1.什么是线程
相对于进程而言,进程是承担资源调度的实体,线程在进程内部运行,是操作系统调度的基本单位。
在一个程序里的一个执行路线就叫做线程(thread)。更准确的定义是:线程是“一个进程内部的控制序列。
一切进程至少都有一个执行线程。
线程在进程内部运行,本质是在进程地址空间内运行。
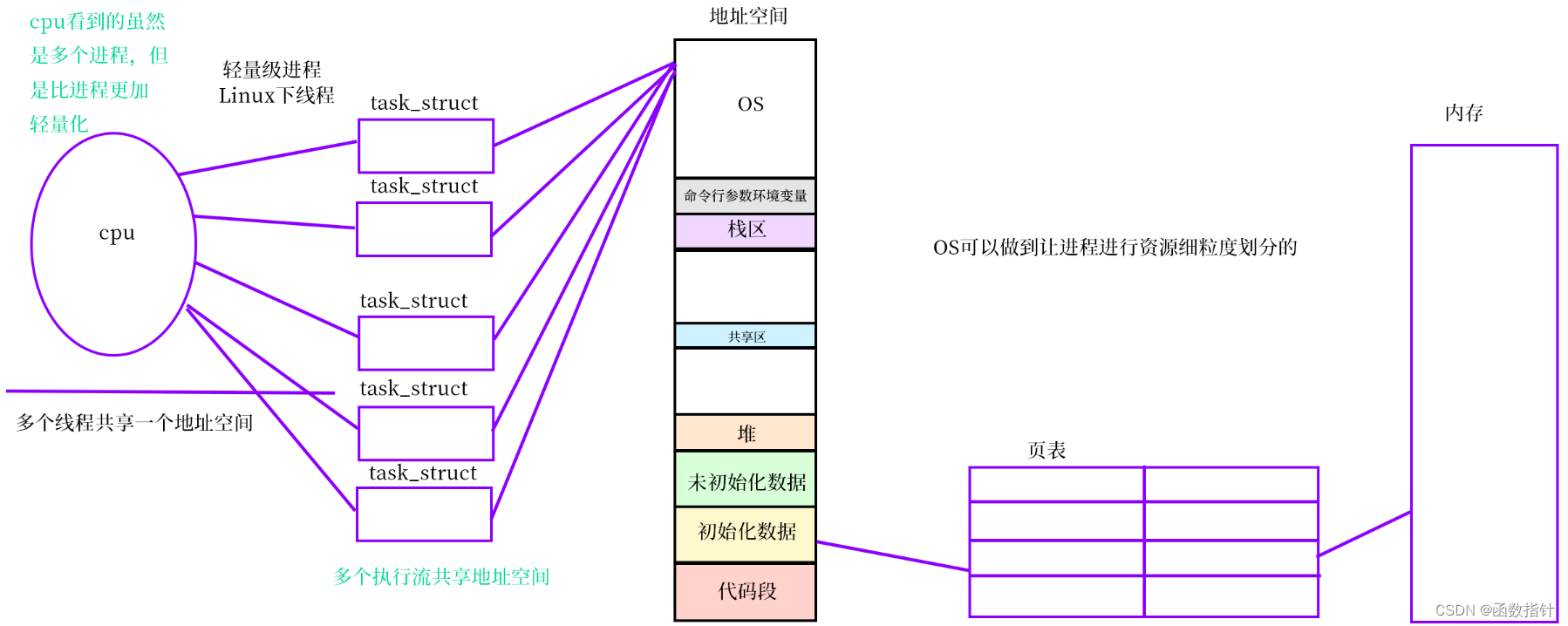
在Linux系统中,在CPU眼中,看到的PCB都要比传统的进程更加轻量化。
透过进程虚拟地址空间,可以看到进程的大部分资源,将进程资源合理分配给每个执行流,就形成了线程执行流。
从上图中可以说明,cpu在调度的时候是不知道它调度的是线程还是进程的。
如果我们在创建“进程”时,只创建task_struct,并要求创建出来的task_struct和父task_struct共享进程地址空间和页表,那么创建的结果就是上面这样的。
现在创建的进程不再给你独立分配地址空间和页表,而是都指向同一块地址空间,共享同一块页表。所以这四个task_struct看到的资源都是一样的,我们后续可以通过某种方式把代码区拆分成4块,让这四个task_struct执行不同的代码区域,上述的区域(数据区,堆区,栈区)也是类似处理方式。换言之,我们后续创建的3个task_struct都各自有自己的一小份代码和数据,我们把这样的一份task_struct称之为线程。对于Linux下的进程来说,Linux其实并没有真正的对线程创建对应的数据结构。
因此:
线程本身是在进程内部运行的,操作系统中存在大量的进程,一个进程内又存在一个或多个线程,因此线程的数量一定比进程的数量多(线程 : 进程 一定是n : 1),当线程的数量足够多的时候,很明显线程的执行粒度要比进程更细。
对于这么多的线程我们OS需要对其做管理(先描述,再组织),在大部分的OS中,线程都有一个tcb。如果我们的系统实现的是真线程,比如说windows平台,它就要分别对进程和线程设计各自的描述的数据块(结构体),并且很多线程在一个进程内部,所以还要维护线程tcb和进程pcb之间的关系。所以这样写出的代码,其tcb和pcb两个数据结构之间的耦合度非常复杂。设计tcb和pcb的人认为这样的进程和线程在执行流层面上是不一样的。但是Linux不这样想:在概念上没有进程和线程的区分,只有一个叫做执行流。Linux的线程是用进程PCB模拟的。所以在Linux当中,其PCB和TCB是一回事!!!Linux的线程用进程PCB模拟的好处很明显:
- 不用单独设计tcb了(Linux认为tcb和pcb的属性上很大部分重叠了,不需要单独设计pcb)。
- 不用维护tcb和pcb之间的关系了。
- 不用在编写任何调度算法了。
线程的优点:
- 创建一个新线程的代价要比创建一个新进程小得多
- 与进程之间的切换相比,线程之间的切换需要操作系统做的工作要少很多
- 线程占用的资源要比进程少很多
- 能充分利用多处理器的可并行数量
- 在等待慢速I/O操作结束的同时,程序可执行其他的计算任务
- 计算密集型应用,为了能在多处理器系统上运行,将计算分解到多个线程中实现
- I/O密集型应用,为了提高性能,将I/O操作重叠。线程可以同时等待不同的I/O操作
线程的缺点:
性能损失:
一个很少被外部事件阻塞的计算密集型线程往往无法与共它线程共享同一个处理器。如果计算密集型线程的数量比可用的处理器多,那么可能会有较大的性能损失,这里的性能损失指的是增加了额外的同步和调度开销,而可用的资源不变。
健壮性降低:
编写多线程需要更全面更深入的考虑,在一个多线程程序里,因时间分配上的细微偏差或者因共享了不该共享的变量而造成不良影响的可能性是很大的,换句话说线程之间是缺乏保护的。
缺乏访问控制:
进程是访问控制的基本粒度,在一个线程中调用某些OS函数会对整个进程造成影响。
编程难度提高编写与调试一个多线程程序比单线程程序困难得多。一个进程内部一定存在多个执行流,问:这些执行流在CPU的角度有区别吗?
