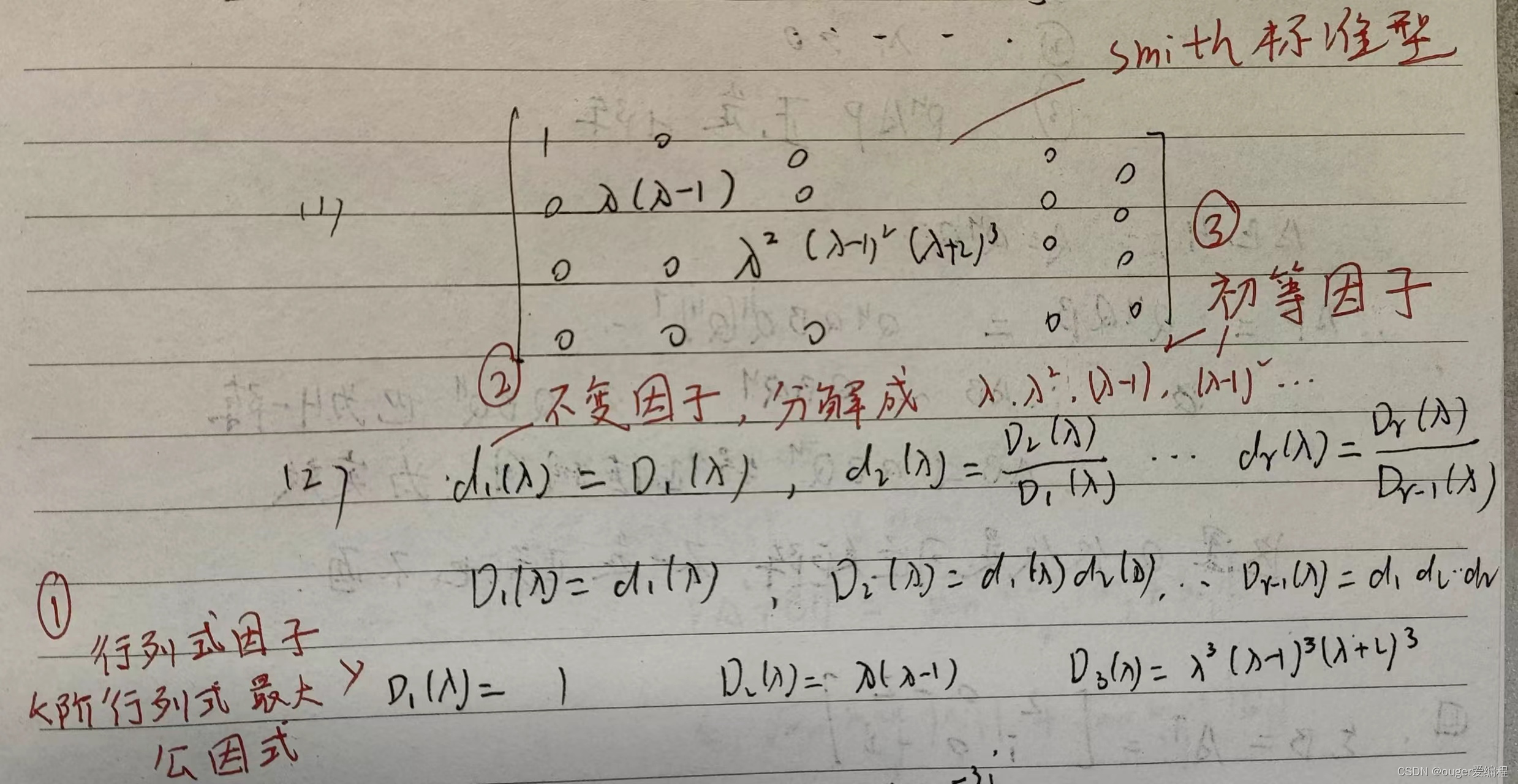
不变因子 初等因子 行列式因子 smith标准型
酉矩阵 H-阵等等
A H = A A^H = A AH=A 就是 H-阵
正定H阵的性质
若 A A A 为正定的H-阵.
- 存在可逆矩阵 Q Q Q, 使得 A = Q H Q A=Q^H Q A=QHQ.
