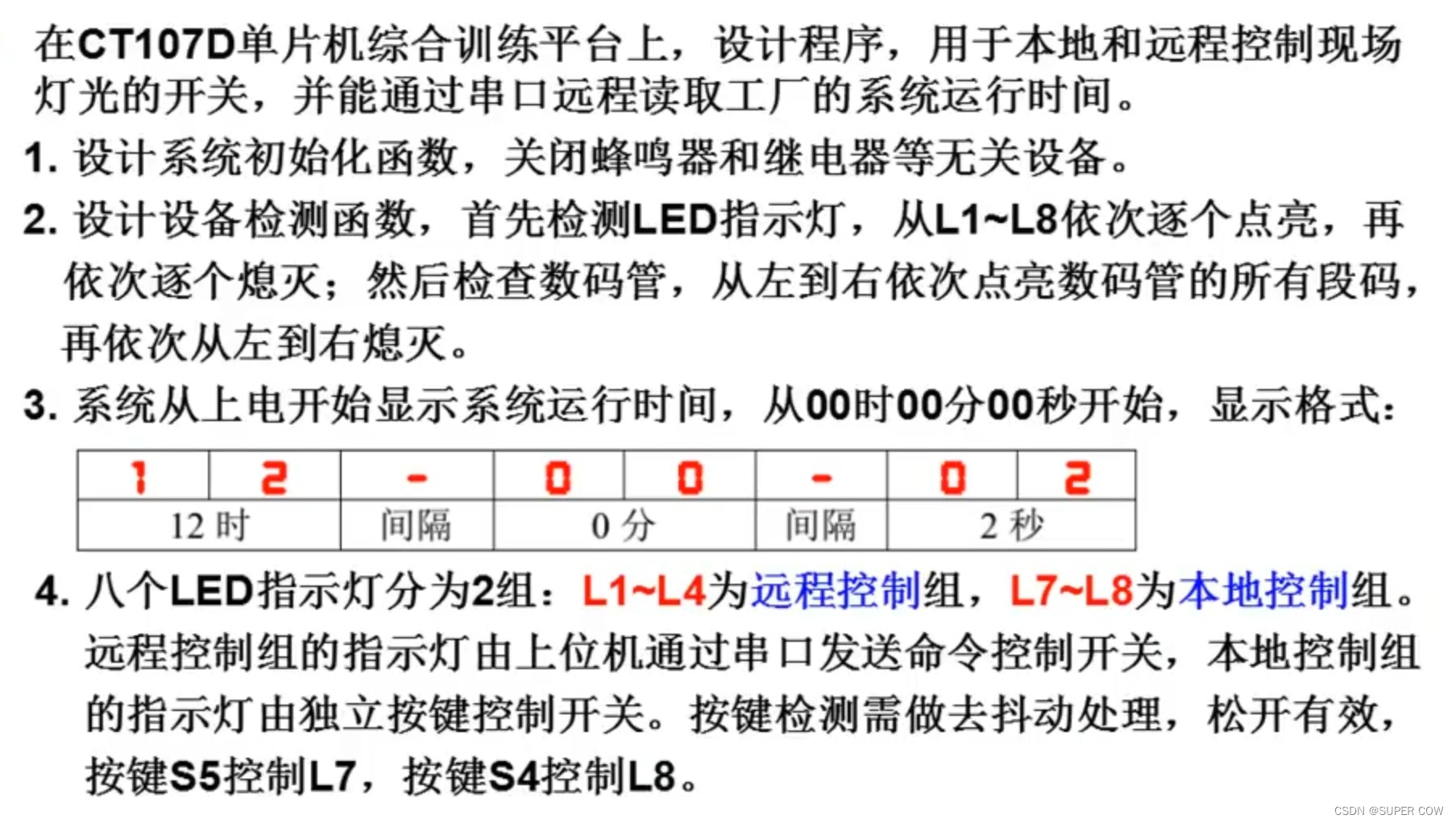
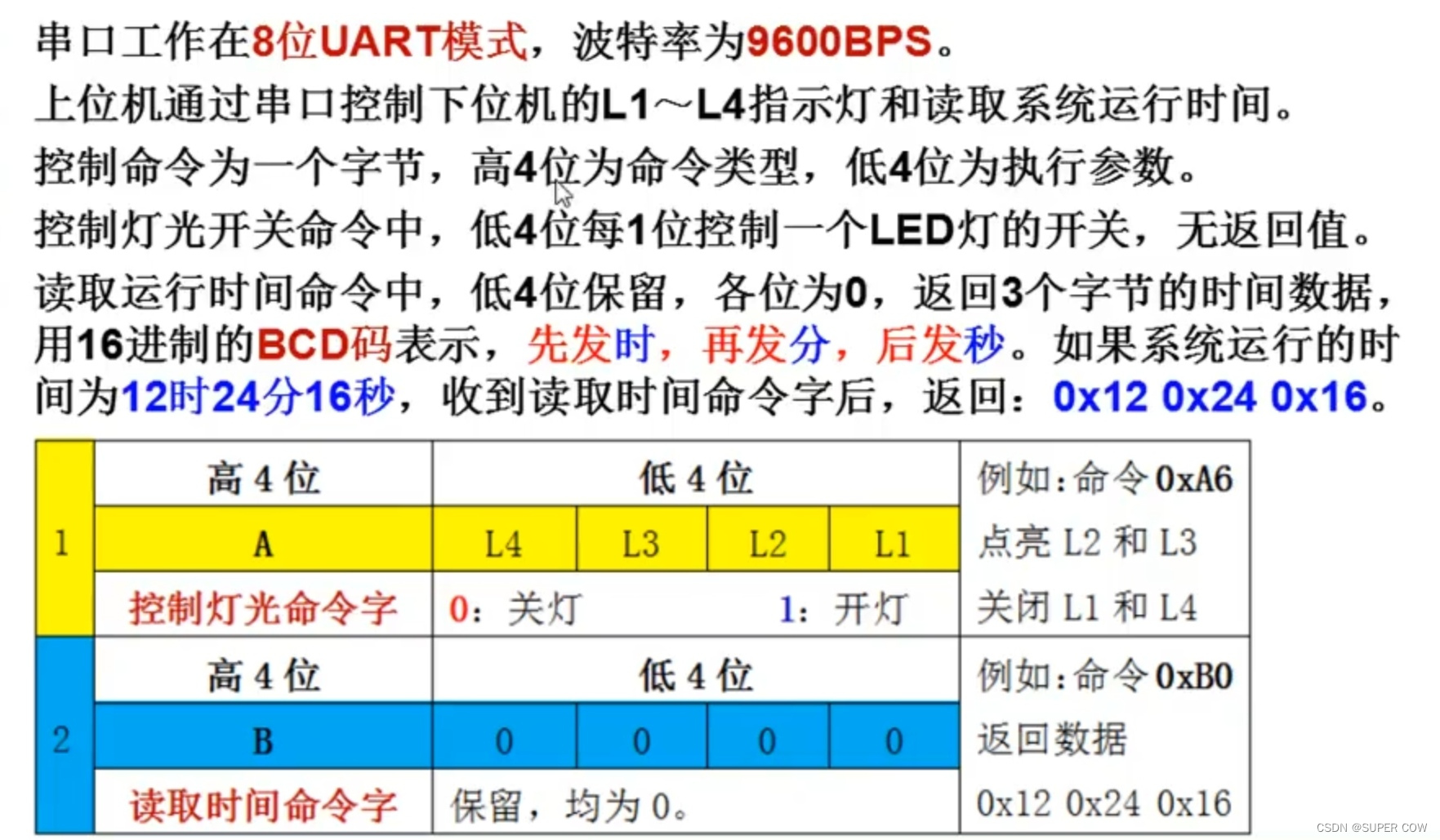
一、题目
二、代码
#include <reg52.h>sfr AUXR = 0x8e; //定义辅助寄存器sbit S5 = P3^2; //定义S5按键引脚
sbit S4 = P3^3; //定义S4按键引脚unsigned char led_stat = 0xff; //定义LED当前状态
unsigned char count = 0; //定义50ms定时中断累计变量
unsigned char t_h = 0; //定义运行时间的时变量
unsigned char t_m = 0; //定义运行时间的分变量
unsigned char t_s = 0; //定义运行时间的秒变量
unsigned char command = 0; //定义串口命令字接受变量//========共阳极数码管的段码表============
unsigned char code SMG_duanma[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
//=======================================//============锁存器选择函数==============
/** * @brief 选择要打通的锁存器* @param channel——要选择的通道* @retval 无**/
void SelectHC573(unsigned char channel)
{switch(channel){case 4:P2 = (P2 & 0x1f) | 0x80;break;case 5:P2 = (P2 & 0x1f) | 0xa0;break;case 6:P2 = (P2 & 0x1f) | 0xc0;break;case 7:P2 = (P2 & 0x1f) | 0xe0;break;case 0:P2 = (P2 & 0x1f) | 0x00;break;}
}
//=======================================//=================延时函数==============
/** * @brief 延时* @param t--延时长度* @retval 无**/
void Delay(unsigned int t)
{while(t--);
}
//=======================================//===========系统初始化函数==============
/** * @brief 将蜂鸣器、继电器等无关设备关闭* @param 无* @retval 无**/
void InitSystem()
{SelectHC573(5);P0 = 0x00;SelectHC573(4);P0 = led_stat;SelectHC573(0);
}
