一、本文介绍
本文给大家带来的改进机制是利用今年新推出的AFPN(渐近特征金字塔网络)来优化检测头,AFPN的核心思想是通过引入一种渐近的特征融合策略,将底层、高层和顶层的特征逐渐整合到目标检测过程中。这种渐近融合方式有助于减小不同层次特征之间的语义差距,提高特征融合效果,使得检测模型能更好地适应不同层次的语义信息。本文在AFPN的结构基础上,为了适配YOLOv8改进AFPN结构,同时将AFPN融合到YOLOv8中(因为AFPN需要四个检测头,我们只有三个,下一篇文章我会出YOLOv8适配AFPN增加小目标检测头)实现暴力涨点。
推荐指数:⭐⭐⭐⭐
打星原因:为什么打四颗星是因为我觉得这个机制的计算量会上涨,这是扣分点,同时替换这个检测头刚开始前20个epochs的效果不好,随着轮次的增加涨幅才能体现出来,这也是扣分点,我给结构打分完全是客观的,并不是我推出的结构必须满分。
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备
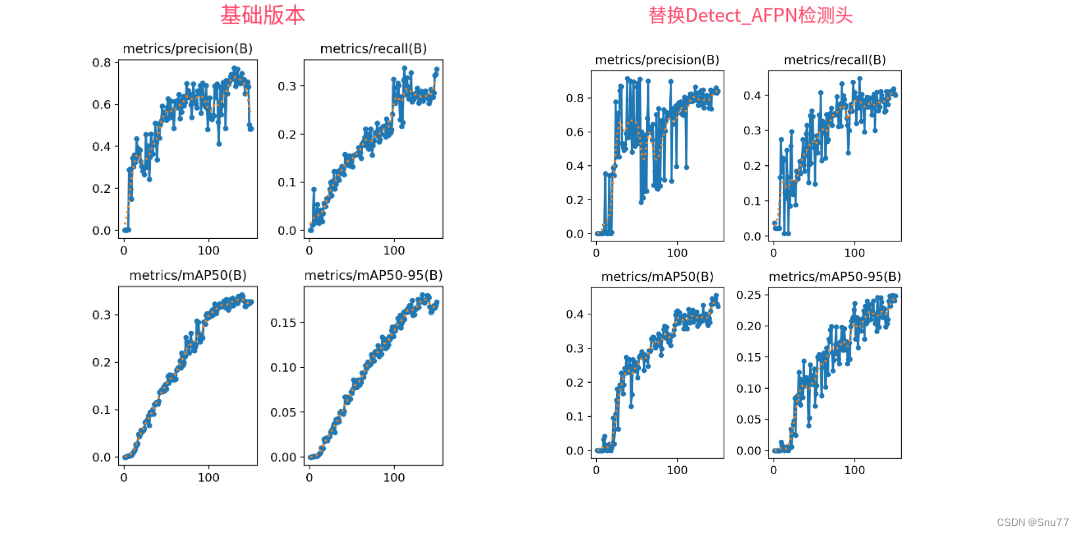
训练结果对比图->
这次试验我用的数据集大概有七八百张照片训练了150个epochs,虽然没有完全拟合但是效果有一定的涨点幅度,所以大家可以进行尝试毕竟不同的数据集上效果也可能差很多,同时我在后面给了多种yaml文件大家可以分别进行实验来检验效果。
目录
一、本文介绍
二、AFPN基本框架原理编辑
2.1 AFPN的基本原理
三、Detect_AFPN完整代码
四、手把手教你添加Detect_AFPN检测头
4.1 修改一
4.2 修改二
4.3 修改三
4.4 修改四
4.5 修改五
4.6 修改六
4.7 修改七
4.8 修改八
4.9 修改九
五、Detect_AFPN检测头的yaml文件
六、完美运行记录
七、本文总结
二、AFPN基本框架原理
论文地址:官方论文地址
代码地址:官方代码地址

2.1 AFPN的基本原理
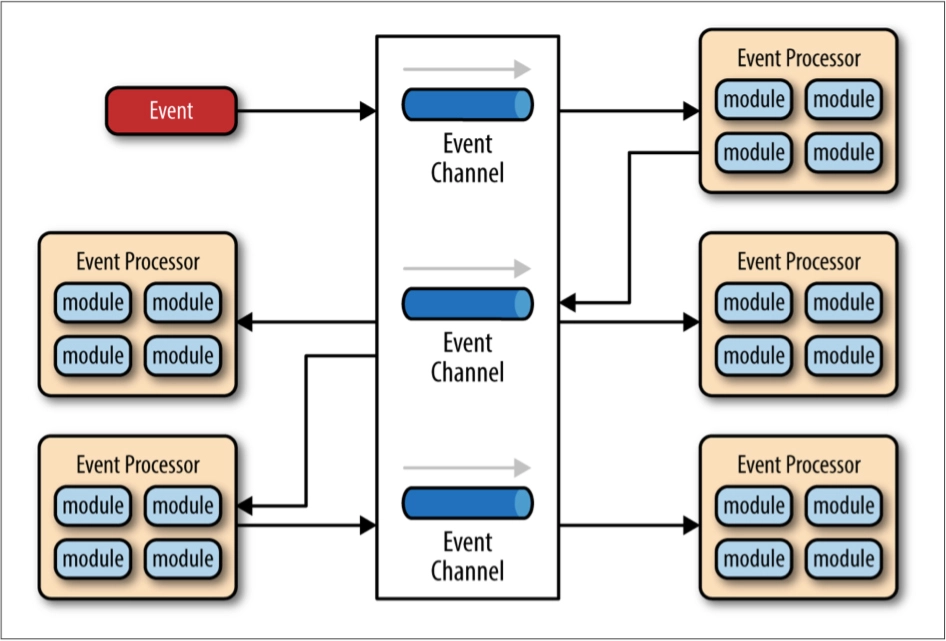
AFPN的核心思想是通过引入一种渐近的特征融合策略,将底层、高层和顶层的特征逐渐整合到目标检测过程中。这种渐近融合方式有助于减小不同层次特征之间的语义差距,提高特征融合效果,使得检测模型能更好地适应不同层次的语义信息。
主要改进机制:
1. 底层特征融合: AFPN通过引入底层特征的逐步融合,首先融合底层特征,接着深层特征,最后整合顶层特征。这种层级融合的方式有助于更好地利用不同层次的语义信息,提高检测性能。
2. 自适应空间融合: 引入自适应空间融合机制(ASFF),在多级特征融合过程中引入变化的空间权重,加强关键级别的重要性,同时抑制来自不同对象的矛盾信息的影响。这有助于提高检测性能,尤其在处理矛盾信息时更为有效。
3. 底层特征对齐: AFPN采用渐近融合的思想,使得不同层次的特征在融合过程中逐渐接近,减小它们之间的语义差距。通过底层特征的逐步整合,提高了特征融合的效果,使得模型更能理解和利用不同层次的信息。
个人总结:AFPN的灵感就像是搭积木一样,它不是一下子把所有的积木都放到一起,而是逐步地将不同层次的积木慢慢整合在一起。这样一来,我们可以更好地理解和利用每一层次的积木,从而构建一个更牢固的目标检测系统。同时,引入了一种智能的机制,能够根据不同情况调整注意力,更好地处理矛盾信息。

上面上AFPN的网络结构,可以看出从Backbone中提取出特征之后,将特征输入到AFPN中进行处理,然后它可以获得不同层级的特征进行融合,这也是它的主要思想质疑,同时将结果输入到检测头中进行预测。
(需要注意的是本文砍掉了最下面那一条线适应YOLOv8因为我们是三个检测头,下一篇文章我会出增加小目标检测头的然后四个头的yolov8改进,从而适应AFPN的结构)。
三、Detect_AFPN完整代码
这里代码是我对于2023年新提出的AFPN进行了修改然后适配YOLOv8的整体结构提出的检测头,本来该结构是四个检测头部分,但是我去除掉了一个从而适配yolov8,当然在我也在出一篇文章里会用到四头的(增加辅助训练头,针对小目标检测)讲解(要不然一个博客放不下 这么多代码)。
import math
from collections import OrderedDict
import torch
import torch.nn as nn
import torch.nn.functional as F
from ultralytics.nn.modules import DFL
from ultralytics.nn.modules.conv import Conv
from ultralytics.utils.tal import dist2bbox, make_anchors__all__ =['Detect_AFPN']def BasicConv(filter_in, filter_out, kernel_size, stride=1, pad=None):if not pad:pad = (kernel_size - 1) // 2 if kernel_size else 0else:pad = padreturn nn.Sequential(OrderedDict([("conv", nn.Conv2d(filter_in, filter_out, kernel_size=kernel_size, stride=stride, padding=pad, bias=False)),("bn", nn.BatchNorm2d(filter_out)),("relu", nn.ReLU(inplace=True)),]))class BasicBlock(nn.Module):expansion = 1def __init__(self, filter_in, filter_out):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(filter_in, filter_out, 