笔记【嵌入式板级系统设计】
- 前言
- 版权
- 笔记【嵌入式板级系统设计】
- 资料学习
- 面包板焊接注意
- 焊接教程
- 焊接电路板
- 基础代码
- GPIO 外部中断 定时中断 三合一
- 串口
- 综合实验 风扇控制系统
- 下板
- 三合一
- 窗口
- 综合实验
- 最后
前言
2023-11-20 08:49:57
以下内容源自《【创作模板五】》
仅供学习交流使用
版权
禁止其他平台发布时删除以下此话
本文首次发布于CSDN平台
作者是CSDN@日星月云
博客主页是https://jsss-1.blog.csdn.net
禁止其他平台发布时删除以上此话
笔记【嵌入式板级系统设计】
资料学习
面包板焊接注意
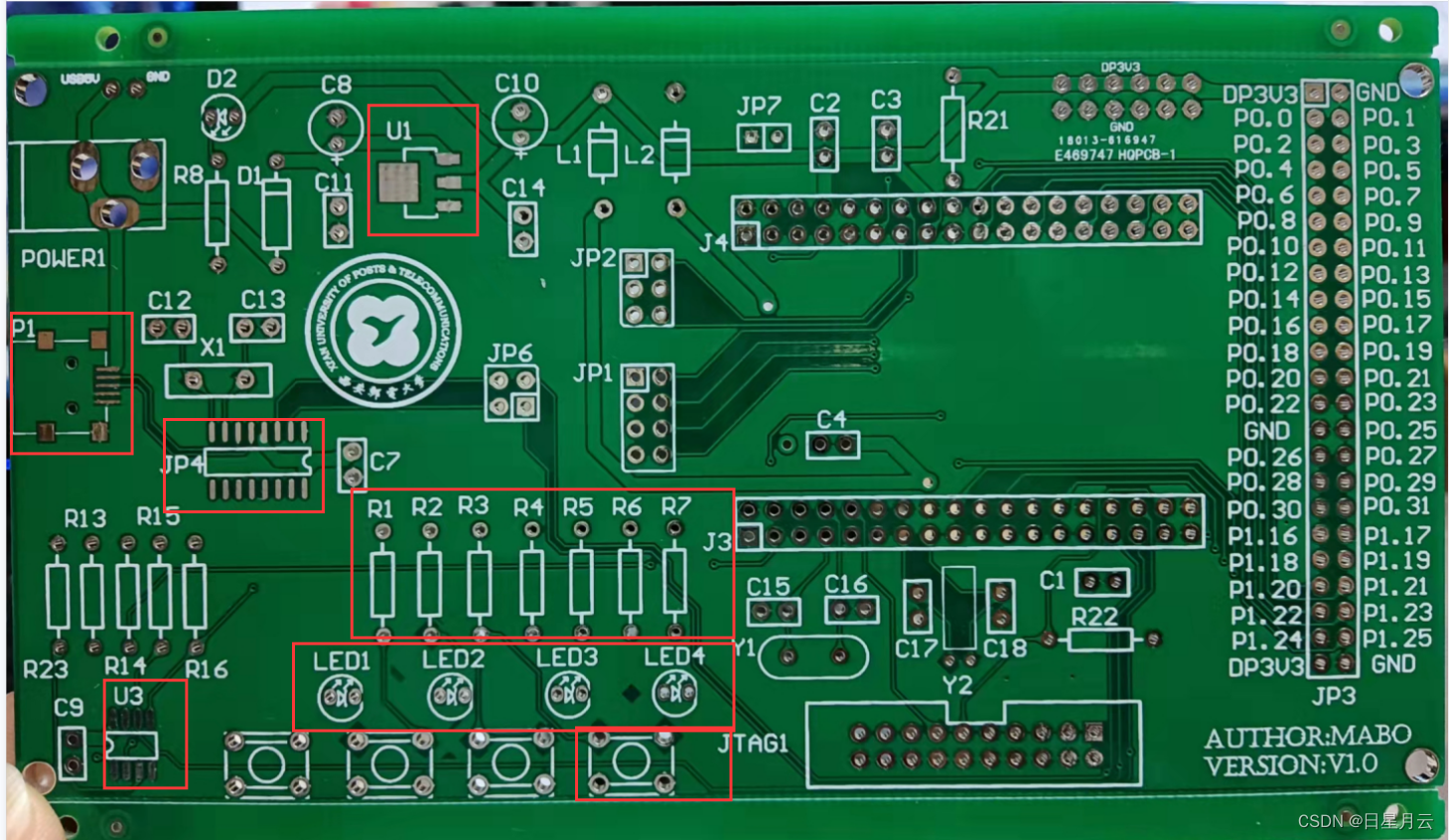
P1:mini USB
JP4:usb转串口
U1:电源
U3:
R1~7:电阻 规格 (型号阻值)
LED1~4:灯 正负极
按钮:正反
焊接教程
老司机焊接纯干货分享,让你焊接不迷路,很适合零基础小白
焊接电路板
基础代码
GPIO 外部中断 定时中断 三合一
/**************************************** 2015-05-28 **************************************************
**
** XY Embeded Lib.
**
**
**--------------File Info-------------------------------------------------------------------------------
** File name: main.c
** Last modified Date: 2015-05-28
** Last Version: 1.0
** Descriptions: The main() function example template
**
**------------------------------------------------------------------------------------------------------
** Created by: ZQL
** Created date: 2015-05-28
** Version: 1.0
** Descriptions: The original version
**
**------------------------------------------------------------------------------------------------------
** Modified by: ZQL
** Modified date: 2015-05-28
** Version:
** Descriptions: GPIO输出实验,控制LED1闪烁。
**
********************************************************************************************************/
#include "lpc213x.h"
#include "TypeDef.h"
extern void IRQEnable(void);
extern void IRQDisable(void);
extern void FIQEnable(void);
extern void FIQDisable(void);const uint32 LED1 = (1 << 17); // P1.18控制LED1,低电平点亮
const uint32 LED2 = (1 << 18); // P1.18控制LED1,低电平点亮
const uint32 LED3 = (1 << 19); // P1.18控制LED1,低电平点亮
const uint32 LED4 = (1 << 20); // P1.18控制LED1,低电平点亮