- 存在 P P P, 使得 P H A P = I P^HAP=I PHAP=I.
- A的特征值大于0.
- Q − 1 A Q Q^{-1}AQ Q−1AQ 也是正定H-阵.
schmidt正交化
[ α 1 , α 2 , … , α n ] \Large[\alpha_1,\alpha_2,\dots,\alpha_n] [α1,α2,…,αn],需要将其正交化,计算过程如下:
β 1 = α 1 β 2 = α 2 − ( α 2 , β 1 ) ( β 1 , β 1 ) β 1 ⋮ β i = α i − ( α i , β 1 ) ( β 1 , β 1 ) β 1 − ( α i , β 2 ) ( β 2 , β 2 ) β 2 − ⋯ − ( α i , β i − 1 ) ( β i − 1 , β i − 1 ) β i − 1 \large \begin{aligned} \beta_1 &= \alpha_1\\ \beta_2 &= \alpha_2 - \frac{(\alpha_2,\beta_1)}{(\beta_1,\beta_1)}\beta_1\\ \vdots \\ \beta_i &= \alpha_i - \frac{(\alpha_i,\beta_1)}{(\beta_1,\beta_1)}\beta_1- \frac{(\alpha_i,\beta_2)}{(\beta_2,\beta_2)}\beta_2-\dots-\frac{(\alpha_i,\beta_{i-1})}{(