//=======================================//===========设备检测函数================
/** * @brief 逐个检测工厂灯光的工作状态* @param 无* @retval 无**/
void CheckLED()
{unsigned int i;SelectHC573(4);for(i = 0;i < 8; i++){led_stat = 0xfe << i;P0 = led_stat;Delay(60000);Delay(60000);}for(i = 0;i < 8; i++){led_stat = ~(0xfe << i);P0 = led_stat;Delay(60000);Delay(60000);}
}/** * @brief 逐个检测数码管的工作状态* @param 无* @retval 无**/
void CheckSMG()
{unsigned int i;for(i = 0;i < 8; i++){ SelectHC573(6);P0 = ~(0xfe << i);SelectHC573(7);P0 = 0x00;Delay(60000);Delay(60000);}for(i = 0;i < 8; i++){SelectHC573(6);P0 = 0xfe << i;SelectHC573(7);P0 = 0x00;Delay(60000);Delay(60000);}SelectHC573(0);
}
//=======================================//=========数码管显示函数================
/** * @brief 在数码管指定位置上显示指定内容* @param pos——数码管选位value——数码管显示内容* @retval 无**/
void DisplaySMG(unsigned char pos,unsigned char value)
{P0 = 0xff;SelectHC573(6);P0 = 0x01 << pos;SelectHC573(7);P0 = value;
}/** * @brief 在数码管上显示系统运行时间* @param 无* @retval 无**/
void DisplayTime()
{DisplaySMG(7,SMG_duanma[t_s % 10]); //秒的个位Delay(500);DisplaySMG(6,SMG_duanma[t_s / 10]); //秒的十位Delay(500);DisplaySMG(5,SMG_duanma[16]); //分隔符Delay(500);DisplaySMG(4,SMG_duanma[t_m % 10]); //分的个位Delay(500);DisplaySMG(3,SMG_duanma[t_m / 10]); //分的十位Delay(500);DisplaySMG(2,SMG_duanma[16]); //分隔符Delay(500);DisplaySMG(1,SMG_duanma[t_h % 10]); //时的个位Delay(500);DisplaySMG(0,SMG_duanma[t_h / 10]); //时的十位Delay(500);