const uint32 LEDS = LED1 | LED2 | LED3 | LED4; // P1.18控制LED1,低电平点亮
const uint32 LEDS1 = LED1 | LED3;
const uint32 LEDS2 = LED2 | LED4;const uint32 KEY1 = (1 << 16); // P1.18控制LED1,低电平点亮
const uint32 KEY2 = (1 << 14); // P1.18控制LED1,低电平点亮
const uint32 KEY3 = (1 << 15); // P1.18控制LED1,低电平点亮
const uint32 KEYS = (0x07<<14);uint32 j;//定时器
#define Fosc 11059200 // 开发板外时钟频率
#define Fcclk (5*Fosc) // Keil 默认的CPU时钟设置
#define Fpclk (Fcclk/4) // Keil 默认的DEV时钟设置/*
*********************************************************************************************************
** 函数名称 :DelayNS()
** 函数功能 :长软件延时
** 入口参数 :dly 延时参数,值越大,延时越久
** 出口参数 :无
*********************************************************************************************************
*/
void DelayNS (uint32 dly)
{uint32 i;for ( ; dly>0; dly--)for (i=0; i<50000; i++);
}void __irq IRQ_Eint0_ISR (void)
{volatile uint32 Vkey=0;IO0SET = LEDS;/* 等待外部中断信号恢复为高电平,若信号保持为低电平,中断标志会一直置位。*/while ((EXTINT & 0x01) != 0)//循环检测外部中断信号是否恢复为高电平,若信号保持为低电平,中断标志位会一直置位。{EXTINT = 0x01; /* 清除EINT0中断标志 */}VICVectAddr = 0; /* 向量中断结束 */
}/*
*********************************************************************************************************
** 函数名称 :main()
** 函数功能 :用P1.18控制LED1,让LED1闪烁。
** 调试说明 :需将跳线JP12和LED1短接。
*********************************************************************************************************
*/
int main (void)
{
// PINSEL1 = 0x00000000; // 设置管脚连接GPIO,此行可省掉-----复位默认P0[31:16]连接GPIOvolatile uint32 Vkey=0;PINSEL0 = PINSEL0 & (~0xf0000000); // P1[25:16]连接GPIO,此行可省掉-----复位默认P1[25:16]连接GPIOPINSEL1 = 0x00000001; // P1[25:16]连接GPIO,此行可省掉-----复位默认P1[25:16]连接GPIOIO0DIR |= LEDS;//中断程序EXTMODE = 0x00; /* 设置EINT0为'低电平'方式触发。 */EXTPOLAR = 0x00; // EXTMODE = 0x00; /* 设置EINT0为负沿方式触发。 */