\beta_{i-1},\beta_{i-1})}\beta_{i-1} \end{aligned} β1β2⋮βi=α1=α2−(β1,β1)(α2,β1)β1=αi−(β1,β1)(αi,β1)β1−(β2,β2)(αi,β2)β2−⋯−(βi−1,βi−1)(αi,βi−1)βi−1
投影变换
例题:已知 R 3 R^3 R3 中向量 a = ( 1 , 0 , 0 ) a=(1, 0, 0) a=(1,0,0) , β = ( 2 , 0 , 3 ) \beta=(2, 0 ,3) β=(2,0,3),则向量 x = ( x 1 , x 2 , x 3 ) ∈ R 3 x=(x_1,x_2,x_3 )\in{R^3} x=(x1,x2,x3)∈R3 在子空间 s p a n { α , β } span\{\alpha,\beta\} span{α,β} 上的正交投影为?
先将 α , β 标准正交化 为 η 1 = [ 1 , 0 , 0 ] T , η 2 = [ 0 , 0 , 1 ] T U = [ η 1 , η 2 ] 投影算子 P = U U H 向量 x = ( x 1 , x 2 , x 3 ) ∈ R 3 在子空间 s p a n { α , β } 上的正交投影为: P x = U U H x = [ 1 0 0 0 0 1 ] [ 1 0 0 0 0 1 ] [ x 1 , x 2 , x 3 ] T = [ 1 0 0 0 0 0 0 0 1 ] [ x 1 , x 2 , x 3 ] T = ( x 