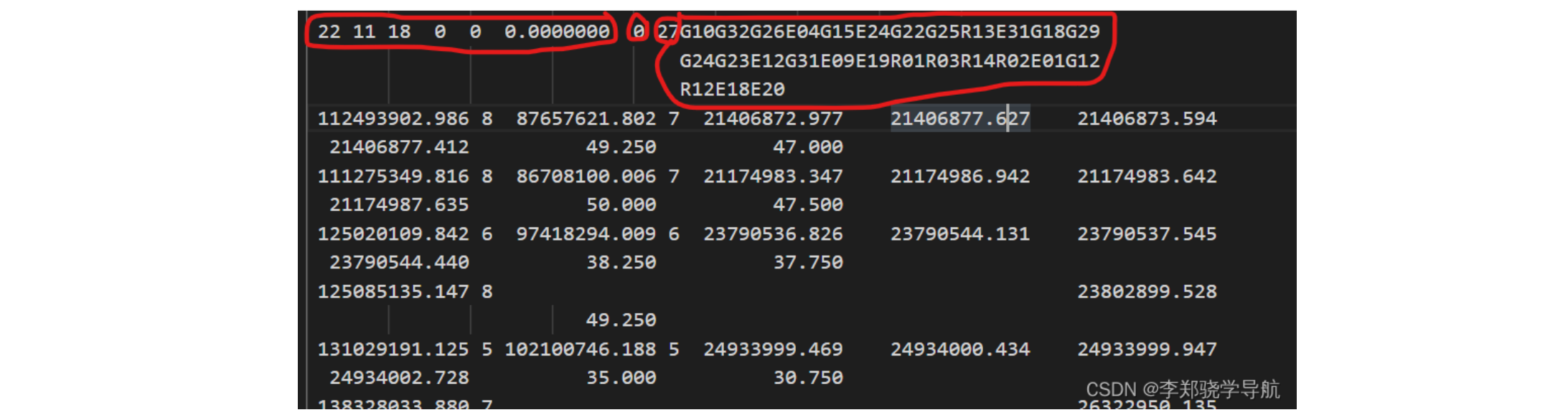
33~68:各个卫星的PRN号,观测到的卫星数>12时,一行的信息存储不下会自动换行,并且卫星的PRN号与前一行对其
-
历元信息往下一行就是记录观测值的数据块,以每颗卫星为单位,依照头文件中的观测值类型及顺序,从左到右依次排列,每行记录5个观测值,一行不够时转下行。当所有卫星数据记录完后,转到下一个历元。 观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致。
-
3版本:

- 每历元数据用用**>**开头
- 2~29位为历元时间(yyyy mm dd hh mm ss)
- 32位为 epoch flag
- 后面是接收机钟差(s)
- 每组数据中的每一行表示一颗卫星的观测值,观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致
-
程序执行流程:
- 2版本:
- 读取卫星数到
n - 读取
epoh flag到flag - 读取历元时间
time - 循环读取卫星ID(G10、G32、G26) ,读到68列,还没把卫星读完,就fgets()读取新的一行
- 将卫星ID转为
satellite number,存到sats[]数组中
- 读取卫星数到
- 3版本:
- 读取卫星数量
n - 读取
epoh flag到flag - 读取历元时间
time
- 读取卫星数量
/* decode observation epoch --------------------------------------------------* args:FILE *fp I 传入的Rinex文件指针* char *buff I fgets()读取到一行数据的首地址* double ver I Rinex文件版本* gtime_t *time O 历元时间* int *flag O epoh flag (o:ok,3:new site,4:header info,5:external event)* int *sats O 历元卫星信息,2版本才有* return:卫星数量----------------------------------------------------------------------------*/
static int decode_obsepoch(FILE *fp, char *buff, double ver, gtime_t *time,int *flag, int *sats)
{int i,j,n;char satid[8]="";if (ver<=2.99) { /* ver.2 */if ((n=(int)str2num(buff,29,3))<=0) return 0; // 读取卫星数到 n/* epoch flag: 3:new site,4:header info,5:external event */*flag=(int)str2num(buff,28,1); // 读取 epoh flagif (3<=*flag&&*flag<=5) return n;if (str2time(buff,0,26,time)) { // 读取历元时间printf("rinex obs invalid epoch: epoch=%26.26s\n",buff);return 0;}for (i=0,j=32;i<n;i++,j+=3) { // 循环读取卫星ID(G10、G32、G26)if (j>=68) { // 读到 68 列,还没把卫星读完,就 fgets() 读取新的一行if (!fgets(buff,MAXRNXLEN,fp)) break;j=32;}if (i<MAXOBS) {strncpy(satid,buff+j,3);sats[i]=satid2no(satid); // 将卫星ID转为 satellite number,存到sats[]数组中}}}else { /* ver.3 */if ((n=(int)str2num(buff,32,3))<=0) return 0; // 读取卫星数量*flag=(int)str2num(buff,31,1); // 读取 epoh flagif (3<=*flag&&*flag<=5) return n;// 识别历元第一个字符是否匹配以及历元时间是否可以正常转换if (buff[0]!='>'||str2time(buff,1,28,time)) {printf("rinex obs invalid epoch: epoch=%29.29s\n",buff);return 0;}}return n;
}
5. decode_obsdata():读取一个历元内一颗卫星的观测值
- 3 版本,读取卫星
satellite number存到obs->sat。 - 星系统和
mask做与运算,判断卫星系统是否启用。 - 根据卫星系统分配索引
ind。 - 根据索引
ind中的观测值类型,循环读取观测值,读取一个历元内,一颗卫星的观测值,记录有效的观测值到val[i],记录记录信号失锁到lli[i]。 - 初始化
obs各观测值数组,赋空。 - 遍历观测值类型,同频率的观测码,下标分别存到
k[],l[]中 ,p[]存频率索引,后面obs->P[0]就是利用 L1 载波观测到的伪距,obs->P[1]就是利用L2载波观测到的伪距 - 同一个频率有不同的观测码,取优先级高的。
- 根据索引
ind中的观测值类型,遍历观测值,val[i]、lli[i]存入obs中。
/* decode observation data ---------------------------------------------------* args:FILE *fp I 传入的Rinex文件指针* char *buff I fgets()读取到一行数据的首地址* double ver I Rinex文件版本* int mask I 卫星系统掩码* sigind_t *index I 观测数据类型索引* obsd_t *obs O 观测数据OBS ----------------------------------------------------------------------------*/
static int decode_obsdata(FILE *fp, char *buff, double ver, int mask,sigind_t *index, obsd_t *obs)
{sigind_t *ind;double val[MAXOBSTYPE]={0};unsigned char lli[MAXOBSTYPE]={0};char satid[8]="";int i,j,n,m,stat=1,p[MAXOBSTYPE],k[16],l[16];// 3版本,读取卫星 satellite number 存到 obs->satif (ver>2.99) { /* ver.3 */strncpy(satid,buff,3);//strncpy(obs->csat,buff,3);obs->sat=(unsigned char)satid2no(satid); }if (!obs->sat) {//printf("decode_obsdata: unsupported sat sat=%s\n",satid);stat=0;}// 卫星系统和 mask 做与运算,判断卫星系统是否启用else if (!