// EXTPOLAR = 0x00;/* 极性寄存器使用默认值0 */IRQEnable(); // 使能IRQ中断//IRQDisable(); // 禁能IRQ中断/* 打开EINT0中断(使用向量中断) */VICIntSelect = 0x00000000; /* 设置所有中断分配为IRQ中断*/VICVectCntl0 = 0x20 | 0x0e; /* 分配外部中断0到向量中断0 */VICVectAddr0 = (uint32)IRQ_Eint0_ISR; /* 设置中断服务程序地址 */EXTINT = 0x01; /* 清除EINT0中断标志 */VICIntEnable = 1 << 0x0e; /* 使能EINT0中断 *//* 定时器0初始化 */T0CTCR &= 0xf0; // Set T0 as Timer modeT0TC = 0; // 定时器设置为0 T0PR = 0; // 时钟不分频T0MCR = 0x03; // 设置T0MR0匹配后复位T0TC,并产生中断标志//T0MR0 = Fpclk / 2; // 0.5秒钟定时 --- 匹配目标值T0MR0 = Fpclk/4 ; // 0.25秒钟定时 --- 匹配目标值T0TCR = 0x01; // 启动定时器 /* 定时器1初始化 */ T1CTCR &= 0xf0; // Set T0 as Timer modeT1TC = 0; // 定时器设置为0 T1PR = 0; // 时钟不分频T1MCR = 0x03; // 设置T0MR0匹配后复位T0TC,并产生中断标志//T0MR0 = Fpclk / 2; // 0.5秒钟定时 --- 匹配目标值T1MR0 = Fpclk/2 ; // 0.5秒钟定时 --- 匹配目标值T1TCR = 0x01; // 启动定时器 while(1){Vkey = (IO0PIN & KEYS);//读取开关if ((Vkey & KEY2) == 0)j=2;else if ((Vkey & KEY3) == 0)j=3;if(j == 3){//定时int temp = 10;while (temp--){if ((T0IR & 0x01) == 0x01){if ((IO0SET & LEDS1) == 0)IO0SET = LEDS1; // 关闭BEEP elseIO0CLR = LEDS1;T0IR = 0x01; // 清除中断标志 }if ((T1IR & 0x01) == 0x01){if ((IO0SET & LEDS2) == 0)IO0SET = LEDS2; // 关闭BEEP elseIO0CLR = LEDS2;T1IR = 0x01; // 清除中断标志 }DelayNS(25);}}else if(j == 2){//流水灯IO0CLR = LED1;DelayNS(25);IO0SET = LED1; DelayNS(25);IO0CLR = LED2;DelayNS(25);IO0SET = LED2; DelayNS(25);IO0CLR = LED3;DelayNS(25);IO0SET = LED3; DelayNS(25);IO0CLR = LED4;DelayNS(25);IO0SET = LED4; DelayNS(25);}else {//全亮IO0CLR = LEDS;}}//return 0;}
/*********************************************************************************************************
** End Of File
********************************************************************************************************/
串口
/**************************************** 2015-05-28 **************************************************