}
//=======================================//===========定时器函数==================
/** * @brief 将定时器T0设置为16位模式,计数初值为50ms* @param 无* @retval 无**/
void InitTimer0()
{TMOD = 0x21; //T0和T1定时器工作模式同时赋值TH0 = (65535 - 50000) / 256;TL0 = (65535 - 50000) % 256;ET0 = 1; //使能定时器T0EA = 1; //使能总中断TR0 = 1; //启动定时器T0
}/** * @brief 进行系统运行时间的处理* @param 无* @retval 无**/
void Timer0() interrupt 1
{TH0 = (65535 - 50000) / 256;TL0 = (65535 - 50000) % 256;count ++;if(count == 20){count = 0;t_s ++;}if(t_s == 60){t_s = 0;t_m ++;if(t_m == 60){t_m = 0;t_h++;}}
}
//=======================================//==============串口函数=================
/** * @brief 将串口初始化为模式一,波特率为9600,允许接收* @param 无* @retval 无**/
void InitUart()
{TMOD = 0x21; //T0和T1定时器工作模式同时赋值TH1 = 0xfd; //设置9600波特率的参数TL1 = 0xfd;TR1 = 1; //启动定时器T1SCON = 0x50; //8为UART模式,允许接收AUXR = 0x00; //辅助寄存器设置ES = 1; //使能串口中断EA = 1; //使能总中断
}/** * @brief 接收上位机的数据并保存在command变量中* @param 无* @retval 无**/
void Uart() interrupt 4
{if(RI == 1){command = SBUF; //将接收到的数据保存到command中RI = 0; //接收完成后,将接收标志位RI清0}
}/** * @brief 串口给上位机发送一个字节* @param dat——串口发送的内容* @retval 无**/
void SendByte(unsigned char dat)
{SBUF = dat; //把dat中的内容发送给上位机while(TI == 0);TI = 0; //发送完成后,将发送标志位RI清0
}
//=======================================//========上位机命令解析执行函数=========