(satsys(obs->sat,NULL)&mask)) { stat=0;}// 根据卫星系统分配索引/* read obs data fields */ switch (satsys(obs->sat,NULL)) {case SYS_GLO: ind=index+1; break;case SYS_GAL: ind=index+2; break;case SYS_QZS: ind=index+3; break;case SYS_SBS: ind=index+4; break;case SYS_CMP: ind=index+5; break;default: ind=index ; break;}// 根据索引 ind 中的观测值类型,循环读取观测值,读取一个历元内,一颗卫星的观测值// 2 版本从 0 开始,3 版本从 3 开始,一次读取 16 个字符(每一个卫星的观测数据)for (i=0,j=ver<=2.99?0:3;i<ind->n;i++,j+=16) {// 2版本,一行读不完就 fgets 读下一行if (ver<=2.99&&j>=80) { /* ver.2 */if (!fgets(buff,MAXRNXLEN,fp)) break;j=0;}if (stat) {val[i]=str2num(buff,j,14)+ind->shift[i]; // 记录有效的观测值lli[i]=(unsigned char)str2num(buff,j+14,1)&3; // 记录信号失锁,判定周跳}}if (!stat) return 0;// 初始化 obs 各观测值数组,赋空for (i=0;i<NFREQ+NEXOBS;i++) {obs->P[i]=obs->L[i]=0.0; obs->D[i]=0.0f;obs->SNR[i]=obs->LLI[i]=obs->code[i]=0;}// 遍历观测值类型,同频率的观测码,下标分别存到 k[],l[]/* assign position in obs data */for (i=n=m=0;i<ind->n;i++) {p[i]=ver<=2.11?ind->frq[i]-1:ind->pos[i];if (ind->type[i]==0&&p[i]==0) k[n++]=i; /* C1? index */if (ind->type[i]==0&&p[i]==1) l[m++]=i; /* C2? index */}if (ver<=2.11) {// 同一个频率有不同的观测码,取优先级高的/* if multiple codes (C1/P1,C2/P2), select higher priority */if (n>=2) {if (val[k[0]]==0.0&&val[k[1]]==0.0) {p[k[0]]=-1; p[k[1]]=-1;}else if (val[k[0]]!=0.0&&val[k[1]]==0.0) {p[k[0]]=0; p[k[1]]=-1;}else if (val[k[0]]==0.0&&val[k[1]]!=0.0) {p[k[0]]=-1; p[k[1]]=0;}else if (ind->pri[k[1]]>ind->pri[k[0]]) {p[k[1]]=0; p[k[0]]=NEXOBS<1?-1:NFREQ;}else {p[k[0]]=0; p[k[1]]=NEXOBS<1?-1:NFREQ;}}if (m>=2) {if (val[l[0]]==0.0&&val[l[1]]==0.0) {p[l[0]]=-1; p[l[1]]=-1;}else if (val[l[0]]!