**
** XY Embeded Lib.
** QQ: 646938309
**
**--------------File Info-------------------------------------------------------------------------------
** File name: main.c
** Last modified Date: 2015-05-28
** Last Version: 1.0
** Descriptions: The main() function example template
**
**------------------------------------------------------------------------------------------------------
** Created by: Zhao QuanLiang
** Created date: 2015-05-28
** Version: 1.0
** Descriptions: The original version
**
**------------------------------------------------------------------------------------------------------
** Modified by: Zhao QuanLiang
** Modified date: 2015-05-28
** Version:
** Descriptions: UART0 monitor the data input and send the data back.
** 本例程中修改了startup.s 的 128th 行,as ‘PLLCFG_Val EQU 0x23’ 原为 0x24
** (0x23 --- Fcclk 4*Fosc, 0x24 ---- Fcclk 5*Fosc, Fosc = 11059200Hz)
********************************************************************************************************/#include "lpc213x.h"
#include "TypeDef.h"extern void IRQEnable(void);
extern void IRQDisable(void);
extern void FIQEnable(void);
extern void FIQDisable(void);#define Fpclk 11059200 // #define LINE_L 8 // 行长
#define PAGE_L 2 // 段长/* 定义串口模式设置数据结构 */
typedef struct UartMode
{uint8 datab; // 字长度,5/6/7/8可选uint8 stopb; // 停止位,1/2可选uint8 parity; // 奇偶校验位,0-无校验,1-奇校验,2-偶校验
}UARTMODE;volatile uint8 rcv_buf[8]; // UART0数据接收缓冲区
volatile uint8 rcv_new; // 接收新数据标志
volatile uint8 zql_U0IIR;
volatile uint8 zql_chNum;/*
*********************************************************************************************************
** 函数名称 :IRQ_UART0()
** 函数功能 :串口0接收中断服务程序
** 入口参数 :无
** 出口参数 :无
*********************************************************************************************************
*/
void __irq IRQ_UART0 (void)
{uint8 i=0;rcv_new = 1; // 设置接收到新的数据标志zql_U0IIR = (U0IIR >> 1) & 0x07;switch (zql_U0IIR){ // 分析中断源 case 0x02:for (i=0; i<8; i++)rcv_buf[i] = U0RBR; // 读取FIFO的数据,并清除中断 break;case 0x06:while((U0LSR & 0x01) == 0x01){rcv_buf[i] = U0RBR; // 读取FIFO的数据,并清除中断i++;}break;} zql_chNum=i;zql_U0IIR=U0IIR;VICVectAddr = 0x00; // 中断处理结束
}/*
*********************************************************************************************************
** 函数名称 :UART0_SendByte()
** 函数功能 :向串口0发送1字节数据
** 入口参数 :dat 要发送的数据
** 出口参数 :无
*********************************************************************************************************
*/
void UART0_SendByte (uint8 dat)
{U0THR = dat; // 要发送的数据
}/*
*********************************************************************************************************
** 函数名称 :UART0_SendBuf()
** 函数功能 :向串口发送8字节数据
** 入口参数 :无
** 出口参数 :无
*********************************************************************************************************
*/