1 , 0 , x 3 ) \begin{aligned} 先将\alpha, \beta \boldsymbol{标准正交化}为\eta_1&=[1,0,0]^T, \eta_2=[0,0,1]^T\\ U &= [\eta_1, \eta_2] \\ \boldsymbol{投影算子}& \boldsymbol{P=UU^H} \\ 向量 x=(x_1,x_2,x_3 )\in{R^3} &在子空间span\{\alpha,\beta\} 上的正交投影为:\\ Px&=UU^Hx\\ &= { \left [ \begin {matrix} 1 & 0 \\ 0 & 0 \\ 0 & 1 \end {matrix} \right ] } { \left [ \begin {matrix} 1 & 0 & 0\\ 0 & 0 & 1\\ \end {matrix} \right ] } { [x_1,x_2,x_3]^T } \\&= \left[ \begin{matrix} 1 & 0&0 \\ 0 & 0 &0\\ 0 & 0 &1\\ \end{matrix} \right ] [x_1,x_2,x_3]^T \\&= (x_1,0,x_3) \end{aligned} 先将α,β标准正交化为η1U投影算子向量x=(x1,x2,x3)∈R3Px=[1,0,0]T,η2=[0,0,1]T=[η1,η2]P=UUH在子空间span{α,β}上的正交投影为:=UUHx= 100001 [100001][x1,x2,x3]T= 100000001 [x1,x2,x3]T=(x1,0,x3)