答案是没有任何区别,CPU调度的时候照样以task_struct为单位来进行调度,这里只是task_struct背后的代码和页表只是曾经的代码和页表的一小部分而已。所以CPU执行的只是一小块代码和数据,但并不妨碍CPU执行其它执行流。所以我们就可以把原本串行的所有代码而转变成并发或并行的让这些代码在同一时间点得以推进。总结如下:以前CPU看到的所有的task_struct都是一个进程,现在CPU看到的所有的task_struct都是一个执行流(线程)
Linux下进程再理解:
有了这些知识后,我们对线程的认识也发生了改变,之前的理解是:进程==操作系统所对应的代码和数据结构和进程本身所对应的代码和数据结构。
现在的理解:
现在的进程,站在内核角度上看就是:承担分配系统资源的基本实体(进程的基座属性)。所有进程最大的意义是向系统申请资源的基本单位。因此,所谓的进程并不是通过task_struct来衡量的,除了task_struct之外,一个进程还要有进程地址空间、文件、信号等等,合起来称之为一个进程。换言之,当我们创建进程时是创建一个task_struct、创建地址空间、维护页表,然后在物理内存当中开辟空间、构建映射,打开进程默认打开的相关文件、注册信号对应的处理方案等等。
所以,在Linux系统下,Linux是没有真正的线程的,只是通过将进程通过封装,模拟出的一个线程,所以在Linux下的PCB结构体中是小于等于其他平台的PCB的概念。
线程是操作系统调度的基本单位。
Linux下没有真正意义上的线程,那么也就绝对没有真正意义上的线程相关的系统调用。这很好理解,既然在Linux中都没有真正意义上的线程了,那么自然也没有真正意义上的线程相关的系统调用了。但是Linux可以提供创建轻量级进程的接口,也就是创建进程,共享空间。
2.进程控制
原生线程库pthread
在Linux系统中,是没有原生的线程库的,因此系统为用户层提供了原生线程库pthread。
pthread库:
- 原生线程库实际就是对轻量级进程的系统调用进行了封装,在用户层模拟实现了一套线程相关的接口。
- 因此对于我们来讲,在Linux下学习线程实际上就是学习在用户层模拟实现的这一套接口,而并非操作系统的接口。
下面来看下线程库提供的函数接口:
创建线程:pthread_creater()
#include <pthread.h> int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine) (void *), void *arg);参数:pthread_t 线程地址,attr用于创建现成的属性,通常为NULL,void* 为回调函数,为创建线程的实现方法,args为传给现成的参数。
返回值:成功返回0,失败返回error
注意:Linux不能真正意义上的帮我们提供线程的接口,但是Linux有原生线程库,使用此函数必须在编译时带上 -pthread 选项。
获取线程IP:pthread_self()
没有参数
返回值:成功返回线程地址,失败返回error.
线程等待:pthread_join()
#include <pthread.h> pthread_join(pthread_t thread,void** retval)参数:thread 线程id名,线程返回值,通常为空。
返回值:成功返回0,错误返回error
线程终止:pthread_exit()
#include <pthread.h> pthread_exit(void*retval);参数:返回值
返回值:成功退出当前线程,失败返回error
线程取消:pthread_cancel()
#include <pthread.h> pthread_cancel(pthread_t thread);参数:被取消线程id。
返回值:成功取消线程,返回值为0,错误返回error

![[sd_scripts]之train](https://img-blog.csdnimg.cn/553ef59b505f47ac9b6852a55893144f.png)