void UART0_SendBuf (void)
{uint8 i;for (i=0; i<zql_chNum; i++)UART0_SendByte(rcv_buf[i]);UART0_SendByte(0x0d);UART0_SendByte(0x0a);while ((U0LSR & 0x20) == 0); // 等待数据发送完毕
}/*
*********************************************************************************************************
** 函数名称 :UART0_Init()
** 函数功能 :串口初始化,设置工作模式和波特率。
** 入口参数 :baud 波特率
** set 模式设置(UARTMODE数据结构)
** 出口参数 :1-初始化成功, 0-初始化失败
*********************************************************************************************************
*/
int8 UART0_Init (uint32 baud, UARTMODE set)
{uint32 bak;/* 参数检查与过滤 */if ((baud ==0 ) || (baud > 115200)) return (0);if ((set.datab <5) || (set.datab > 8)) return (0);if ((set.stopb == 0) || (set.stopb > 2)) return (0);if (set.parity > 4) return (0);/* 设置串口波特率 */U0LCR = 0x80; // DLAB = 1 bak = (Fpclk >> 4) / baud;U0DLM = bak >> 8;U0DLL = bak & 0xFF;/* 设置串口模式 */bak = set.datab - 5; // 设置字长-----准备 UxLCR[1:0] 数据if (set.stopb == 2) // 设置停止位长-----准备 UxLCR[2:2] 数据bak |= 0x04; // 判断是否为2位停止位if (set.parity != 0) // 设置有无'奇偶校验'-----准备 UxLCR[3:3] 数据{set.parity = set.parity - 1;bak |= 0x08;}bak |= set.parity << 4; // 设置奇偶校验-----准备 UxLCR[3:3] 数据U0LCR = bak; // 装载UxLCR, 且UxLCR[7:7]=0 , 即 位 DLAB=0return (1);
}/*
*********************************************************************************************************
** 函数名称 :main()
** 函数功能 :从串口UART0接收字符串"ABCDEFGH",并发送回上位机显示。
** 调试说明 :需要PC串口显示终端软件如EasyARM.exe。
*********************************************************************************************************
*/
int main (void)
{UARTMODE set;set.datab = 8;set.stopb = 1;set.parity = 0;rcv_new = 0;zql_chNum=0;PINSEL0 = 0x00000005; // 设置GPIO_0[1:0]连接到UART0UART0_Init(115200, set); // 串口初始化U0FCR = 0x81; // 使能FIFO,并设置触发点为8字节//U0FCR = 0x01; // 使能FIFO,并设置触发点为1字节//U0IER = 0x01; // 允许RBR中断,即接收中断U0IER = 0x05; // 允许RBR和字符超时中断,即接收中断IRQEnable(); // 使能IRQ中断/* 使能UART0中断 */VICIntSelect = 0x00000000; // 设置所有的通道为IRQ中断VICVectCntl0 = 0x20 | 0x06; // UART0分配到IRQ slot0,即最高优先级VICVectAddr0 = (uint32)IRQ_UART0; // 设置UART0向量地址VICIntEnable = 1 << 0x06; // 使能UART0中断while (1){if (rcv_new == 1) // 如果有UART接收,则转发{ rcv_new =0;UART0_SendBuf();}}// return 0;
}
/*********************************************************************************************************
** End Of File
********************************************************************************************************/
综合实验 风扇控制系统
#include "lpc213x.h"
#include "TypeDef.h"
extern void IRQEnable(void);
extern void IRQDisable(void);
extern void FIQEnable(void);
extern void FIQDisable(void);const uint32 INA = (1 << 17); // P0.17控制INA,控制风扇转速的输入信号线
const uint32 INB = (1 << 18); // P0.18控制INB,控制风扇转向的输入信号线。const uint32 LEDS = INA | INB; // P1.18控制LED1和LED2,低电平点亮
