1.设计任务
利用AT89C51单片机为核心控制元件,设计一个电子闹钟,设计的系统实用性强、操作简单,实现了智能化、数字化。
(1)按开始键自动进入时间显示,开始为0,按K1键进入更改时间,闪烁位为可更改位,按K1键调整更改位,K2键为自增键,K3键为关闭响铃键,修改成功之后按K1键确定修改成功;
(2)按K1键进入秒表功能,再次按K2键秒表开始计时,K3键为秒表暂停键,继续则按K2键,K3键为清零键;
(3)按K1键进入闹钟功能,进去之后闪烁位为可更改位,按K1键调整更改位,K2键为自增键,K3键为关闭键。
2. 设计要求
2.1系统方案论证
根据设计任务,分析设计系统的组成,给出实现设计任务的几种方案,分析比较几种设计方案的优略,本着尽量以软件代替硬件,同时力求电路简单,工作可靠的原则,确定总体设计方案。
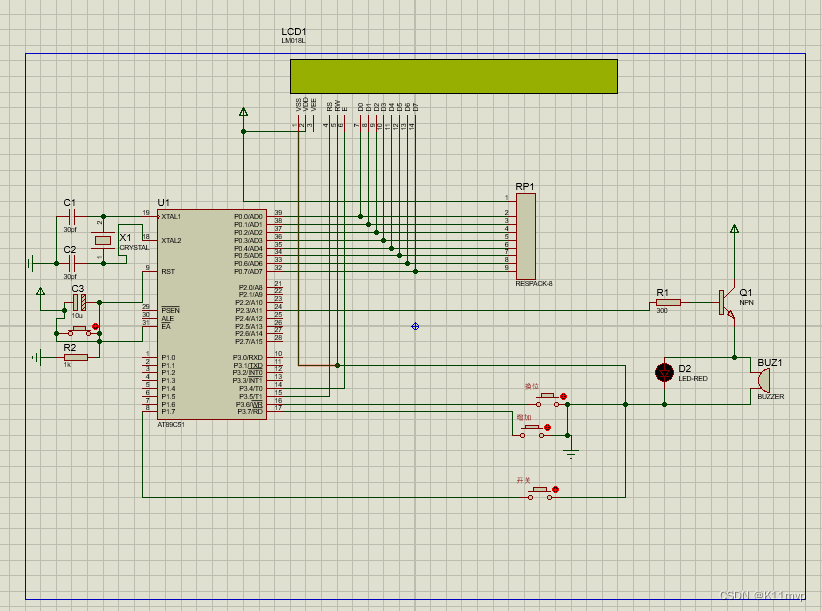
2.2系统硬件电路设计
根据系统设计方案进行软、硬件的分配,软、硬件设计分别进行。硬件设计包括单片机最小系统和扩展接口及配置,硬件结构在设计时要选择合适的元器件,硬件电路要简洁、工作可靠,需用Proteus绘制整个系统的电路仿真原理图。
2.3软件设计
根据该系统要求的功能进行软件设计,简述软件的功能,并根据每个模块的功能绘制软件流程图,根据流程图编写程序并汇编调试通过;列出软件清单,软件清单要求加以注释。
2.4 软硬件系统仿真
将编译后的程序软件加载到Proteus软件仿真的单片机ROM中,运行系统,实现软件程序对单片机系统的硬件电路的控制,并调试仿真结果,直至与设计任务相符。
#include<reg51.h>
#include<stdlib.h>
#include<stdio.h>
#include<intrins.h>
#define uint unsigned int
#define uchar unsigned charuint num,A_num,x=0;
uint h,m,s;
uint h1=0,m1=0,s1=0,sign=1; uchar code Zifu[]="0123456789";sbit beep = P2^3;sbit LCD_EN = P3^4;
sbit LCD_RS = P3^5;sbit duan = P2^6;
sbit wei = P2^7;sbit key_A = P3^6;
sbit key_B = P3^7;void delay_1ms(uchar x){uchar i,j;for(j=0;j<x;j++)for(i=0;i<110;i++);
}void write_command(uchar command){LCD_RS = 0;LCD_EN = 0;P0 = command;delay_1ms(2);LCD_EN = 1; //EN 由1 -- 0 完成 有效数据 的 锁存delay_1ms(2);LCD_EN = 0;
}void write_data(uchar yes){LCD_RS = 1;LCD_EN = 0;P0 = yes;delay_1ms(2);LCD_EN = 1;delay_1ms(2);LCD_EN = 0;
}void lcd_post(int X,int Y){ //0,1表征 第一行 和 第二行write_command(0x80+X*(0x40)+Y);
}void init(){h=m=s=0;num=A_num=0;LCD_EN=0;write_command(0x38);write_command(0x0c);//write_command(0x06); //写字符后地址指针加一write_command(0x01);TMOD = 0x02;TH0 = 6;TL0 = 6;EA = 1;ET0 = 1;TR0 = 1;/*时分秒*/ lcd_post(0,0); write_data(Zifu[h/10]);lcd_post(0,1); write_data(Zifu[h%10]);lcd_post(0,2); write_data(':');lcd_post(0,3); write_data(Zifu[m/10]);lcd_post(0,4); write_data(Zifu[m%10]);lcd_post(0,5); write_data(':');lcd_post(0,6); write_data(Zifu[s/10]);lcd_post(0,7); write_data(Zifu[s%10]);lcd_post(1,5); write_data('a');lcd_post(1,6); write_data('l');lcd_post(1,7); write_data('a');lcd_post(1,8); write_data('r');lcd_post(1,9); write_data('m');lcd_post(1,10); write_data(' ');lcd_post(1,11); write_data('c');lcd_post(1,12); write_data('l');lcd_post(1,13); write_data('o');lcd_post(1,14); write_data('c');lcd_post(1,15); write_data('k');
}void ling()
