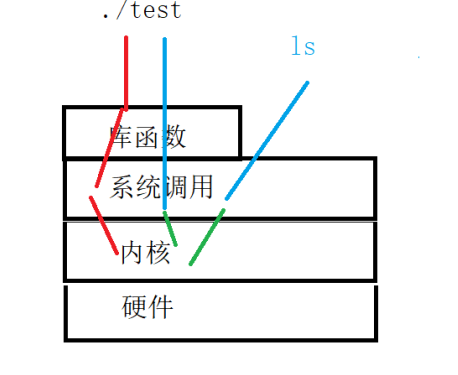
简单分层
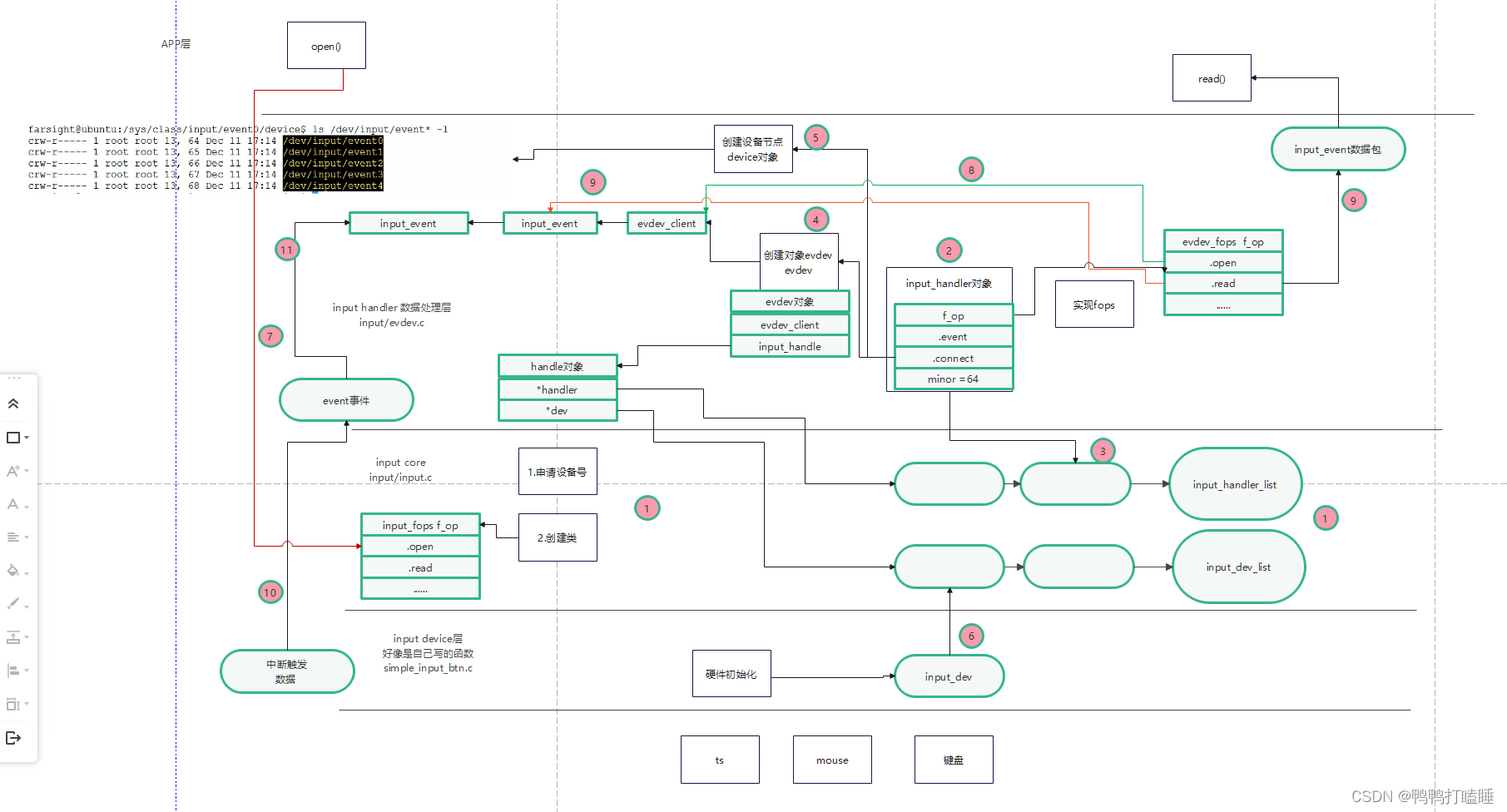
应用层
内核层
---------------------------
input handler 数据处理层 driver/input/evdev.c1.和用户空间交互,实现fops2.不知道数据怎么得到的,但是可以把数据上传给用户---------------------------
input core层1.维护上面和下面的两个链表2.为上下两层提供接口----------------------------
input device层---driver/input/input.c1.初始化硬件,获取硬件数据2.知道数据是什么样,不知道如何把数据给用户
具体
第一步
注册顺序最开始应该是 input_coer层,锁定函数 input/input.c
核心层,得创建链表把,图中的两个链表,方便进行匹配
class_register() //注册这个输入子系统类,同时这个类的主设备号都分配为13
同时这里两个链表
第一个是 input_handler_list 存放结构体 input_handler 可以理解是对这个输入dev的操作实例或方案
第二个是 input_dev_list 这么多输入设备,需要放进来和第一个链表进行匹配
1.input_coer应该是第一个核心层,得创建链表把,看看input_.c文件 !!!! 这里为啥跑到input.c了
同时input.c中还注册了主设备号为13的类和fopsinput_init(void)class_register(&input_class);err = input_proc_init();//感觉像bus总线的新玩法,注册bus总线上的input子系统proc_bus_input_dir = proc_mkdir("bus/input", NULL);entry = proc_create("devices", 0, proc_bus_input_dir,&input_devices_fileops);//应该是bus总线里面的注册device文件夹static const struct file_operations input_devices_fileops = { //对这个文件夹里面的文件增加fops.owner = THIS_MODULE,.open = input_proc_devices_open,.poll = input_proc_devices_poll,.read = seq_read,.llseek = seq_lseek,.release = seq_release,};entry = proc_create("handlers", 0, proc_bus_input_dir,&input_handlers_fileops);//应该是bus总线里面的注册handlers文件夹err = register_chrdev_region(MKDEV(INPUT_MAJOR, 0),INPUT_MAX_CHAR_DEVICES, "input");//这里的主设备号是13
static LIST_HEAD(input_dev_list); //全局static 初始化链表
static LIST_HEAD(input_handler_list);//全局static 初始化链表
第二步
input handler 数据处理层
input/evdev.c
为了构建input_handler 先看看handler结构体里面有些什么
里面有主次设备号,还有fops操作参数,看起来就是能创建设备节点的 这里的主设备号次设备号还是64
那就是/dev/input/event 开始的设备号
//如果看struct input_handler 有下面这些成员 和/dev/input/event 13 64 里面次设备一致
struct input_handler(void (*event)(struct input_handle *handle, unsigned int type, unsigned int code, int value);file_operation *fops = evdev_opsint minor; =EVDEV_MINOR_BASE 64.connect = evdev_connect,.event = evdev_event,}
上面构造号后 就注册到 input_hadle_list 链表中 这里看图就不太对了 不是在中间层注册到嘛
input_handler层中 叫数据处理者 注册进core层的链表 就是看看哪些数据能被处理假如上面的handler和下面的input_dev匹配成功 就直接调用 handler中的connect()方法
connect()方法会做以下事情,1 创建设备节点 如/dev/event0 主次设备编号13 64