矩阵分解
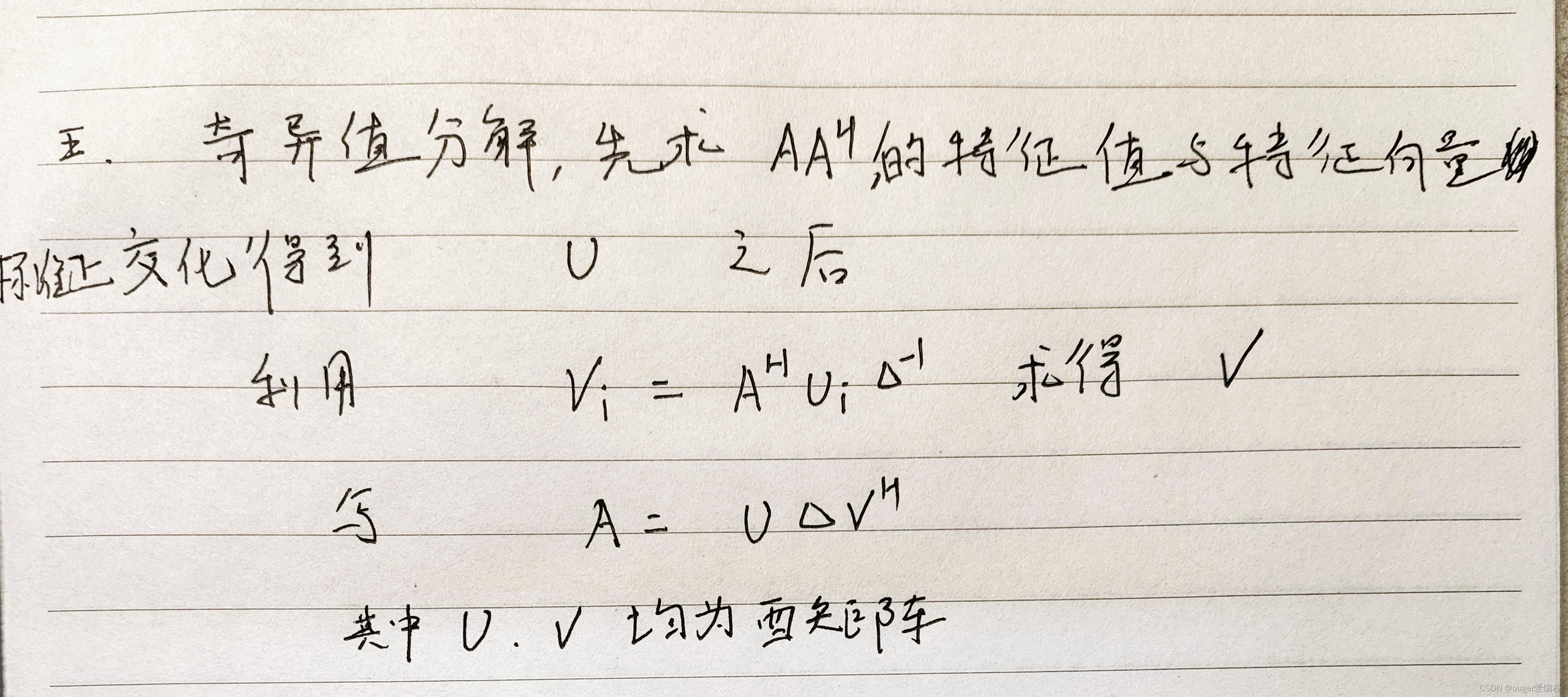
奇异值分解
ref
谱分解
要求 A A A 为正规矩阵,即 A H A = A A H A^HA=AA^H AHA=AAH
A = [ α 1 , α 2 , … , α n ] [ λ 1 λ 2 ⋱ λ n ] [ α 1 H α 2 H ⋮ α n H ] = λ 1 α 1 α 1 H + λ 2 α 2 α 2 H + ⋯ + λ n α n α n H = ∑ i = 1 r λ i ∑ j = 1 n i α i j α i j H = ∑ λ i G i \large {\begin{align} A &= [\alpha_1,\alpha_2,\dots,\alpha_n] \left[ \begin{matrix} \lambda_1 & \\ & \lambda_2 &\\ & &\ddots\\ & & &\lambda_n \end{matrix} \right ] \left[ \begin{matrix} \alpha_1^H\\ \alpha_2^H\\ \vdots\\ \alpha_n^H \end{matrix} \right]\\ &=\lambda_1\alpha_1\alpha_1^H + \lambda_2\alpha_2\alpha_2^H + \dots +\lambda_n\alpha_n\alpha_n^H\\ &=\sum_{i=1}^r \lambda_i\sum_{j=1}^{n_i}\alpha_{ij}\alpha_{ij}^H\\\ &=\sum\lambda_i G_i\\ \end{align} } A =[α1,α2,…,αn] λ1λ2⋱λn α1Hα2H⋮αnH =λ1α1α1H+λ2α2α2H+⋯+λnαnαnH=i=1∑rλij=1∑niαijαijH=∑λiGi
正交三角分解(UR分解)
不看了,困了。。
范数
向量范数
- 非负性
- 齐次性: ∣ ∣ k α ∣ ∣ = ∣ k ∣ ∣ α ∣ ∣ ||k\alpha||=|k||\alpha|| ∣∣kα∣∣=∣k∣∣α∣∣,k为任意复数。
- 三角不等式: 任取 α , β ,有 ∣ ∣ α + β ∣ ∣ ≤ ∣ ∣ α ∣ ∣ + ∣ ∣ β ∣ ∣ 任取\alpha ,\beta,有||\alpha +\beta||\leq||\alpha|| + ||\beta|| 任取α,β,有∣∣α+β∣∣≤∣∣α∣∣+∣∣β∣∣
2-范数: ∣ ∣ α ∣ ∣ 2 = ( ∑ i = 1 n ∣ a i ∣ 2 ) 1 2 ||\alpha||_2 = (\sum^n_{i=1}|a_i|^2)^{\frac{1}{2}} ∣∣α∣∣2=(∑i=1n∣ai∣2)21= ( α H α ) 1 2 (\alpha^H\alpha)^{\frac{1}{2}} (αHα)21
矩阵范数