3, padding=1)self.bn1 = nn.BatchNorm2d(filter_out, momentum=0.1)self.relu = nn.ReLU(inplace=True)self.conv2 = nn.Conv2d(filter_out, filter_out, 3, padding=1)self.bn2 = nn.BatchNorm2d(filter_out, momentum=0.1)def forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out += residualout = self.relu(out)return outclass Upsample(nn.Module):def __init__(self, in_channels, out_channels, scale_factor=2):super(Upsample, self).__init__()self.upsample = nn.Sequential(BasicConv(in_channels, out_channels, 1),nn.Upsample(scale_factor=scale_factor, mode='bilinear'))def forward(self, x):x = self.upsample(x)return xclass Downsample_x2(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x2, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 2, 2, 0))def forward(self, x, ):x = self.downsample(x)return xclass Downsample_x4(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x4, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 4, 4, 0))def forward(self, x, ):x = self.downsample(x)return xclass Downsample_x8(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x8, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 8, 8, 0))def forward(self, x, ):x = self.downsample(x)return xclass ASFF_2(nn.Module):def __init__(self, inter_dim=512):super(ASFF_2, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 2, 2, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :]out = self.conv(fused_out_reduced)return outclass ASFF_3(nn.Module):def __init__(self, inter_dim=512):super(ASFF_3, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_3 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 3, 3, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2, input3):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)level_3_weight_v = self.weight_level_3(input3)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v, level_3_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :] + \input3 * levels_weight[:, 2:, :, :]out = self.conv(fused_out_reduced)return outclass ASFF_4(nn.Module):def __init__(self, inter_dim=512):super(ASFF_4, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_0 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 3, 3, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input0, input1, input2):level_0_weight_v = self.weight_level_0(input0)level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)levels_weight_v = torch.cat((level_0_weight_v, level_1_weight_v, level_2_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input0 * levels_weight[:, 0:1, :, :] + \input1 * levels_weight[:, 1:2, :, :] + \input2 * levels_weight[:, 2:3, :, :]out = self.conv(fused_out_reduced)return outclass BlockBody(nn.Module):def __init__(self, channels=[64, 128, 256, 512]):super(BlockBody, self).