=0.0&&val[l[1]]==0.0) {p[l[0]]=1; p[l[1]]=-1;}else if (val[l[0]]==0.0&&val[l[1]]!=0.0) {p[l[0]]=-1; p[l[1]]=1; }else if (ind->pri[l[1]]>ind->pri[l[0]]) {p[l[1]]=1; p[l[0]]=NEXOBS<2?-1:NFREQ+1;}else {p[l[0]]=1; p[l[1]]=NEXOBS<2?-1:NFREQ+1;}}}// obs->P 代表着这个观测值结构体中的伪距观测值。不管是伪距观测值还是载波相位观测值和多普勒观测值,都是利用各种载波得到的// obs->P[0] 就是利用 L1 载波观测到的伪距,obs->P[1] 就是利用 L2 载波观测到的伪距…// 保存数据部分,每一个观测类型的组成包括:观测值(保留三位小数) + LLI + 信号强度,所以 obs 指向的三个可能代表的就是这三个// 遍历观测值,存入 obs 中/* save obs data */ j=0;for (i=0;i<ind->n;i++) {if (p[i]<0||val[i]==0.0) continue;switch (ind->type[i]) {case 0: obs->P[p[i]]=val[i]; obs->code[p[i]]=ind->code[i]; obs->type[j++]=code2obs(obs->code[p[i]],&p[i]); break;case 1: obs->L[p[i]]=val[i]; obs->LLI [p[i]]=lli[i]; break;case 2: obs->D[p[i]]=(float)val[i]; break;case 3: obs->SNR[p[i]]=(unsigned char)(val[i]*4.0+0.5); break;}}return 1;
}
7、星历文件读取
1. decode_navh()、decode_gnavh()、decode_hnavh()
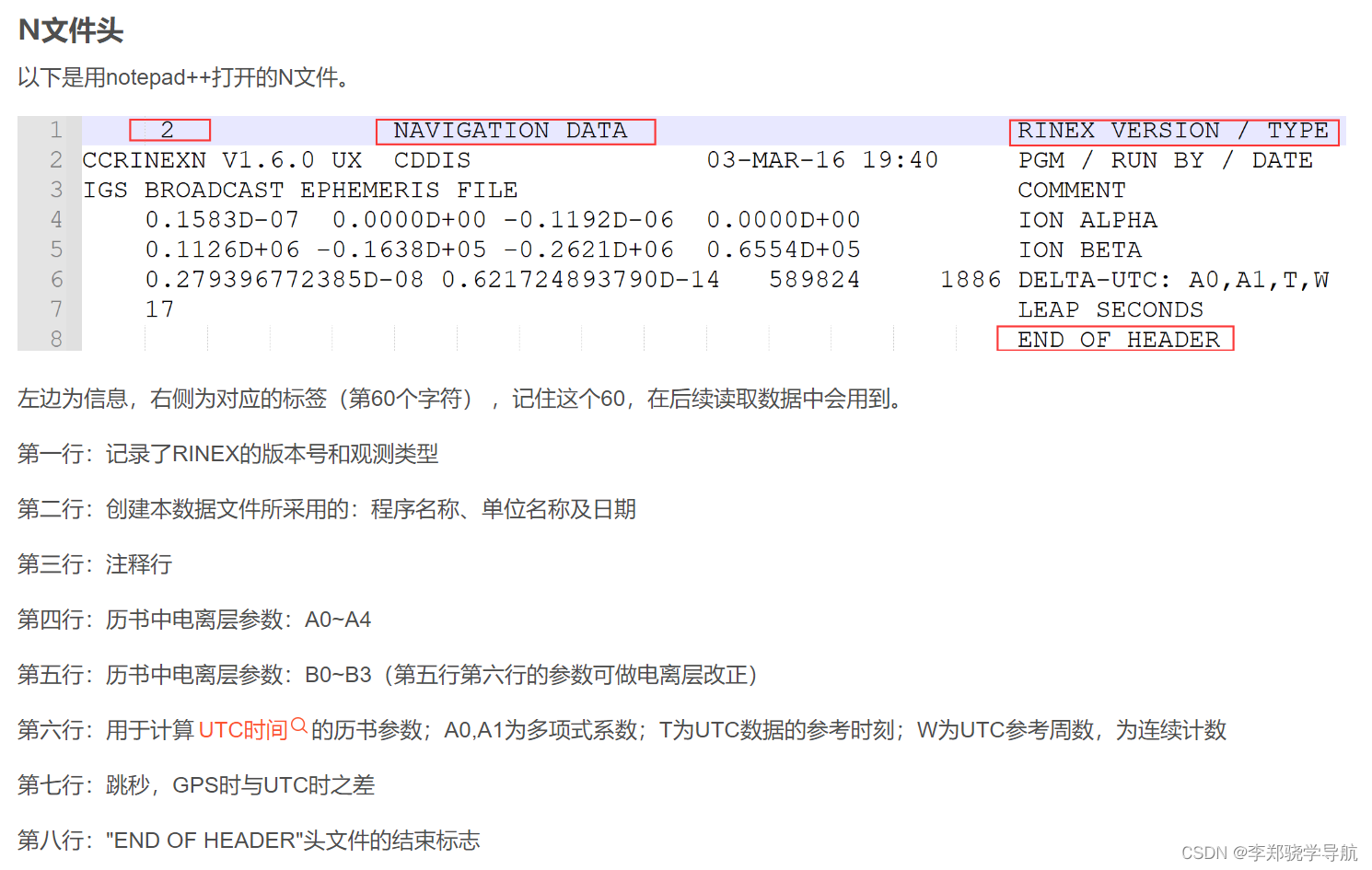
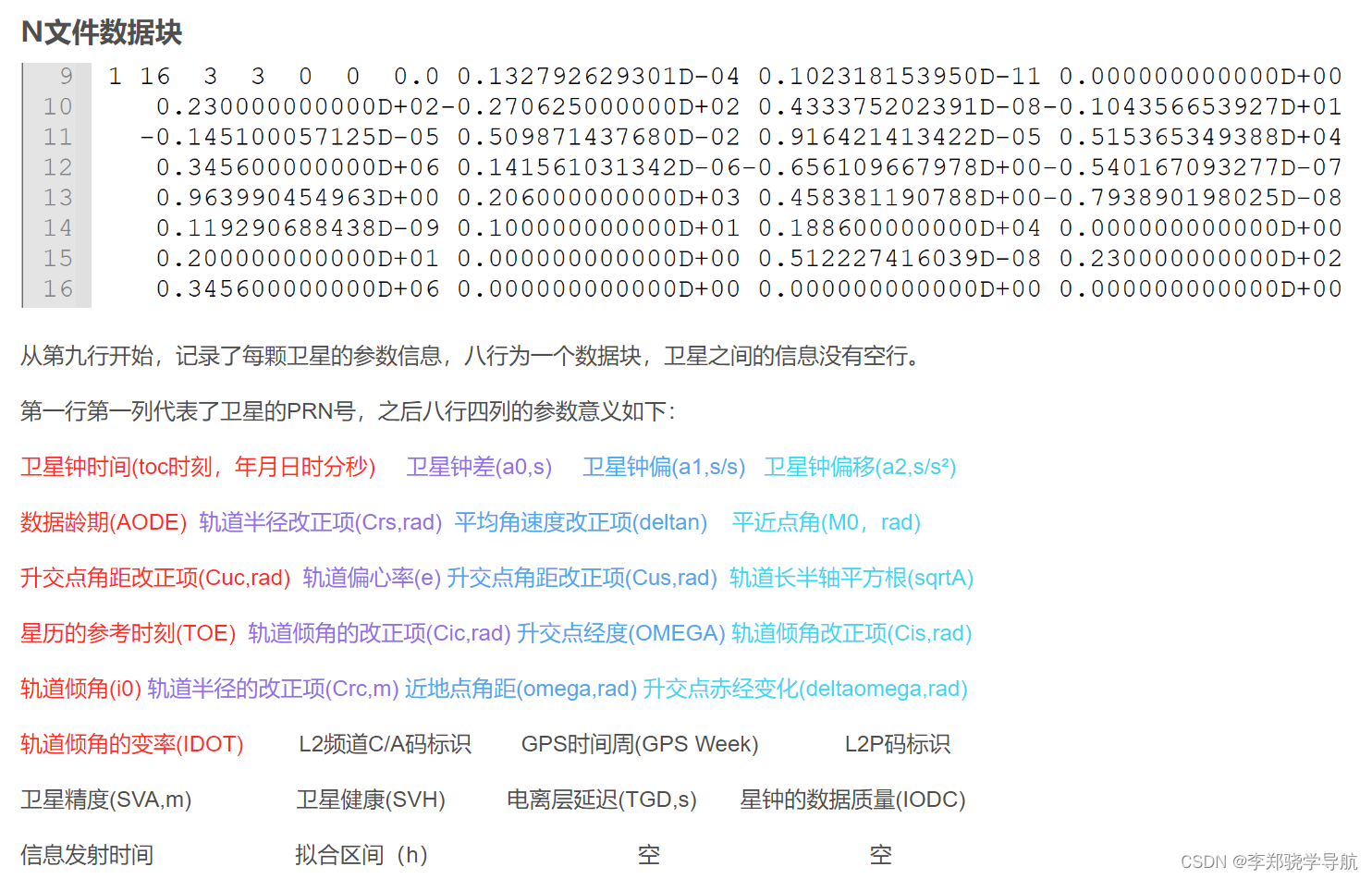
以 decode_navh() 为例,对应着格式一点点读:
static void decode_navh(char *buff, nav_t *nav)
{int i,j;char *label=buff+60;if (strstr(label,"ION ALPHA" )) { /* opt ver.2 */if (nav) {for (i=0,j=2;i<4;i++,j+=12) nav->ion_gps[i]=str2num(buff,j,12);}}else if (strstr(label,"ION BETA" )) { /* opt ver.2 */if (nav) {for (i=0,j=2;i<4;i++,j+=12) nav->ion_gps[i+4]=str2num(buff,j,12);}}else if (strstr(label,"DELTA-UTC: A0,A1,T,W")) { /* opt ver.2 */if (nav) {for (i=0,j=3;i<2;i++,j+=19) nav->utc_gps[i]=str2num(buff,j,19);for (;i<4;i++,j+=9) nav->utc_gps[i]=str2num(buff,j,9);}}else if (strstr(label,"IONOSPHERIC CORR" )) { /* opt ver.3 */if (nav) {if (!strncmp(buff,"GPSA",4)) {for (i=0,j=5;i<4;i++,j+=12) nav->ion_gps[i]=str2num(buff,j,12);}else if (!strncmp(buff,"GPSB",4)) {for (i=0,j=5;i<4;i++,j+=12) nav->ion_gps[i+4]=str2num(buff,j,12);}else if (!strncmp(buff,"GAL",3)) {for (i=0,j=5;i<4;i++,j+=12) nav->ion_gal[i]=str2num(buff,j,12);}else if (!strncmp(buff,"QZSA",4)) { /* v.3.02 */for (i=0,j=5;i<4;i++,j+=12) nav->ion_qzs[i]=str2num(buff,j,12);}else if (!strncmp(buff,"QZSB",4)) { /* v.3.02 */for (i=0,j=5;i<4;i++,j+=12) nav->ion_qzs[i+4]=str2num(buff,j,12);}else if (!strncmp(buff,"BDSA",4)) { /* v.3.02 */for (i=0,j=5;i<4;i++,j+=12) nav->ion_cmp[i]=str2num(buff,j,12);}else if (!strncmp(buff,"BDSB",4)) { /* v.3.02 */for (i=0,j=5;i<4;i++,j+=12) nav->ion_cmp[i+4]=str2num(buff,j,12);}}}else if (strstr(label,"TIME SYSTEM CORR" )) { /* opt ver.3 */if (nav) {if (!strncmp(buff,"GPUT",4)) {nav->utc_gps[0]=str2num(buff, 5,17);nav->utc_gps[1]=str2num(buff,22,16);nav->utc_gps[2]=str2num(buff,38, 7);nav->utc_gps[3]=str2num(buff,45, 5);}else if (!strncmp(buff,"GLUT",4)) {nav->utc_glo[0]=str2num(buff, 5,17);nav->utc_glo[1]=str2num(buff,22,16);}else if (!strncmp(buff,"GAUT",4)) { /* v.3.02 */nav->utc_gal[0]=str2num(buff, 5,17);nav->utc_gal[1]=str2num(buff,22,16);nav->utc_gal[2]=str2num(buff,38, 7);nav->utc_gal[3]=str2num(buff,45, 5);}else if (!strncmp(buff,"QZUT",4)) { /* v.3.02 */nav->utc_qzs[0]=str2num(buff, 5,17);nav->utc_qzs[1]=str2num(buff,22,16);nav->utc_qzs[2]=str2num(buff,38, 7);nav->utc_qzs[3]=str2num(buff,45, 5);}else if (!strncmp(buff,"BDUT",4)) { /* v.3.02 */nav->utc_cmp[0]=str2num(buff, 