51单片机PWM控制LED灯渐明渐暗实验
1.概述
这篇文章介绍单片机的PWM通过占空比控制LED灯的渐明渐暗效果,通过该实验掌握PWM的原理以及应用它做一些事情。
2.操作步骤
2.1.硬件电路
1.硬件准备
| 名称 | 型号 | 数量 |
|---|---|---|
| 单片机 | STC12C2052 | 1 |
| LED彩灯 | 无 | 2 |
| 晶振 | 12MHZ | 1 |
| 电容 | 30pf | 2 |
| 电阻 | 100欧姆 | 2 |
| 面包板 | 无 | 1 |
| 连接线 | 无 | 5 |
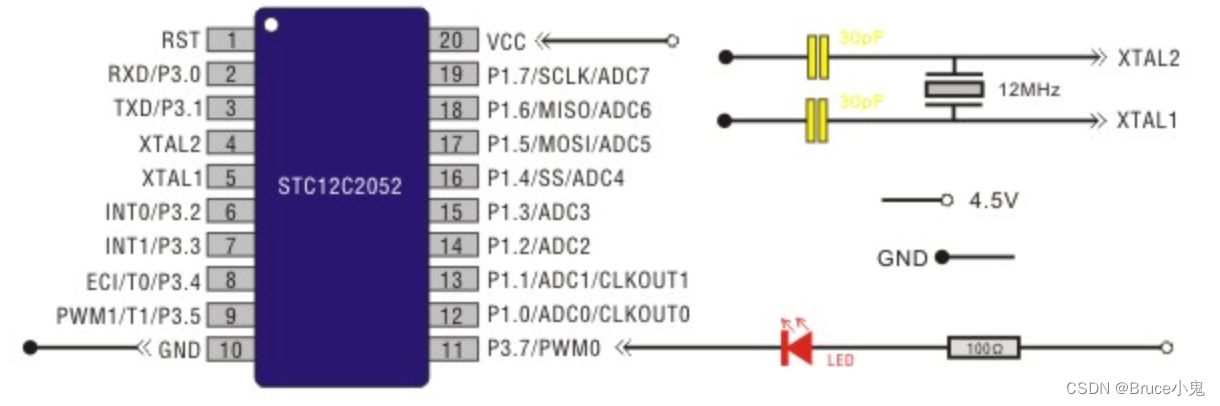
2.电路图原理图
这次实验使用了两个LED灯交替闪烁,因此按照11号引脚接LED灯的方式在9号引脚同样接入另一个LED灯即可。
2.2.程序代码
/*************************************************************
* 程序名: PWM控制两个LED灯亮度渐亮渐暗
* 编写人: bruce
* 硬件支持:TC12C2052 外部12MHZ晶振
* 日 期: 2023-11-14
* 修改日志: 通过控制PWM占空比调控LED灯亮和灭实现亮度渐变效果
/*************************************************************/#include<STC12C2052AD.H>/*********************************************************************************************
函数名:PWM初始化函数
调 用:PWM_init();
参 数:无
返回值:无
结 果:将PCA初始化为PWM模式,初始占空比为0
备 注:需要更多路PWM输出直接插入CCAPnH和CCAPnL即可
/**********************************************************************************************/
void PWM_init (void){CMOD=0x02; //设置PCA定时器CL=0x00; CH=0x00;CCAPM0=0x42; //PWM0设置PCA工作方式为PWM方式(0100 0010)CCAP0L=0x00; //设置PWM0初始值与CCAP0H相同CCAP0H=0x00; // PWM0初始时为0CCAPM1=0x42; //PWM1设置PCA工作方式为PWM方式(使用时删除//)CCAP1L=0x00; //设置PWM1初始值与CCAP0H相同CCAP1H=0x00; // PWM1初始时为0//CCAPM2=0x42; //PWM2设置PCA工作方式为PWM方式//CCAP2L=0x00; //设置PWM2初始值与CCAP0H相同//CCAP2H=0x00; // PWM2初始时为0//CCAPM3=0x42; //PWM3设置PCA工作方式为PWM方式//CCAP3L=0x00; //设置PWM3初始值与CCAP0H相同//CCAP3H=0x00; // PWM3初始时为0CR=1; //启动PCA定时器
}/*********************************************************************************************
函数名:PWM0占空比设置函数
调 用:PWM0_set();
参 数:0x00~0xFF(亦可用0~255)
返回值:无
结 果:设置PWM模式占空比,为0时全部高电平,为1时全部低电平
备 注:如果需要PWM1的设置函数,只要把CCAP0L和CCAP0H中的0改为1即可
/**********************************************************************************************/
void PWM0_set(unsigned char a){CCAP0L=a;CCAP0H=a;
}/*********************************************************************************************
函数名:PWM1占空比设置函数
调 用:PWM1_set();
参 数:0x00~0xFF(亦可用0~255)
返回值:无
结 果:设置PWM模式占空比,为0时全部高电平,为1时全部低电平
/**********************************************************************************************/
void PWM1_set(unsigned char a){CCAP1L=a;CCAP1H=a;
}/*********************************************************************************************
函数名:毫秒级CPU延时函数
调 用:DELAY_MS (?);
参 数:1~65535(参数不可为0)
返回值:无
结 果:占用CPU方式延时与参数数值相同的毫秒时间
备 注:应用于1T单片机时i<600,应用于12T单片机时i<125
/*********************************************************************************************/
void DELAY_MS (unsigned int a){unsigned int i;while( --a != 0){for(i = 0; i < 600; i++);}
}void main(void){//PWM初始化PWM_init();while(1){unsigned char a;for(a=0x00;a<0xff;a++){//设置PWM0占空比PWM0_set(a);//设置PWM1占空比PWM1_set(~a);DELAY_MS(8);}for(a=0xff;a>0x00;a--){//设置PWM0占空比PWM0_set(a);//设置PWM1占空比PWM1_set(~a);DELAY_MS(8);}}}
2.3.烧录程序
使用Keil工具编译程序,打开STC-ISP软件选择编译后的hex文件,设置外部晶振,下载程序。将程序烧录到单片机后,在给单片机冷启动(断掉5V电源在上电)使单片机切换为外部晶振,观察两个LED灯交替明暗变化。




![2023年中国雷达设备市场规模及市场份额分析[图]](https://img-blog.csdnimg.cn/img_convert/ef3fab07912be5e3ab6f0cfc7b45af9d.png)