若该文为原创文章,转载请注明原文出处。
一. 部署概述
环境:Ubuntu20.04、python3.8
芯片:RK3568
芯片系统:buildroot
开发板:ATK-DLRK3568
开发主要参考文档:《Rockchip_Quick_Start_RKNN_Toolkit2_CN-1.4.0.pdf》、《Rockchip_User_Guide_RKNN_Toolkit2_CN-1.4.0.pdf》
二、yolov5模型训练
1、训练环境
训练是在云端训练的,平台AutoDL租了一台2080IT,配置如下:

2、环境搭建
1、创建conda环境
conda create -n rkyolov5 python=3.8 // 用于yolov5
conda create -n rknn2_env python=3.8 -y // 用于rknn22、激活conda环境
conda activate rkyolov5
conda deactivate // 退出环境3、安装pytoch
pip install torch==1.7.1+cu101 torchvision==0.8.2+cu101 torchaudio==0.7.2 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna.tsinghua.edu.cn/simple 4、下载yolov5-v6.0
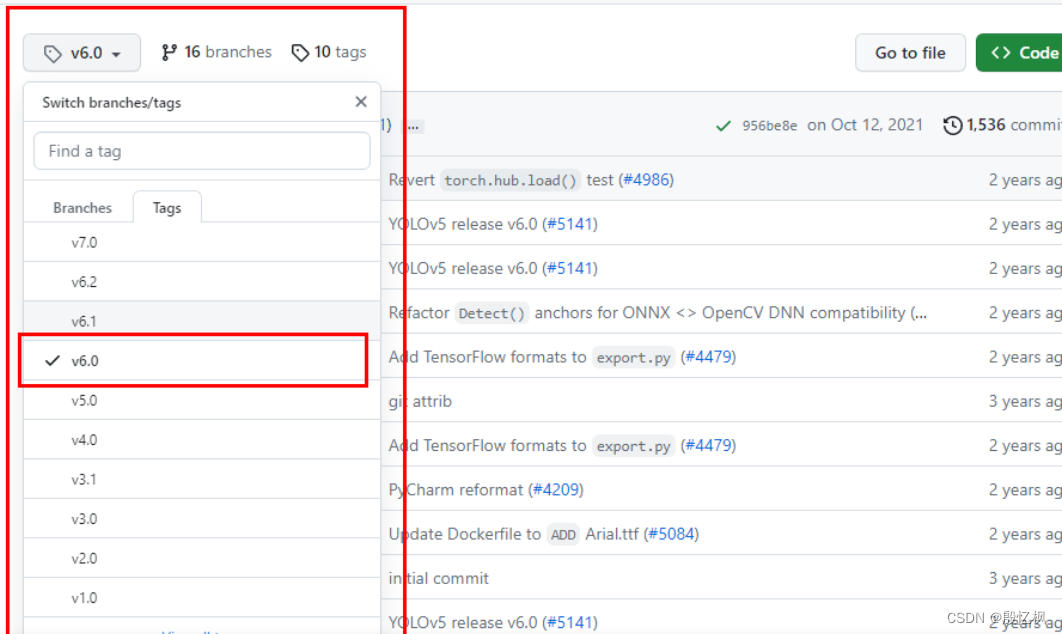
首先需要在官网下载yolov5-6.0的项目 我们打开yolov的官网,Tags选择6.0版本
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple5、训练
python train.py --img 640 --data coco128.yaml --cfg yolov5s.yaml --weights yolov5s.pt --epoch 300 --batch-size 16 --device 0出错:The aliases was originally deprecated in NumPy 1.20; for more details and guidance see the original release note at:
原因numpy版本问题
处理,重新安装
pip uninstall numpypip install numpy==1.22出错:AttributeError: module 'PIL.Image' has no attribute 'ANTIALIAS
ModuleNotFoundError: No module named 'PIL'
原因是pillow库版本不支持,降低版本
pip install pillow==9.5.06、pt转onnx
转换步骤:
修改models/yolo.py,修改class Detect(nn.Module):的forward函数
注意!!!仅在转换时修改,在训练时改回原状态!再训练时不要忘记哦!
# def forward(self, x):
# z = [] # inference output
# for i in range(self.nl):
# x[i] = self.m[i](x[i]) # conv
# bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
# x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
#
# if not self.training: # inference
# if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
# self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
#
# y = x[i].sigmoid()
# if self.inplace:
# y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
# y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
# xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
# wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
# y = torch.cat((xy, wh, y[..., 4:]), -1)
# z.append(y.view(bs, -1, self.no))
#
# return x if self.training else (torch.cat(z, 1), x)
def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # conv
return x修改export.py函数的--opset为12
运行export.py
python export.py --weights best.pt --img 640 --batch 1 --opset 12简化模型
python -m onnxsim weights/yolov5s.onnx weights/yolov5s-sim.onnx三、安装rknn-toolkit2
根据正点原子的教程安装,先安装工具链,在创建环境,在安装rknn-toolkit2,之后转换模型
下载地址:GitHub - rockchip-linux/rknn-toolkit2
1、创建一个新的环境
conda create rknn2_env python=3.8 -y2、安装
进入packages
pip install rknn_toolkit2-1.5.2+b642f30c-cp38-cp38-linux_x86_64.whl等待安装
把转换好的onnx 拷贝到 rknn-toolkit2-master/examples/onnx/yolov5目录下,
3、修改test.py文件
ONNX_MODEL = 'yolov5s_relu.onnx'
RKNN_MODEL = 'yolov5s_relu.rknn'4、运行
python test.py出错: ImportError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.29' not found (required by /root/miniconda3/envs/rknn2_env/lib/python3.8/site-packages/rknn/api/lib/linux-x86_64/cp38/librknnc.so)
原因:工具链没安装,安装后测试正常。


