本文相关内容只记录看论文过程中一些难点问题,内容间逻辑性不强,甚至有点混乱,因此只作为本人“备忘”,不建议其他人阅读。
Denoising Diffusion Probabilistic Models: https://arxiv.org/abs/2006.11239
DDPM
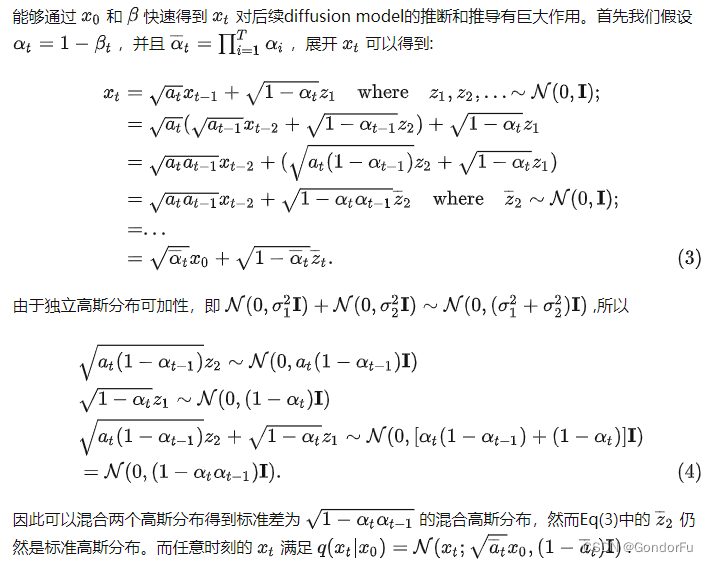
一、基于 已知的情况下,
分布的推导过程:推导过程中,直接递归迭代即可。同时,过程中使用了 —— 两个高斯分布的和也满足高斯分布,其中均值为两个高斯分布均值的和,方差为两个高斯分布方差的和。
二、逆向过程中, 分布求解
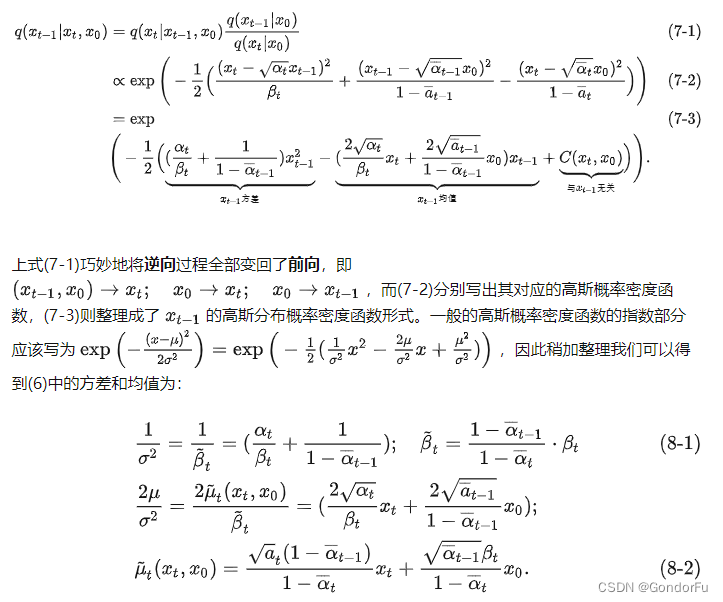
进一步根据 1 中的结果可得:
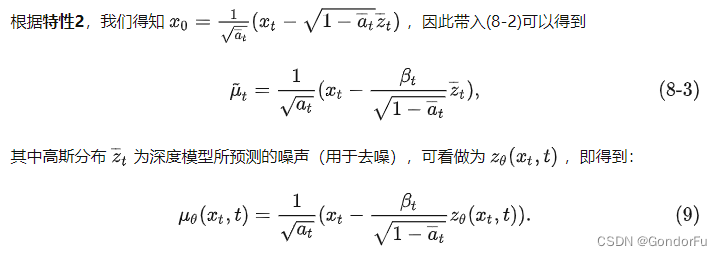
公式 9 中的 就是 diffusion model 需要估计的噪声均值,而噪声的方式是由
或者
直接得到的。
三、具体训练过程:训练过程比较直接,利用 一 中的公式即可。
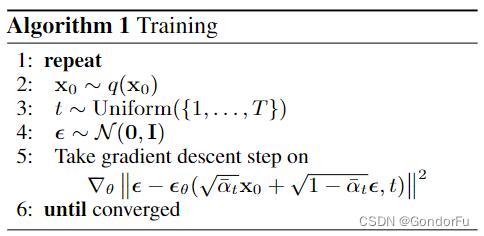
https://github.com/CompVis/stable-diffusion/blob/main/ldm/models/diffusion/ddpm.py L274def q_sample(self, x_start, t, noise=None):noise = default(noise, lambda: torch.randn_like(x_start))return (extract_into_tensor(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +extract_into_tensor(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * noise)def get_loss(self, pred, target, mean=True):if self.loss_type == 'l1':loss = (target - pred).abs()if mean:loss = loss.mean()elif self.loss_type == 'l2':if mean:loss = torch.nn.functional.mse_loss(target, pred)else:loss = torch.nn.functional.mse_loss(target, pred, reduction='none')else:raise NotImplementedError("unknown loss type '{loss_type}'")return loss# 输入参数说明:
# x_start:原始图像 x0
# t:当前扩散步数
# noise:噪声,需要注意这里的 noise 与 x_start 维度相同;具体含义是每个位置上元素都服从 0-1 高斯分布
def p_losses(self, x_start, t, noise=None):# 生成第 t 步的高斯噪声noise = default(noise, lambda: torch.randn_like(x_start))# 根据本文 一 中推导的公式得到第 t 步加噪后的图像x_noisy = self.q_sample(x_start=x_start, t=t, noise=noise)# 模型预测结果,根据具体的设置,好像可以回归加的噪声,也可以直接回归原始图像model_out = self.model(x_noisy, t)loss_dict = {}if self.parameterization == "eps":# 模型估计噪声target = noiseelif self.parameterization == "x0":# 模型直接估计原始图像target = x_startelse:raise NotImplementedError(f"Paramterization {self.parameterization} not yet supported")# 使用 L1 或者 L2 Loss 计算误差loss = self.get_loss(model_out, target, mean=False).mean(dim=[1, 2, 3])log_prefix = 'train' if self.training else 'val'loss_dict.update({f'{log_prefix}/loss_simple': loss.mean()})loss_simple = loss.mean() * self.l_simple_weightloss_vlb = (self.lvlb_weights[t] * loss).mean()loss_dict.update({f'{log_prefix}/loss_vlb': loss_vlb})loss = loss_simple + self.original_elbo_weight * loss_vlbloss_dict.update({f'{log_prefix}/loss': loss})return loss, loss_dict四、具体生成(采样)过程:根据 二 中推导的公式,依次计算前一步图像的分布。需要注意:
- 具体回归的均值的维度与图像维度完全相同,即图像每个位置(包括不同通道)都建模为高斯分布,均值就是无随机时图像应该有的“样子”