2 创建创建input_dev对象 1.input_dev里面有event clinet(描述的缓冲区对象) 这个缓冲区是个队列 每个队列都是struct input_dev结构体2.input_dev里面有handle 对象 里面放了handler指针和dev指针 我也画了图了 所以说 evdev对象就能有handle 就能找到input_dev* 和event_hadle*connect完就等下一层上报数据了
好开始读代码 一步一步来
static int __init evdev_init(void) //驱动程序的函数,自动注册return input_register_handler(&evdev_handler);//注册了一个 evdev_handler结构体static struct input_handler evdev_handler = {.event = evdev_event,.events = evdev_events,.connect = evdev_connect,第三步
input_coer层
上面第二步调用了input_register_handler()函数
这个函数其实在 input_coer层 为了把上面的 evdev_handler 注册进链表
struct input_dev *dev;
input_register_handler(struct input_handler *handler) //就是我们的handlerlist_for_each_entry(dev, &input_dev_list, node) input_attach_handler(dev, handler);//遍历链表,就是把core层两个链表进行匹配id = input_match_device(handler, dev);//根据id进行匹配error = handler->connect(handler, dev, id); //这里调用了 handler的connect函数
第四步
input handler 数据处理层
input/evdev.c
匹配成功后,注册进入链表的 evdev_handler结构体的.connect函数被调用
好的又回去 input handler 层了
重点看图中 这里调用了connect函数后
1.生成了 对象 evdev
2.创建设备节点 /dev/input/event0
先说第一点生成了 对象 evdev
生成了 对象 evdev
这个evdev对象 里面会有两个对象 evdedv_client 和 input_handle 注意这个地方是handle
input_handler evdev_handler.connect = evdev_connect,
evdev_connect(struct input_handler *handler, struct input_dev *dev,const struct input_device_id *id)evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL);//初始化evdev结构体INIT_LIST_HEAD(&evdev->client_list); //初始化里面的client_list ,也就是后面说的bufinit_waitqueue_head(&evdev->wait); //初始化里面的等待队列//下面是初始化evdev的handle 也就是用 handle 连接了handler层和input device层evdev->handle.dev = input_get_device(dev);evdev->handle.name = dev_name(&evdev->dev);evdev->handle.handler = handler; //handle的作用是能指向handlerevdev->handle.private = evdev; //handle的作用是能指向evdev//注册这个handleinput_register_handle(&evdev->handle);第五步
input handler 数据处理层
input/evdev.c
上面的connect的第二点还没说完
2.创建设备节点 /dev/input/event0
input_handler evdev_handler.connect = evdev_connect,
