std::vector<Eigen::Vector2d> centroids_unknown_motion_underk;
std::vector<Eigen::Vector2d> centroids_unknown_motion_k;
// 进行数字填充
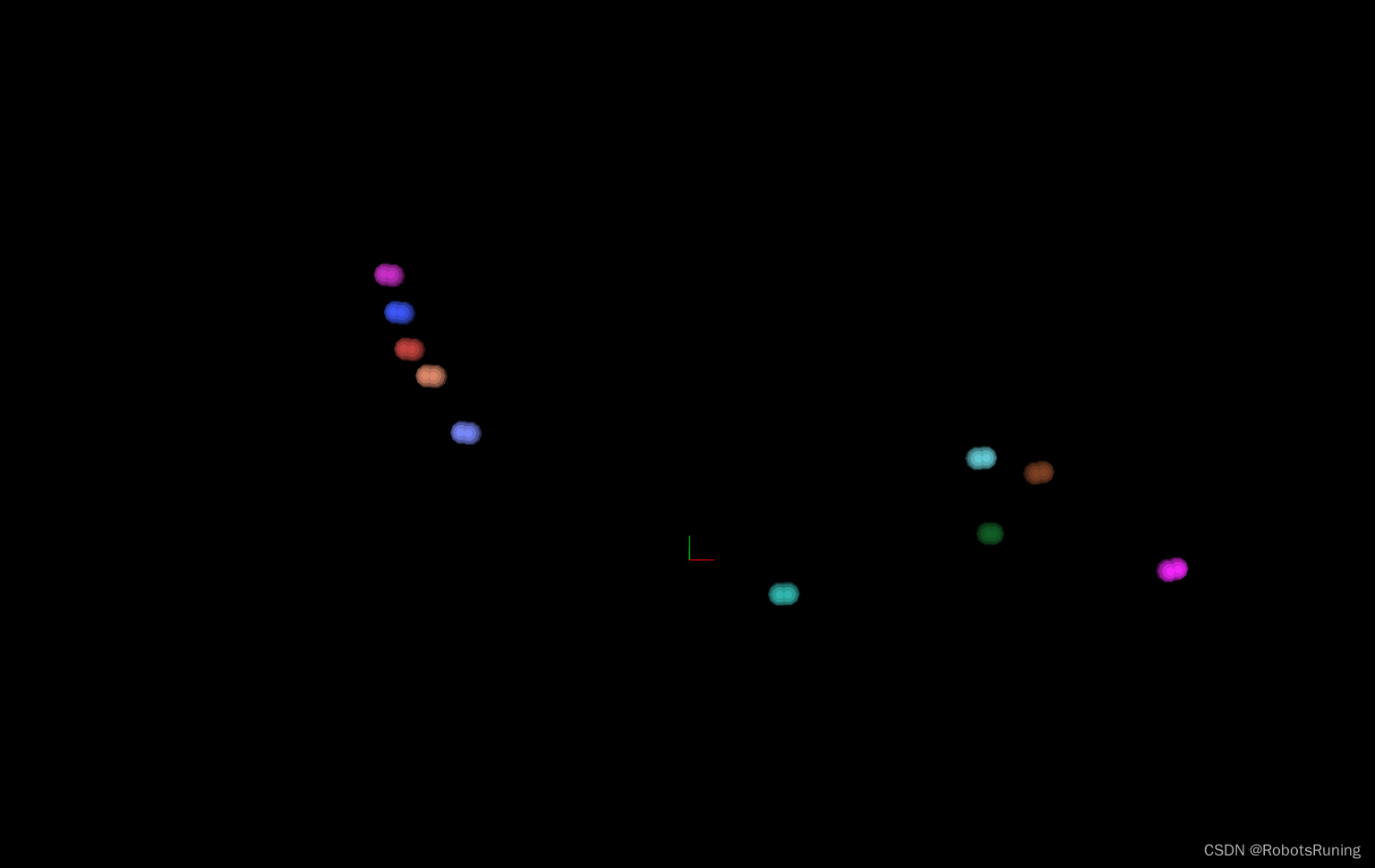
pcl::visualization::PCLVisualizer viewer("Centroid Visualization");int id = 0;// 添加 XY 坐标系double coordinate_system_scale = 2.0; // 根据需要调整尺度viewer.addCoordinateSystem(coordinate_system_scale, "coordinate_system", 0);double sphere_radius = 1; // 球体半径// 随机数生成器std::random_device rd; // 随机数种子std::mt19937 gen(rd()); // 随机数生成器std::uniform_real_distribution<> dis(0, 1); // 分布范围// 为匹配的中心点对添加球体for (size_t i = 0; i < matched_indices.size(); ++i) {// 生成随机颜色float color_r = dis(gen);float color_g = dis(gen);float color_b = dis(gen);// 获取匹配对的索引auto[k_idx, underk_idx] = matched_indices[i];// 获取匹配点Eigen::Vector2d point_k = centroids_unknown_motion_k[k_idx];Eigen::Vector2d point_underk = centroids_unknown_motion_underk[underk_idx];// 为 k 时刻的点添加球体viewer.addSphere(pcl::PointXYZ(point_k[0], point_k[1], 0), sphere_radius, color_r, color_g, color_b, "matched_k_" + std::to_string(i));// 为 underk 时刻的点添加球体viewer.addSphere(pcl::PointXYZ(point_underk[0], point_underk[1], 0), sphere_radius, color_r, color_g, color_b, "matched_underk_" + std::to_string(i));}// 启动可视化while (!viewer.wasStopped()) {viewer.spinOnce();}