四、部署
通过测试,使用正点原子的yolov5例程测试结果不对,所以使用SDK里自带的rknpu2里的example
重新编译里面的例子,直接编译不编译不过,需要修改一下。

修改build-linux_RK356X.sh和CMakeLists.txt,把正点原子的libs拷贝过来重新编译
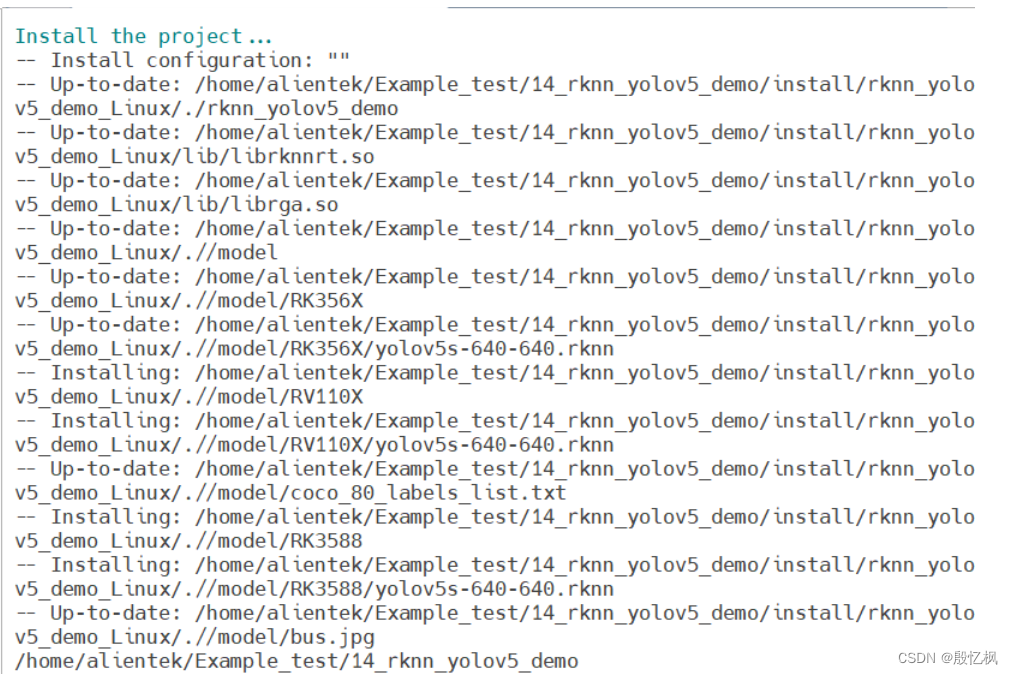
编译后的文件在install目录下,把rknn_yolov5_demo_Linux通过adb拷贝到开发板上。

打开开发板终端,运行: ./rknn_yolov5_demo model/RK356X/last.rknn model/zidane.jpg
生成的结果保存在当前目录下。
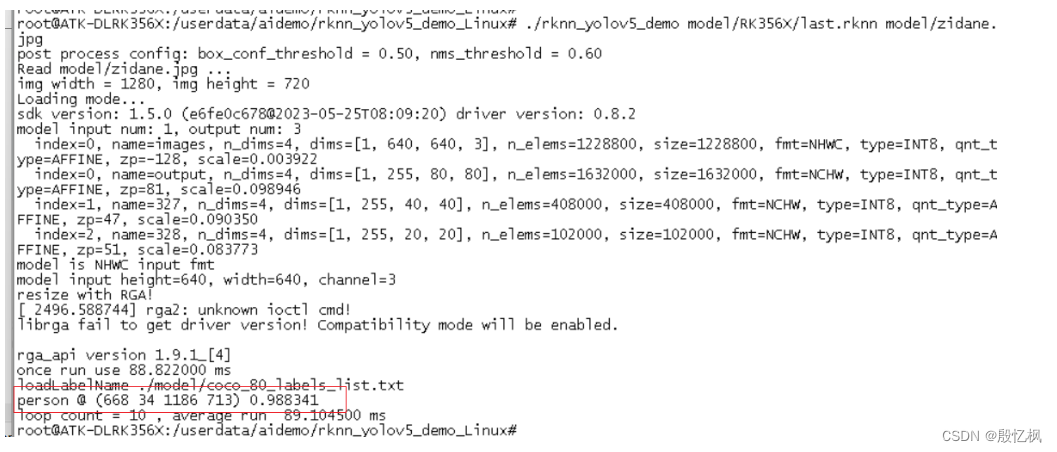
通过输出信息可以看来推理有出结果,结果也是对的,但只有一个,图片是有2个人.
程序应该还有地方要修改,等到改好后在开放代码。
如有侵权,或需要完整代码,请及时联系博主。