- 非负性: 当 A ≠ 0 , ∣ ∣ A ∣ ∣ > 0 当A\neq 0, ||A||>0 当A=0,∣∣A∣∣>0,当且仅当 A = 0 , ∣ ∣ A ∣ ∣ = 0 A=0,||A||=0 A=0,∣∣A∣∣=0
- 齐次性:||kA||=|k|||A||,k为任意复数
- 三角不等式: 任取 A , B ∈ C m × n ,有 ∣ ∣ A + B ∣ ∣ ≤ ∣ ∣ A ∣ ∣ + ∣ ∣ B ∣ ∣ 任取A ,B\in C^{m\times n},有||A+B|| \leq||A|| + ||B|| 任取A,B∈Cm×n,有∣∣A+B∣∣≤∣∣A∣∣+∣∣B∣∣
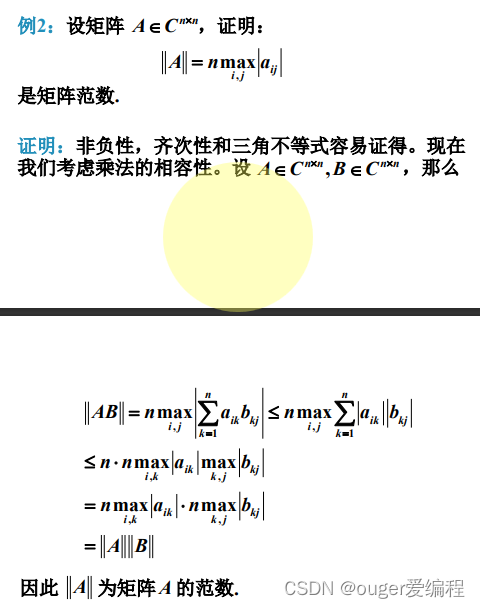
- 矩阵乘法的相容性:任意 A , B , ∣ ∣ A B ∣ ∣ ≤ ∣ ∣ A ∣ ∣ ∣ ∣ B ∣ ∣ A,B,||AB||\leq ||A||||B|| A,B,∣∣AB∣∣≤∣∣A∣∣∣∣B∣∣
做题时:1,2,3点都好证明。
相容性需要进行一点变换:
如:
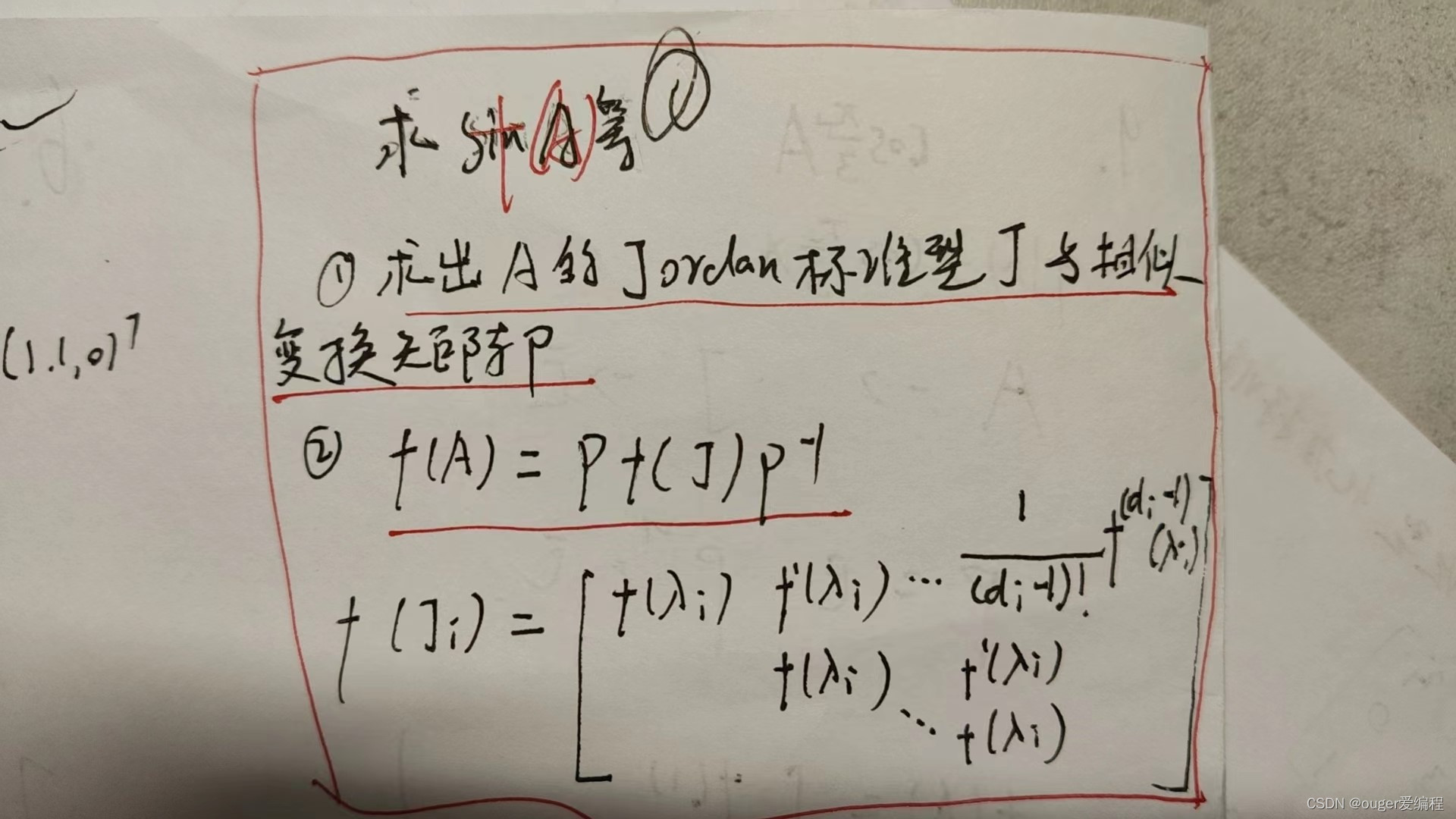
矩阵函数
求矩阵函数方法一: 求得 J 和相似变换矩阵 P 求得J 和 相似变换矩阵 P 求得J和相似变换矩阵P
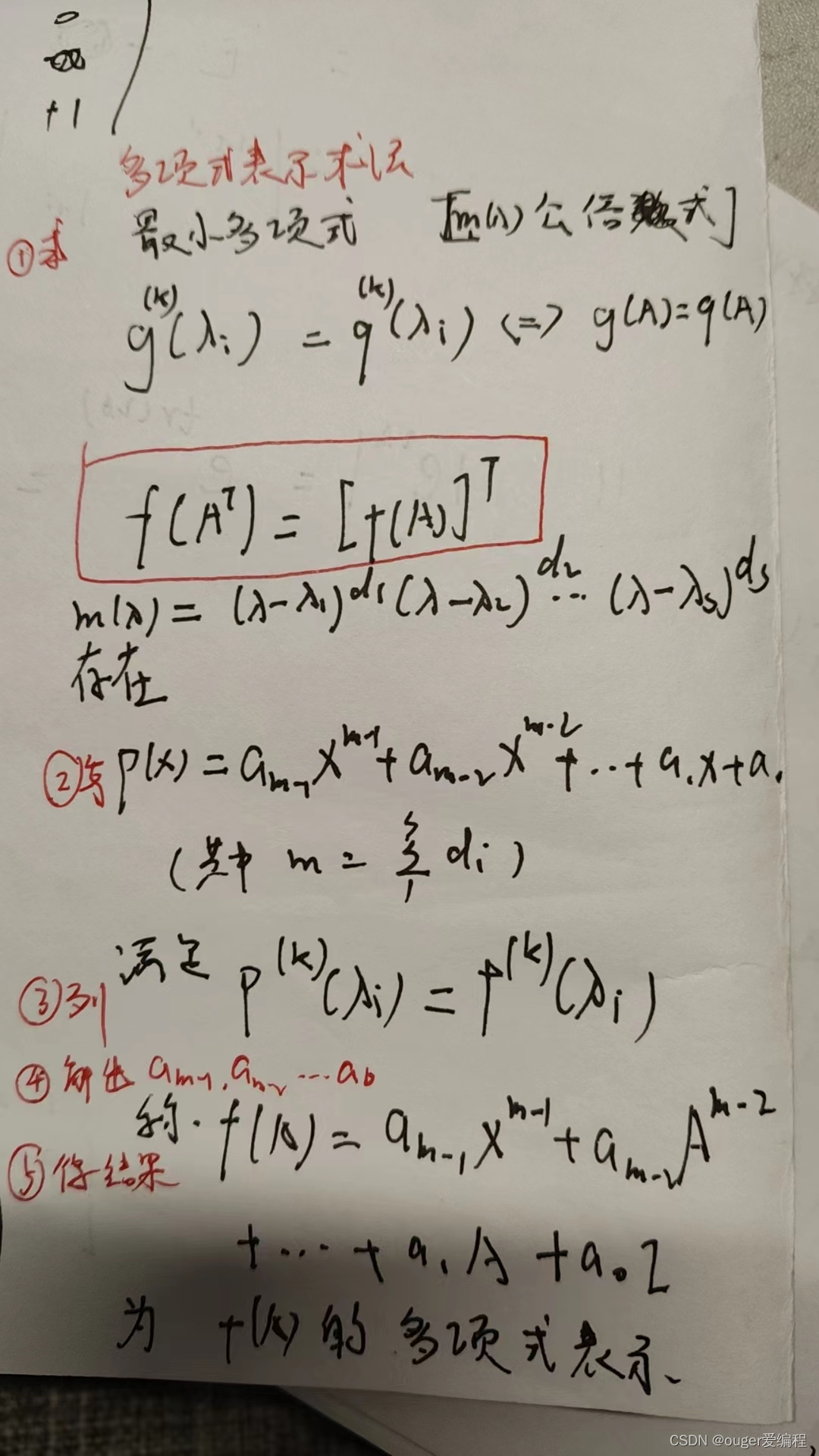
求矩阵函数方法二: 利用最小多项式 m ( λ ) 利用最小多项式m(\lambda) 利用最小多项式m(λ)
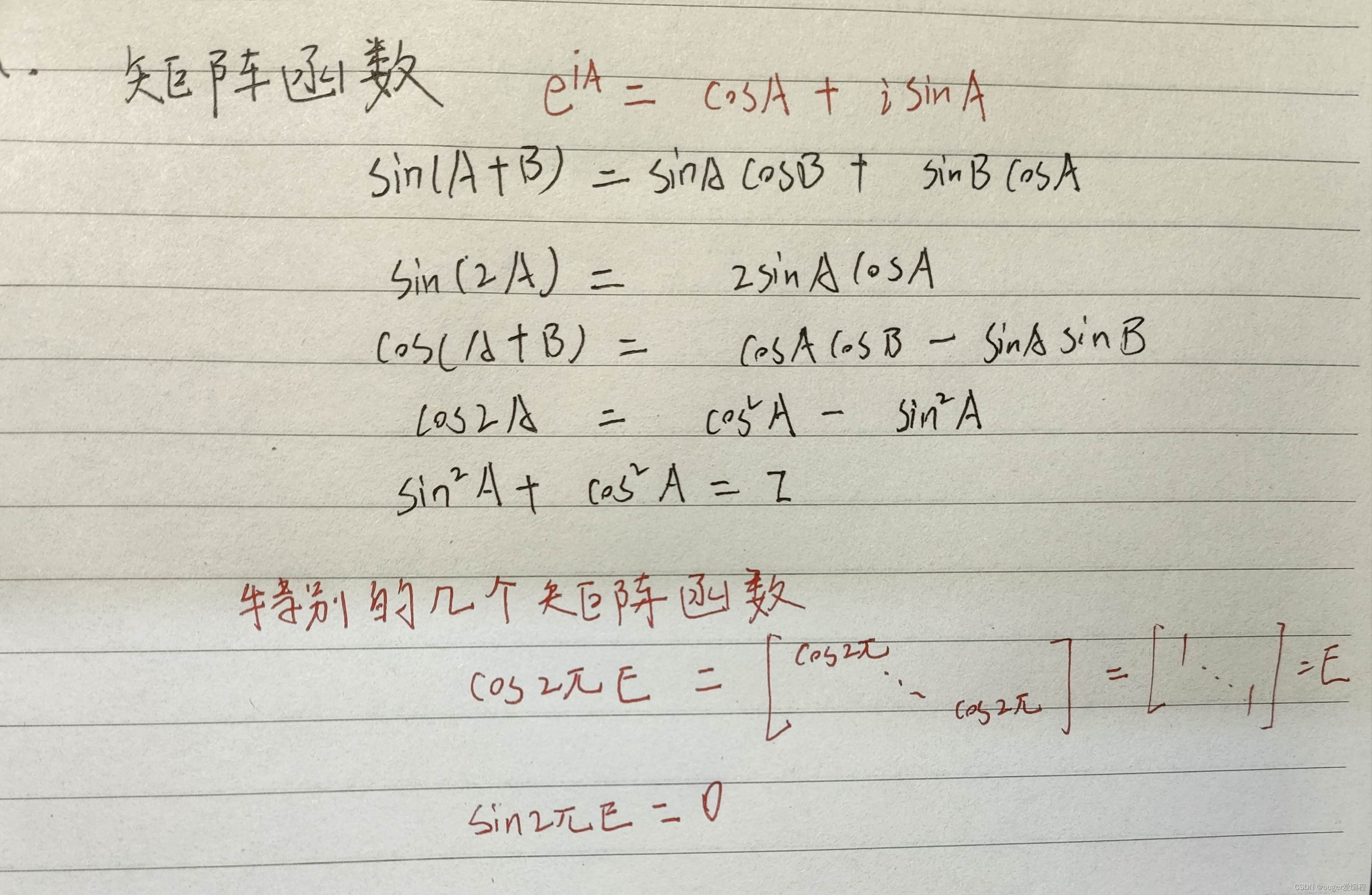
三角和指数矩阵函数
函数矩阵
会求导积分就行。