evdev_connect(struct input_handler *handler, struct input_dev *dev,const struct input_device_id *id)minor = input_get_new_minor(EVDEV_MINOR_BASE, EVDEV_MINORS, true);//查找次设备号看哪个能用//注意这里的dev是device 就是字符设备哪个device//创建设备节点,之前我们都是用device_create(),其实就是做了下面的事情dev_set_name(&evdev->dev, "event%d", dev_no);evdev->dev.devt = MKDEV(INPUT_MAJOR, minor);//这里主设备号13 次设备号从65开始evdev->dev.class = &input_class;evdev->dev.parent = &dev->dev;evdev->dev.release = evdev_free;device_initialize(&evdev->dev);device_add(&evdev->dev)cdev_init(&evdev->cdev, &evdev_fops); //cdev的fops在这里cdev_device_add(&evdev->cdev, &evdev->dev);
note:以前用device_create()创建设备节点
device *device_create(struct class *class, struct device *parent,dev_t devt, void *drvdata, const char *fmt, ...)//这个函数要的参数上面竟然都有device_create_vargs(class, parent, devt, drvdata, fmt, vargs);device_initialize(dev);dev = kzalloc(sizeof(*dev), GFP_KERNEL);dev->devt = devt;dev->class = class;dev->parent = parent;dev->groups = groups;dev->release = device_create_release;device_add(dev);//所以知道了 上面就是在创建设备节点
做完那不就/dev/input/event0 就出来了
第六步
device层
注册自己写的函数
module_init(simple_btn_input_init);
static int __init simple_btn_input_init(void)//a, 分配一个input device对象btn_input = input_allocate_device();//b, 初始化input device对象//该设备能够产生哪种数据类型---EV_KEY表示产生按键数据btn_input->evbit[0] |= BIT_MASK(EV_KEY);//能够产生哪个按键---比如能够产生下键 KEY_DOWN, KEY_ESC// btn_input->keybit[108/32] |= 1<<(108%32);btn_input->keybit[BIT_WORD(KEY_DOWN)] |= BIT_MASK(KEY_DOWN);//c, 注册input device对象ret = input_register_device(btn_input);//这个函数里面最后也是调用了handler->connect(handler, dev, id);//匹配成功就是handle的connect方法,也就是 evdev_connect()
note: 可能这里要问了,有没有和palntfrom一样的匹配规则呢 啥设备树匹配 name匹配的
我们看到handler层的注册的结构体 input_handler evdev_handler
evdev_handler.id_table =evdev_ids
static const struct input_device_id evdev_ids[] = {
{ .driver_info = 1 }, /* Matches all devices / //这里的意思是匹配所有设备,来了就匹配,我不要规则
{ }, / Terminating zero entry */
};
那为啥还有个idtable 拿来匹配呢
是因为我们用的是公共驱动,所有都匹配 但是有其他的handler驱动,需要用支持哪些输入事件和键值对 来看是否能匹配这个设备了
举个例子在input_hadler这一层 我们看的是evdev.c这个万能驱动 起始还有mousedevhandler mousedev.c鼠标handler 和joydey_handle游戏杆的handler
所以鼠标设备会和 evdev.c匹配 也会和鼠标handler匹配 所以鼠标插入的时候 有个/dev/input/event0 和 /dev/input/mouse0
起始两个是同一个设备 所以用哪个都可以
第7步
应用程序调用open()
到vfsopen 根据设备号找到cdev
到驱动的open函数
我们之前是在core层 申请的设备号 所以找到了 input.c的代码 这个地方也要回顾为啥是到这里!!!
