SARAS多步TD目标算法
代码仓库:https://github.com/daiyizheng/DL/tree/master/09-rl
SARSA算法是on-policy 时序差分
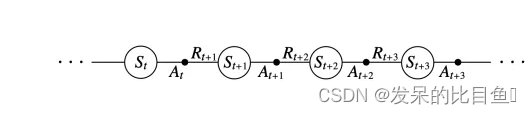
在迭代的时候,我们基于 ϵ \epsilon ϵ-贪婪法在当前状态 S t S_t St 选择一个动作 A t A_t At ,然后会进入到下一个状态 S t + 1 S_{t+1} St+1 ,同时获得奖励 R t + 1 R_{t+1} Rt+1 ,在新的状态 S t + 1 S_{t+1} St+1 我们同样基于 ϵ \epsilon ϵ-贪婪法选择一个动作 A t + 1 A_{t+1} At+1 ,然后用它来更新我们的价值函数,更新公式如下:
Q ( S t , A t ) ← Q ( S t , A t ) + α [ R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S t , A t ) ] Q\left(S_t, A_t\right) \leftarrow Q\left(S_t, A_t\right)+\alpha\left[R_{t+1}+\gamma Q\left(S_{t+1}, A_{t+1}\right)-Q\left(S_t, A_t\right)\right] Q(St,At)←Q(St,At)+α[Rt+1+γQ(St+1,At+1)−Q(St,At)]
- 注意: 这里我们选择的动作 A t + 1 A_{t+1} At+1 ,就是下一步要执行的动作,这点是和Q-Learning算法的最大不同
- 这里的 TD Target: δ t = R t + 1 + γ Q ( S t + 1 , A t + 1 ) \delta_t=R_{t+1}+\gamma Q\left(S_{t+1}, A_{t+1}\right) δt=Rt+1+γQ(St+1,At+1)
- 在每一个非终止状态 S t S_t St
- 进行一次更新,我们要获取 5 个数据, < S t , A t , R t + 1 , S t + 1 , A t + 1 > <S_t, A_t, R_{t+1}, S_{t+1}, A_{t+1}> <St,At,Rt+1,St+1,At+1>
那么n-step Sarsa如何计算
Q ( S t , A t ) ← Q ( S t , A t ) + α ( q t ( n ) − Q ( S t , A t ) ) Q\left(S_t, A_t\right) \leftarrow Q\left(S_t, A_t\right)+\alpha\left(q_t^{(n)}-Q\left(S_t, A_t\right)\right) Q(St,At)←Q(St,At)+α(qt(n)−Q(St,At))
其中 q ( n ) q_{(n)} q(n) 为:
q t ( n ) = R t + 1 + γ R t + 2 + ⋯ + γ n − 1 R t + n + γ n Q ( S t + n , A t + n ) q_t^{(n)}=R_{t+1}+\gamma R_{t+2}+\cdots+\gamma^{n-1} R_{t+n}+\gamma^n Q\left(S_{t+n}, A_{t+n}\right) qt(n)=Rt+1+γRt+2+⋯+γn−1Rt+n+γnQ(St+n,At+n)
代码
- 构建环境
import gym#定义环境
class MyWrapper(gym.Wrapper):def __init__(self):#is_slippery控制会不会滑env = gym.make('FrozenLake-v1',render_mode='rgb_array',is_slippery=False)super().__init__(env)self.env = envdef reset(self):state, _ = self.env.reset()return statedef step(self, action):state, reward, terminated, truncated, info = self.env.step(action)over = terminated or truncated#走一步扣一份,逼迫机器人尽快结束游戏if not over:reward = -1#掉坑扣100分if over and reward == 0:reward = -100return state, reward, over#打印游戏图像def show(self):from matplotlib import pyplot as pltplt.figure(figsize=(3, 3))plt.imshow(self.env.render())plt.show()env = MyWrapper()env.reset()env.show()
- 构建Q表
import numpy as np#初始化Q表,定义了每个状态下每个动作的价值
Q = np.zeros((16, 4))Q
- 构建数据
from IPython import display
import random#玩一局游戏并记录数据
def play(show=False):state = []action = []reward = []next_state = []over = []s = env.reset()o = Falsewhile not o:a = Q[s].argmax()if random.random() < 0.1:a = env.action_space.sample()ns, r, o = env.step(a)state.append(s)action.append(a)reward.append(r)next_state.append(ns)over.append(o)s = nsif show:display.clear_output(wait=True)env.show()return state, action, reward, next_state, over, sum(reward)play()[-1]
- 训练
#训练
def train():#训练N局for epoch in range(50000):#玩一局游戏,得到数据state, action, reward, next_state, over, _ = play()for i in range(len(state)):#计算valuevalue = Q[state[i], action[i]]#计算target#累加未来N步的reward,越远的折扣越大#这里是在使用蒙特卡洛方法估计targetreward_s = 0for j in range(i, min(len(state), i + 5)):reward_s += reward[j] * 0.9**(j - i)#计算最后一步的value,这是target的一部分,按距离给折扣target = Q[next_state[j]].max() * 0.9**(j - i + 1)#如果最后一步已经结束,则不需要考虑状态价值#最后累加reward就是targettarget = target + reward_s#更新Q表Q[state[i], action[i]] += (target - value) * 0.05if epoch % 5000 == 0:test_result = sum([play()[-1] for _ in range(20)]) / 20print(epoch, test_result)train()




![[C++]Leetcode17电话号码的字母组合](https://img-blog.csdnimg.cn/ece69d0537cc4377a66333b238d75901.png)