文章目录
- AVL树
- 1. AVL树的概念
- 2. AVL树节点的定义
- 3. AVL树的插入
- 4. AVL树的旋转
AVL树
1. AVL树的概念
二叉搜索树可以缩短查找的效率,但是如果数据接近有序二叉搜索树将会退化为单支,查找元素相当于在顺序表中搜索元素,效率低下。
当向二叉搜索树当中插入新节点后,保证每个节点的左右子树高度之差的绝对值不超过1(需要对树中的节点进行调整)即可降低树的高度,从而减少平均搜索长度
一棵AVL树或者空树:
- 它的左右子树都是AVL树
- 左右子树高度只差(简称平衡因子)的绝对值不超过1
如果一棵二叉搜索树的高度是平衡的,它就是AVL树。
平衡因子:左边高是-1, 右边高是1。左右高度相等则是0
2. AVL树节点的定义
template<class T>
struct AVLTreeNode {
public:explicit AVLTreeNode(const T& data): _left(nullptr), _right(nullptr), _parent(nullptr), _bf(0){}AVLTreeNode<T>* _left;AVLTreeNode<T>* _right;AVLTreeNode<T>* _parent;T _data;int _bf;
};
3. AVL树的插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树其实还是一棵二叉搜索树。AVL树的插入分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
cur 插入后,parent的平衡因子一定要调整,在插入之前parent的平衡因子分为三种情况:0, -1, 1。
分为以下两种情况:
- 如果cur插入到parent的左侧,parent的平衡因子-1
- 如果cur插入到parent的右侧,parent的平衡因子+1
这个时候parent的平衡因子分为三种情况:
- 如果parent的平衡因子是0, 说明插入之前的平衡因子是正负1 插入成功
- 如果parent的平衡因子是正负1, 说明插入之前是0, 插入后更新为正负1,此时以parent为根的树的高度增加,需要继续向上更新
- 如果parent的平衡因子为正负2 , 则parent的平衡因子违反了平衡树的性质,需要对其进行旋转
4. AVL树的旋转