因为这里又register_chrdev_region()
err = register_chrdev_region(MKDEV(INPUT_MAJOR, 0),
INPUT_MAX_CHAR_DEVICES, “input”);
在input_open函数中 找到input_hadle 那么也能找到input_hadler层的fops
register_chrdev(Input_major,“input”,&input_fops)
input_fops.open()
new_fops = fops_get(hadler->fops)
//把文件节点的fop全改成了 handler层的fop了
file_fop = new_file
第八步
input handler 数据处理层
input/evdev.c
上一步找到了 input handler的open()
//当时的fop是这样注册的evdev_connect() //造connect注册了fopcdev_init(&evdev->cdev, &evdev_fops);evdev_fops.open = evdev_open() //open函数这里 初始化client struct evdev_client *client;client = kzalloc(size, GFP_KERNEL | __GFP_NOWARN);client->bufsize = bufsize;client->evdev = evdev;evdev_attach_client(evdev, client);//把文件节点的fop全改成了 handler层的fop了file_fop = new_file //使用file节点私有空间传输数据,那read,write都能拿到了clientevdev_open_device() //查看第三层 input_dev xx层有没有open函数,有的话继续调用 但这里没有
第九步
app开始read
vfs_erad
到evdev.c 开始进行evdev_read 也就是调用到evdev_read()
从之前的client中 拿取最新的上报数据 返回给用户层
evdev_read()evdev_client *client = file->private_data;//从fd文件的私有属性拿到clientevdev *evdev = client->evdev; //从clinet拿到evdevstruct input_event event;//构造一个要返换给用户空间的结构体 input_eventif (client->packet_head == client->tail &&(file->f_flags & O_NONBLOCK))//如果当前用非阻塞的方式,还没有数据,那应该马上返回return -EAGAIN;if (!(file->f_flags & O_NONBLOCK)) //正常的阻塞形式error = wait_event_interruptible(evdev->wait,client->packet_head != client->tail ||!evdev->exist || client->revoked);//这个进程丢进等待队列把,等中断唤醒继续往下走//下面是有中断了,阻塞解除,进程继续往下走//下面的进行用户空间数据发送while()evdev_fetch_next_event(client, &event)*event = client->buffer[client->tail++];//这里构造input_event,也就是从client里面拿一个bufferinput_event_to_user(buffer + read, &event)copy_to_user(buffer, event, sizeof(struct input_event)//拿了buffer后给到用户空间
第十步
那么中断是谁发起的
就到了我们写的程序 input_device 层
//按下
input_event(btn_input, EV_KEY, KEY_DOWN, 1);
input_sync(btn_input); //我们的中断函数执行上报数据INPUT.C //跑到中间层进行数据封装input_handle_event(struct input_dev *dev,unsigned int type, unsigned int code, int value)input_pass_values(dev, dev->vals, dev->num_vals);struct input_handle *handle; struct input_value *v;handle = rcu_dereference(dev->grab);//从dev中拿到handlelist_for_each_entry_rcu(handle, &dev->h_list, d_node)//这个也是想办法拿到handlehandle_event(handle,type,code,value)第十一步
input handler 数据处理层
input/evdev.c
调用到 input_handler evdev_handler->event = evdev_eventstruct evdev *evdev = handle->private; //通过private找到evdevstruct evdev_client *client;list_for_each_entry_rcu(client, &evdev->client_list, node)//也找到clinet