const uint32 LEDS1 = INA;
const uint32 LEDS2 = INB;const uint32 KEY1 = (1 << 16); // P1.16控制KEY1,低电平按下
const uint32 KEY2 = (1 << 14); // P1.14控制KEY2,低电平按下
const uint32 KEY3 = (1 << 15); // P1.15控制KEY3,低电平按下
const uint32 KEYS = (0x07 << 14);uint32 j;//定时器
#define Fosc 11059200 // 开发板外时钟频率
#define Fcclk (5*Fosc) // Keil 默认的CPU时钟设置
#define Fpclk (Fcclk/4) // Keil 默认的DEV时钟设置/*
*********************************************************************************************************
** 函数名称 :DelayNS()
** 函数功能 :长软件延时
** 入口参数 :dly 延时参数,值越大,延时越久
** 出口参数 :无
*********************************************************************************************************
*/
void DelayNS(uint32 dly)
{uint32 i;for (; dly > 0; dly--)for (i = 0; i < 50000; i++);
}void __irq IRQ_Eint0_ISR(void)
{volatile uint32 Vkey = 0;//全灭IO0SET=LEDS;/* 等待外部中断信号恢复为高电平,若信号保持为低电平,中断标志会一直置位。*/while ((EXTINT & 0x01) != 0) //循环检测外部中断信号是否恢复为高电平,若信号保持为低电平,中断标志位会一直置位。{EXTINT = 0x01; /* 清除EINT0中断标志 */}VICVectAddr = 0; /* 向量中断结束 */
}/*
*********************************************************************************************************
** 函数名称 :main()
** 函数功能 :用P1.18控制LED1,让LED1闪烁。
** 调试说明 :需将跳线JP12和LED1短接。
*********************************************************************************************************
*/
int main(void)
{volatile uint32 Vkey = 0;PINSEL0 = PINSEL0 & (~0xf0000000); // P1[25:16]连接GPIO,此行可省掉-----复位默认P1[25:16]连接GPIOPINSEL1 = 0x00000001; // P1[25:16]连接GPIO,此行可省掉-----复位默认P1[25:16]连接GPIOIO0DIR |= LEDS;//中断程序EXTMODE = 0x00; /* 设置EINT0为'低电平'方式触发。 */EXTPOLAR = 0x00;VICIntSelect = 0x00000000; /* 设置所有中断分配为IRQ中断*/VICVectCntl0 = 0x20 | 0x0e; /* 分配外部中断0到向量中断0 */VICVectAddr0 = (uint32)IRQ_Eint0_ISR; /* 设置中断服务程序地址 */EXTINT = 0x01; /* 清除EINT0中断标志 */VICIntEnable = 1 << 0x0e; /* 使能EINT0中断 *//* 定时器0初始化 */T0CTCR &= 0xf0; // Set T0 as Timer modeT0TC = 0; // 定时器设置为0T0PR = 0; // 时钟不分频T0MCR = 0x03; // 设置T0MR0匹配后复位T0TC,并产生中断标志T0MR0 = Fpclk / 4; // 0.25秒钟定时 --- 匹配目标值T0TCR = 0x01; // 启动定时器while (1) {Vkey = (IO0PIN & KEYS);//读取开关if ((Vkey & KEY2) == 0)j = 2; else if ((Vkey & KEY3) == 0)j = 3;elsej = 0;if (j == 2) {//风扇转动IO0SET = INB;if ((T0IR & 0x01) == 0x01){if ((IO0SET & LEDS1) == 0)IO0SET = LEDS1; // 关闭BEEPelseIO0CLR = LEDS1;T0IR = 0x01; // 清除中断标志}}else if (j == 3) {//定时int temp = 10;while (temp--){IO0SET = INB;if ((T0IR & 0x01) == 0x01){if ((IO0SET & LEDS1) == 0)IO0SET = LEDS1; // 关闭BEEPelseIO0CLR = LEDS1;T0IR = 0x01; // 清除中断标志}DelayNS(25);}IO0CLR = LEDS;}}
}下板
三合一
K1 控制 外部中断 按下四个灯全灭
K2 流水灯
K3 定时中断 K1和K3 0.25秒闪烁 K2和K4 0.5秒闪烁
窗口
打开XCOM
设置波特率9600
打开窗口
发送文字,会接受文字
综合实验
初始 Led1和Led2全量 风扇不转
K1 外部中断 使Led1和Led2 灭
K2 使得Led1亮 Led2灭 风扇转动
K3 使得风扇转动一段时间,就停
最后
2023-12-7 20:01:13
我们都有光明的未来
不必感谢我,也不必记得我
祝大家考研上岸
祝大家工作顺利
祝大家得偿所愿
祝大家如愿以偿
点赞收藏关注哦