根据节点位置的不同,AVL树的旋转分为四种:
- 新节点插入较高左子树的左侧:右单旋
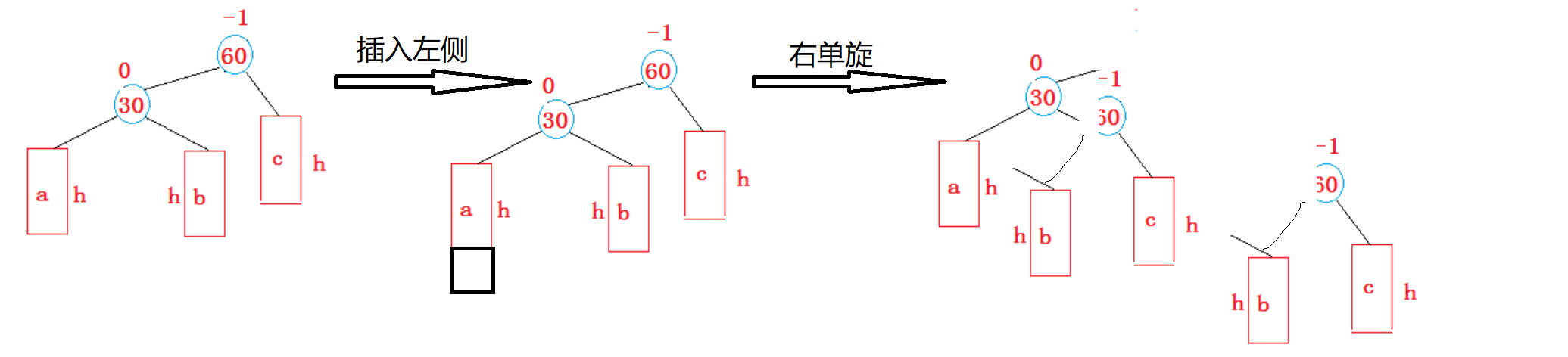
void rotateR(Node* parent) {Node* subL = parent->_left;Node* subLR = subL->_right;// 双亲的左为双亲左孩子的右孩子parent->_left = subLR;if (subLR) {subLR->_parent = parent;}subL->_right = parent;// 如果parent为子树Node* pParent = parent->_parent;parent->_parent = subL;subL->_parent = pParent;if (pParent == nullptr) {_root = subL;subL->_parent = nullptr;} else {// 如果parent是一个子树if (parent->_right == parent) {parent->_right = subL;} else {parent->_left = subL;}subL->_parent = pParent;}pParent->_bf = subL->_bf = 0;
}
- 新节点插入较高右子树的右侧:左单旋
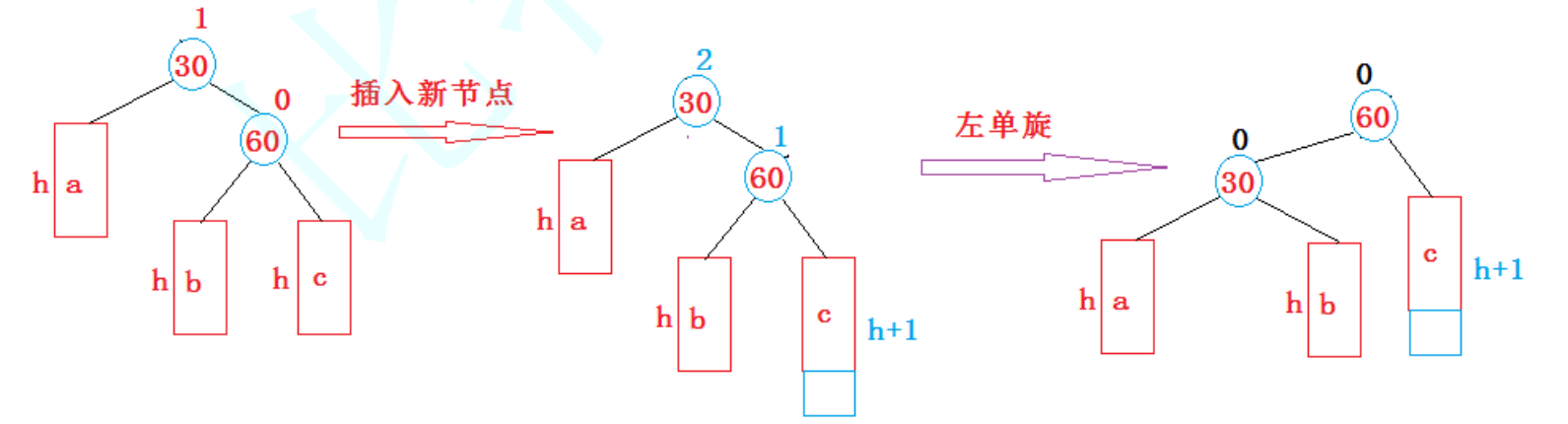
void rotateL(Node* parent) {Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) {subRL->_parent = parent;}subR->_left = parent;Node* pParent = parent->_parent;parent->_parent = subR;if (pParent == nullptr) {_root = subR;subR->_parent = nullptr;} else {if (pParent->_left == subR) {pParent->_left = subR;} else {pParent->_right = subR;}subR->_parent = pParent;}
}
- 新节点插入较高左子树的右侧:先左单旋再右单旋

void rotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;subLR->_bf = 0;subL->_bf = -1;}else if (bf == -1){parent->_bf = 1;subLR->_bf = 0;subL->_bf = 0;}else if (bf == 0){parent->_bf = 0;subLR->_bf = 0;subL->_bf = 0;}else{assert(false);}
}
左单旋是指将一个节点的右子树提升为根节点,同时将原根节点降为左子树的右子节点。右单旋则是将一个节点的左子树提升为根节点,同时将原根节点降为右子树的左子节点。
判断应该使用左单旋还是右单旋,需要根据具体的情况来确定。一般来说,当某个节点的左子树高度大于右子树高度时,需要进行右单旋;当某个节点的右子树高度大于左子树高度时,需要进行左单旋。这是因为旋转操作可以通过改变树的结构来使得树重新平衡,使得左右子树的高度差保持在可接受的范围内。
- 新节点插入较高右子树的左侧:先右单旋再左单旋
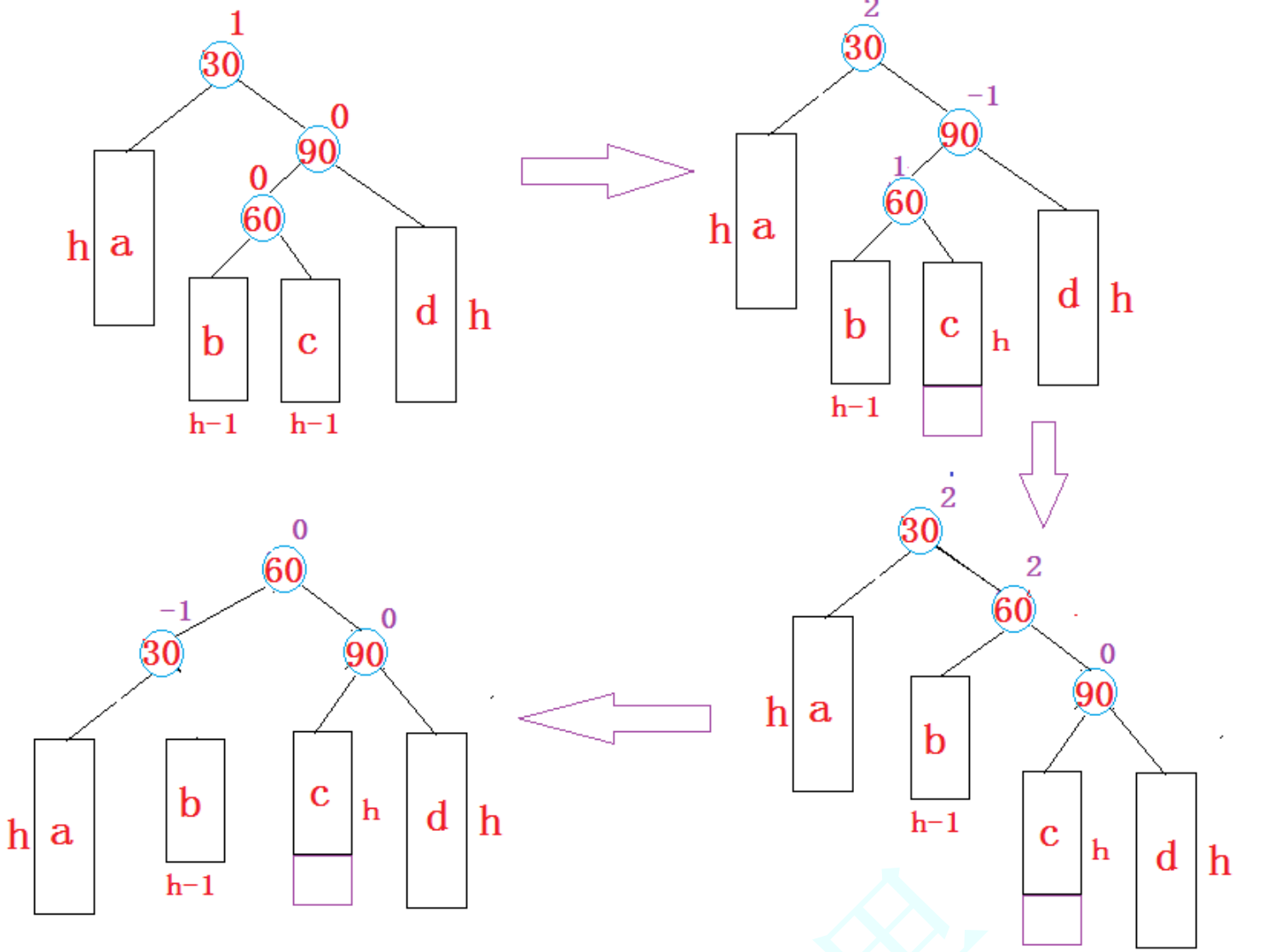
void rotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){subR->_bf = 0;parent->_bf = -1;subRL->_bf = 0;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;subRL->_bf = 0;}else if (bf == 0){subR->_bf = 0;parent->_bf = 0;subRL->_bf = 0;}else{assert(false);}
}


![常用数据分类算法原理介绍、优缺点分析与代码实现[LR/RF/DT/SVM/NavieBayes/GBDT/XGBoost/DNN/LightGBM等]](https://img-blog.csdnimg.cn/img_convert/efaea374885bff814a48b6cd39b6ac8e.png)

![关于SpringBoot、Nginx 请求参数包含 [] 特殊符号 返回400状态](https://img-blog.csdnimg.cn/7efd894b6f054017a7d2c48b475f4d51.png)