5,17);nav->utc_cmp[1]=str2num(buff,22,16);nav->utc_cmp[2]=str2num(buff,38, 7);nav->utc_cmp[3]=str2num(buff,45, 5);}else if (!strncmp(buff,"SBUT",4)) { /* v.3.02 */nav->utc_cmp[0]=str2num(buff, 5,17);nav->utc_cmp[1]=str2num(buff,22,16);nav->utc_cmp[2]=str2num(buff,38, 7);nav->utc_cmp[3]=str2num(buff,45, 5);}}}else if (strstr(label,"LEAP SECONDS" )) { /* opt */if (nav) nav->leaps=(int)str2num(buff,0,6);}
}
2. readrnxnav():读取星历文件,添加到nav结构体中
- add_eph():nav->eph[] 中添加 eph 星历数据,nav->n 表示 eph 数量。
- add_geph():nav->geph[] 中添加 GLONASS 星历数据,nav->ng 表示 geph 数量。
- add_seph():nav->seph[] 中添加 SBAS 星历数据,nav->ns 表示 seph 数量。
static int readrnxnav(FILE *fp, const char *opt, double ver, int sys,nav_t *nav)
{eph_t eph={0};geph_t geph={0};int stat,type;if (!nav) return 0;/* read rinex navigation data body */while ((stat=readrnxnavb(fp,opt,ver,sys,&type,&eph,&geph))>=0) {/* add ephemeris to navigation data */if (stat) {switch (type) {case 1 : stat=add_geph(nav,&geph); break;default: stat=add_eph (nav,&eph ); break;}if (!stat) return 0;}}return nav->n>0||nav->ng>0;
}
3. readrnxnavb():读取一个历元的星历数据,添加到 eph 结构体中
-
调用
set_sysmask()获取卫星系统掩码 -
循环读取一行行,记录TOC,读取到
data[],i记录读取的数据数量,读够数量调用decode_eph()等函数赋值给eph_t结构体
/* read rinex navigation data body -------------------------------------------*/
static int readrnxnavb(FILE *fp, const char *opt, double ver, int sys,int *type, eph_t *eph, geph_t *geph)
{gtime_t toc;double data[64];int i=0,j,prn,sat=0,sp=3,mask;char buff[MAXRNXLEN],id[8]="",*p;/* set system mask */mask=set_sysmask(opt);// 循环读取一行行,读取到 data[],i 记录读取的数据数量,读够数量进入 decode_eph() 赋值给 eph_t 结构体while (fgets(buff,MAXRNXLEN,fp)) {if (i==0) {/* decode