{unsigned char a;for(a=0;a<500;a++){if((P1&0x80)==0){break;}lcd_post(1,5); write_data('l');lcd_post(1,6); write_data('i');lcd_post(1,7); write_data('n');lcd_post(1,8); write_data('g');lcd_post(1,9); write_data('!');lcd_post(1,10); write_data(' ');lcd_post(1,11); write_data('l');lcd_post(1,12); write_data('i');lcd_post(1,13); write_data('n');lcd_post(1,14); write_data('g');lcd_post(1,15); write_data('!');beep=0; delay_1ms(500);lcd_post(1,5); write_data(' ');lcd_post(1,6); write_data(' ');lcd_post(1,7); write_data(' ');lcd_post(1,8); write_data(' ');lcd_post(1,9); write_data(' ');lcd_post(1,10); write_data(' ');lcd_post(1,11); write_data(' ');lcd_post(1,12); write_data(' ');lcd_post(1,13); write_data(' ');lcd_post(1,14); write_data(' ');lcd_post(1,15); write_data(' ');beep=1;delay_1ms(500);}lcd_post(1,5); write_data('a');lcd_post(1,6); write_data('l');lcd_post(1,7); write_data('a');lcd_post(1,8); write_data('r');lcd_post(1,9); write_data('m');lcd_post(1,10); write_data(' ');lcd_post(1,11); write_data('c');lcd_post(1,12); write_data('l');lcd_post(1,13); write_data('o');lcd_post(1,14); write_data('c');lcd_post(1,15); write_data('k');}void keyscan(){if(key_A==0){delay_1ms(3);if(key_A==0){A_num++; switch(A_num){case 1: //时TR0=0; lcd_post(0,1);write_command(0x0f);break;case 2:lcd_post(0,4);break; //分case 3:lcd_post(0,7);break; //秒case 4:A_num=0;write_command(0x0c);TR0=1;sign = 0;break;} }while(!key_A);}if(A_num!=0){if(key_B==0){delay_1ms(3);if(key_B==0){ switch(A_num){case 1:h1=(++h1)%24;lcd_post(0,0); write_data(Zifu[h1/10]);lcd_post(0,1); write_data(Zifu[h1%10]);break; //时case 2:m1=(++m1)%60;lcd_post(0,3); write_data(Zifu[m1/10]);lcd_post(0,4); write_data(Zifu[m1%10]);break; //分case 3:s1=(++s1)%60;lcd_post(0,6); write_data(Zifu[s1/10]);lcd_post(0,7); write_data(Zifu[s1%10]);break; //秒case 4:sign = 0;break;}write_command(0x10); }while(!key_B);}}
}void main()
{ int clk1 =0;int clk2 =0;there:beep=0;init();//there:h1=m1=s1=0;while(sign){keyscan();}clk1 = 0;clk2 = h1*3600+m1*60+s1;init();while(1){if(num==3686){num=0;s++;clk1++;if(clk1 > clk2){ling();sign = 1;goto there;}if(s==60){s=0;m++;if(m==60){m=0;h++;if(h==24)h=0;lcd_post(0,0); write_data(Zifu[h/10]);lcd_post(0,1); write_data(Zifu[h%10]);}lcd_post(0,3); write_data(Zifu[m/10]);lcd_post(0,4); write_data(Zifu[m%10]);}lcd_post(0,6); write_data(Zifu[s/10]);lcd_post(0,7); write_data(Zifu[s%10]);}}
}完整代码点开链接私信 免费 获取。
【iBot机器人工作室的个人空间-哔哩哔哩】 https://b23.tv/ryUWVKa