/** * @brief 接收上位机的数据并保存在command变量中* @param 无* @retval 无**/
void ExecuteCommand()
{if(command != 0x00) //接收到上位机命令{switch(command & 0xf0) //将命令类型取出来{case 0xa0: //远程控制灯光SelectHC573(4);led_stat = (led_stat | 0x0f) & (~command | 0xf0);P0 = led_stat;SelectHC573(0);command = 0x00;break;case 0xb0: //读取现场系统运行时间SendByte((t_h / 10 << 4) | (t_h % 10));SendByte((t_m / 10 << 4) | (t_m % 10));SendByte((t_s / 10 << 4) | (t_s % 10));command = 0x00;break;}}
}
//=======================================//==========按键扫描函数=================
/** * @brief 扫描S4与S5按键并执行现场灯光控制* @param 无* @retval 无**/
void ScanKeys()
{if(S4 == 0){Delay(500); //按键消抖if(S4 == 0) //确认按键按下{while(S4 == 0) //等待按键松开{DisplayTime();}SelectHC573(4);led_stat = (led_stat | 0x80) & (~led_stat | 0x7f); P0 = led_stat; //执行现场灯光控制SelectHC573(0);}}if(S5 == 0){Delay(500); //按键消抖if(S5 == 0) //确认按键按下{while(S5 == 0) //等待按键松开{DisplayTime();}SelectHC573(4);led_stat = (led_stat | 0x40) & (~led_stat | 0xbf); P0 = led_stat; //执行现场灯光控制SelectHC573(0);}}
}
//=======================================//===============主函数==================
void main()
{InitSystem();CheckLED();CheckSMG();InitTimer0();InitUart();while(1){ExecuteCommand();DisplayTime();ScanKeys();}
}
//=======================================


![NSS [鹤城杯 2021]Middle magic](https://img-blog.csdnimg.cn/img_convert/1758e956d5cf7ded0ee79923468703da.png)