satellite field */if (ver>=3.0||sys==SYS_GAL||sys==SYS_QZS) { /* ver.3 or GAL/QZS */strncpy(id,buff,3);sat=satid2no(id);sp=4; // 3以上版本,GALileo,QZSS sp 都为 4if (ver>=3.0) sys=satsys(sat,NULL);}else {prn=(int)str2num(buff,0,2);if (sys==SYS_SBS) {sat=satno(SYS_SBS,prn+100);}else if (sys==SYS_GLO) {sat=satno(SYS_GLO,prn);}else if (93<=prn&&prn<=97) { /* extension */sat=satno(SYS_QZS,prn+100);}else sat=satno(SYS_GPS,prn);}/* decode toc field */if (str2time(buff+sp,0,19,&toc)) { // 读取卫星钟时间 TOCprintf("rinex nav toc error: %23.23s\n",buff);return 0;}/* decode data fields */for (j=0,p=buff+sp+19;j<3;j++,p+=19) { // 首行数据读3列,除了TOC还有3列data[i++]=str2num(p,0,19);}}else {/* decode data fields */for (j=0,p=buff+sp;j<4;j++,p+=19) { // 其它行数据都读 4 列data[i++]=str2num(p,0,19);}/* decode ephemeris */if (sys==SYS_GLO&&i>=15) {if (!(mask&sys)) return 0;*type=1;return decode_geph(ver,sat,toc,data,geph);}else if (i>=31) {if (!(mask&sys)) return 0;*type=0;return decode_eph(ver,sat,toc,data,eph);}}}return -1;
}else sat=satno(SYS_GPS,prn);}/* decode toc field */if (str2time(buff+sp,0,19,&toc)) { // 读取卫星钟时间 TOCprintf("rinex nav toc error: %23.23s\n",buff);return 0;}/* decode data fields */for (j=0,p=buff+sp+19;j<3;j++,p+=19) { // 首行数据读3列,除了TOC还有3列data[i++]=str2num(p,0,19);}}else {/* decode data fields */for (j=0,p=buff+sp;j<4;j++,p+=19) { // 其它行数据都读 4 列data[i++]=str2num(p,0,19);}/* decode ephemeris */if (sys==SYS_GLO&&i>=15) {if (!(mask&sys)) return 0;*type=1;return decode_geph(ver,sat,toc,data,geph);}else if (i>=31) {if (!(mask&sys)) return 0;*type=0;return decode_eph(ver,sat,toc,data,eph);}}}return -1;
}