- 因此,在 T=0 步得到的均值就是最终生成的图像;不过在 T> 0 步依据均值和方差进行采样,可能的原因是增加生成图像的多样性。
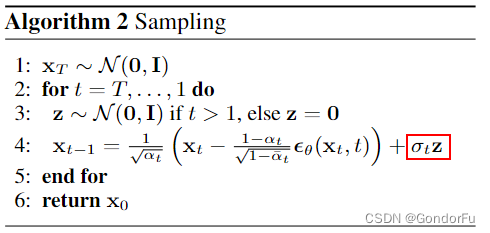
https://github.com/CompVis/stable-diffusion/blob/main/ldm/models/diffusion/ddpm.py L222# 根据本文 二 中的公式计算 x_t-1 的均值和方差
def q_posterior(self, x_start, x_t, t):posterior_mean = (extract_into_tensor(self.posterior_mean_coef1, t, x_t.shape) * x_start +extract_into_tensor(self.posterior_mean_coef2, t, x_t.shape) * x_t)posterior_variance = extract_into_tensor(self.posterior_variance, t, x_t.shape)posterior_log_variance_clipped = extract_into_tensor(self.posterior_log_variance_clipped, t, x_t.shape)return posterior_mean, posterior_variance, posterior_log_variance_clippeddef p_mean_variance(self, x, t, clip_denoised: bool):model_out = self.model(x, t)if self.parameterization == "eps":x_recon = self.predict_start_from_noise(x, t=t, noise=model_out)elif self.parameterization == "x0":x_recon = model_outif clip_denoised:x_recon.clamp_(-1., 1.)model_mean, posterior_variance, posterior_log_variance = self.q_posterior(x_start=x_recon, x_t=x, t=t)return model_mean, posterior_variance, posterior_log_variance# 基于估计的图像每个位置的均值 model_mean 和方差 model_log_variance 生成对应随机图像
@torch.no_grad()
def p_sample(self, x, t, clip_denoised=True, repeat_noise=False):b, *_, device = *x.shape, x.devicemodel_mean, _, model_log_variance = self.p_mean_variance(x=x, t=t, clip_denoised=clip_denoised)noise = noise_like(x.shape, device, repeat_noise)# no noise when t == 0nonzero_mask = (1 - (t == 0).float()).reshape(b, *((1,) * (len(x.shape) - 1)))return model_mean + nonzero_mask * (0.5 * model_log_variance).exp() * noise# 从 T 步 ——> T-1 步 ——> ... ——> 0 步,依次进行反向估计
@torch.no_grad()
def p_sample_loop(self, shape, return_intermediates=False):device = self.betas.deviceb = shape[0]img = torch.randn(shape, device=device)intermediates = [img]for i in tqdm(reversed(range(0, self.num_timesteps)), desc='Sampling t', total=self.num_timesteps):img = self.p_sample(img, torch.full((b,), i, device=device, dtype=torch.long),clip_denoised=self.clip_denoised)if i % self.log_every_t == 0 or i == self.num_timesteps - 1:intermediates.append(img)if return_intermediates:return img, intermediatesreturn img# 采样入口函数,batch_size 一次生成的图像数量
@torch.no_grad()
def sample(self, batch_size=16, return_intermediates=False):image_size = self.image_sizechannels = self.channelsreturn self.p_sample_loop((batch_size, channels, image_size, image_size),return_intermediates=return_intermediates)