内涵
接触刚性环境任务下的机器人力控(阻抗)性能测试旨在评估机器人在与刚性物体交互时的性能表现。这种测试通过调整机器人的控制参数,如期望刚度和期望阻尼等,并分析记录的数据,旨在确保机器人能够在执行任务时保持良好的稳定性和适应性。这种测试不仅评估机器人在接触刚性物体时的控制精度和适应能力,还验证机器人在面对不同形状、尺寸和物理特性物体的鲁棒性,以及在突然外部干扰下的稳定性。通过这种测试,可以进一步优化机器人的控制策略和控制参数,从而提高机器人在接触刚性环境任务下的性能表现,确保机器人能够在实际应用中应对各种情况并发挥其最大的潜力。
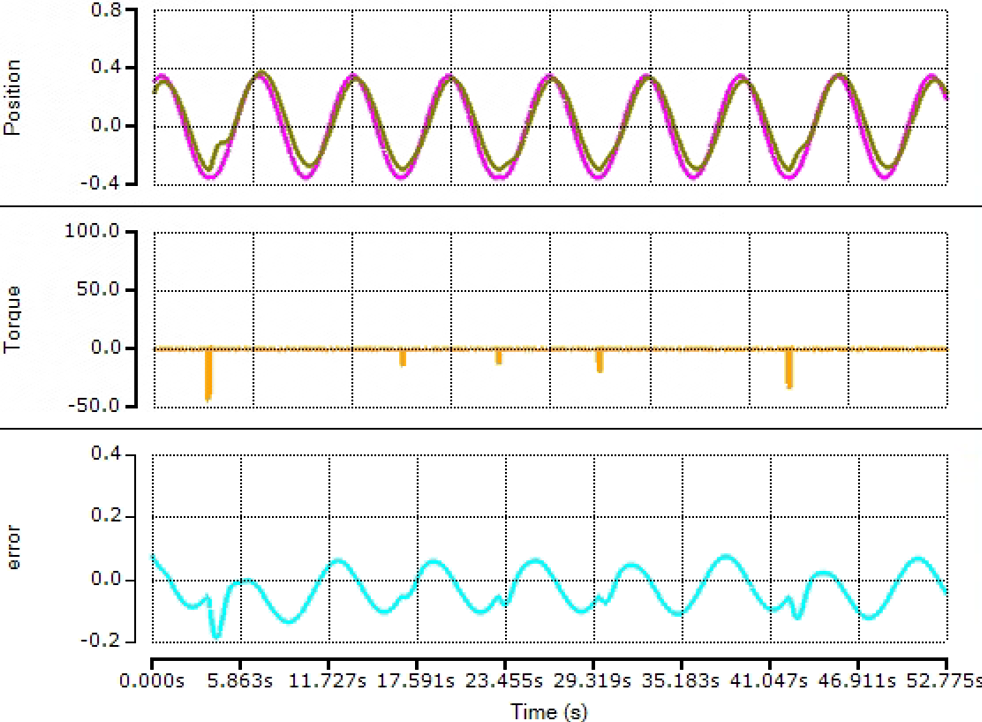
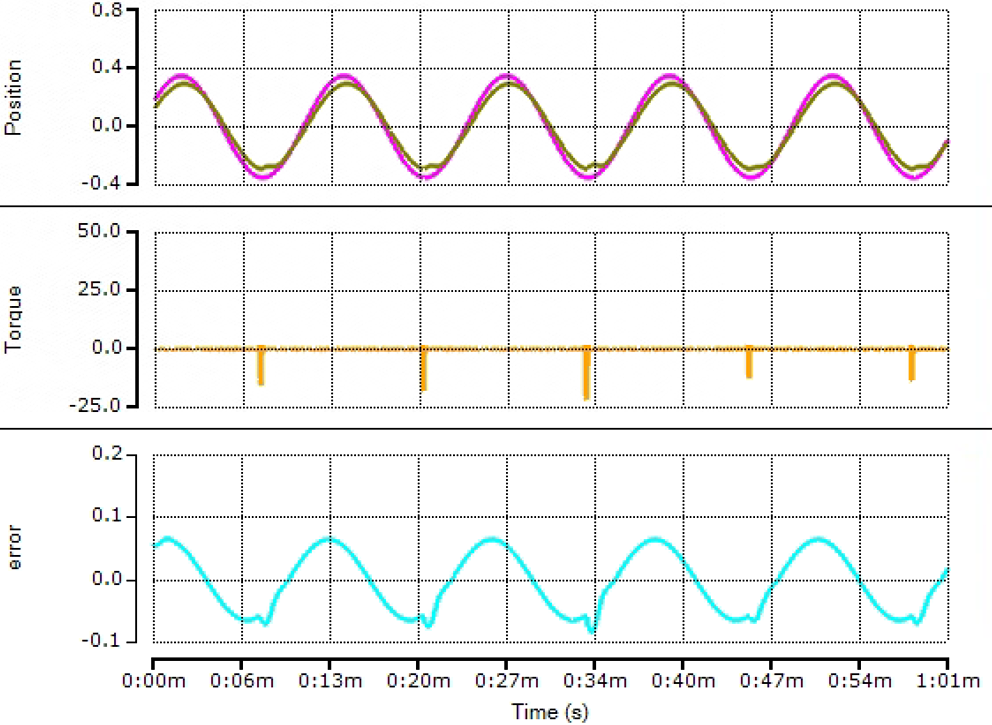
Kd100Bd50
![]()
1e4/(0.1*s^2+1*s+1)
首先测试自由空间中,重力补偿后的机器人运动数据变化:

在参考19°范围内变化。
接下来改变范围,参考20°范围变化。
Kd10Bd50
1e4/(0.1*s^2+1*s+1)
![]()
目标还是20°
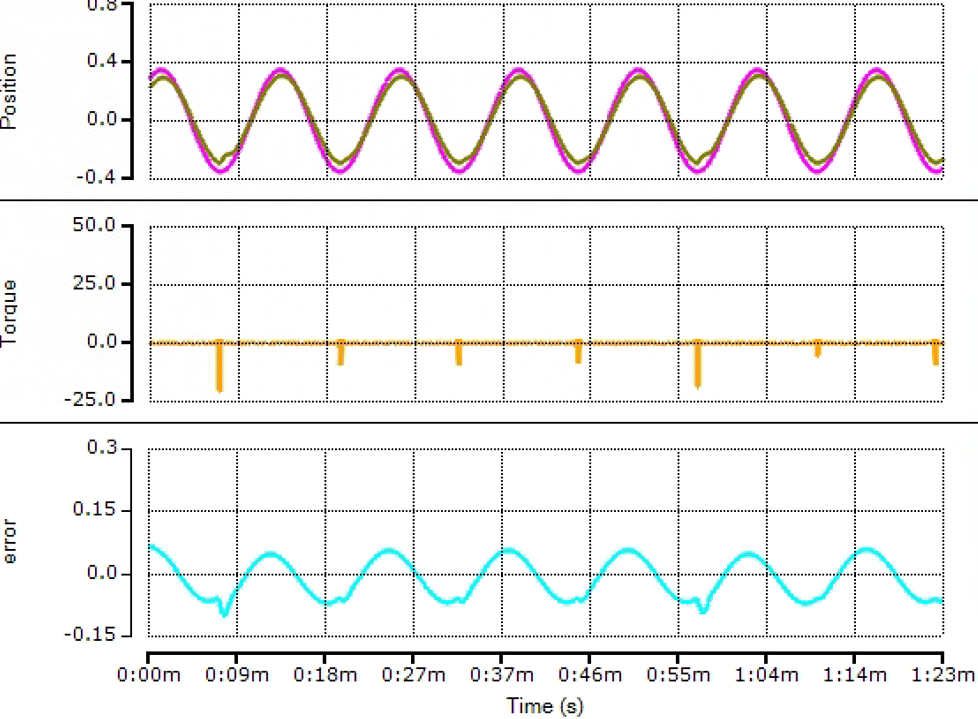

接下来改成20sint,之前是20sin0.5t