__init__()self.blocks_scalezero1 = nn.Sequential(BasicConv(channels[0], channels[0], 1),)self.blocks_scaleone1 = nn.Sequential(BasicConv(channels[1], channels[1], 1),)self.blocks_scaletwo1 = nn.Sequential(BasicConv(channels[2], channels[2], 1),)self.downsample_scalezero1_2 = Downsample_x2(channels[0], channels[1])self.upsample_scaleone1_2 = Upsample(channels[1], channels[0], scale_factor=2)self.asff_scalezero1 = ASFF_2(inter_dim=channels[0])self.asff_scaleone1 = ASFF_2(inter_dim=channels[1])self.blocks_scalezero2 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone2 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.downsample_scalezero2_2 = Downsample_x2(channels[0], channels[1])self.downsample_scalezero2_4 = Downsample_x4(channels[0], channels[2])self.downsample_scaleone2_2 = Downsample_x2(channels[1], channels[2])self.upsample_scaleone2_2 = Upsample(channels[1], channels[0], scale_factor=2)self.upsample_scaletwo2_2 = Upsample(channels[2], channels[1], scale_factor=2)self.upsample_scaletwo2_4 = Upsample(channels[2], channels[0], scale_factor=4)self.asff_scalezero2 = ASFF_3(inter_dim=channels[0])self.asff_scaleone2 = ASFF_3(inter_dim=channels[1])self.asff_scaletwo2 = ASFF_3(inter_dim=channels[2])self.blocks_scalezero3 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone3 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.blocks_scaletwo3 = nn.Sequential(BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),)self.downsample_scalezero3_2 = Downsample_x2(channels[0], channels[1])self.downsample_scalezero3_4 = Downsample_x4(channels[0], channels[2])self.upsample_scaleone3_2 = Upsample(channels[1], channels[0], scale_factor=2)self.downsample_scaleone3_2 = Downsample_x2(channels[1], channels[2])self.upsample_scaletwo3_4 = Upsample(channels[2], channels[0], scale_factor=4)self.upsample_scaletwo3_2 = Upsample(channels[2], channels[1], scale_factor=2)self.asff_scalezero3 = ASFF_4(inter_dim=channels[0])self.asff_scaleone3 = ASFF_4(inter_dim=channels[1])self.asff_scaletwo3 = ASFF_4(inter_dim=channels[2])self.blocks_scalezero4 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone4 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.blocks_scaletwo4 = nn.Sequential(BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),)def forward(self, x):x0, x1, x2 = xx0 = self.blocks_scalezero1(x0)x1 = self.blocks_scaleone1(x1)x2 = self.blocks_scaletwo1(x2)scalezero = self.asff_scalezero1(x0, self.upsample_scaleone1_2(x1))scaleone = self.asff_scaleone1(self.downsample_scalezero1_2(x0), x1)x0 = self.blocks_scalezero2(scalezero)x1 = self.blocks_scaleone2(scaleone)scalezero = self.asff_scalezero2(x0, self.upsample_scaleone2_2(x1), self.upsample_scaletwo2_4(x2))scaleone = self.asff_scaleone2(self.downsample_scalezero2_2(x0), x1, self.upsample_scaletwo2_2(x2))scaletwo = self.asff_scaletwo2(self.downsample_scalezero2_4(x0), self.downsample_scaleone2_2(x1), x2)x0 = self.blocks_scalezero3(scalezero)x1 = self.blocks_scaleone3(scaleone)x2 = self.blocks_scaletwo3(scaletwo)scalezero = self.asff_scalezero3(x0, self.upsample_scaleone3_2(x1), self.upsample_scaletwo3_4(x2))scaleone = self.asff_scaleone3(self.downsample_scalezero3_2(x0), x1, self.upsample_scaletwo3_2(x2))scaletwo = self.asff_scaletwo3(self.downsample_scalezero3_4(x0), self.downsample_scaleone3_2(x1), x2)scalezero = self.blocks_scalezero4(scalezero)scaleone = self.blocks_scaleone4(scaleone)scaletwo = self.blocks_scaletwo4(scaletwo)return scalezero, scaleone, scaletwoclass AFPN(nn.Module):def __init__(self,in_channels=[256, 512, 1024, 2048],out_channels=128):super(AFPN, self).__init__()self.fp16_enabled = Falseself.conv0 = BasicConv(in_channels[0], in_channels[0] // 8, 1)self.conv1 = BasicConv(in_channels[1], in_channels[1] // 8, 1)self.conv2 = BasicConv(in_channels[2], in_channels[2] // 8, 1)# self.conv3 = BasicConv(in_channels[3], in_channels[3] // 8, 1)self.body = nn.Sequential(BlockBody([in_channels[0] // 8, in_channels[1] // 8, in_channels[2] // 8]))self.conv00 = BasicConv(in_channels[0] // 8, out_channels, 1)self.conv11 = BasicConv(in_channels[1] // 8, out_channels, 1)self.conv22 = BasicConv(in_channels[2] // 8, out_channels, 1)# self.conv33 = BasicConv(in_channels[3] // 8, out_channels, 1)# init weightfor m in self.modules():if isinstance(m, nn.Conv2d):nn.init.xavier_normal_(m.weight, gain=0.02)elif isinstance(m, nn.BatchNorm2d):torch.nn.init.normal_(m.weight.data, 1.0, 0.02)torch.nn.init.constant_(m.bias.data, 0.0)def forward(self, x):x0, x1, x2 = xx0 = self.conv0(x0)x1 = self.conv1(x1)x2 = self.conv2(x2)# x3 = self.conv3(x3)out0, out1, out2 = self.body([x0, x1, x2])out0 = self.conv00(out0)out1 = self.conv11(out1)out2 = self.conv22(out2)return out0, out1, out2class Detect_AFPN(nn.Module):"""YOLOv8 Detect head for detection models."""dynamic = False # force grid reconstructionexport = False # export modeshape = Noneanchors = torch.empty(0) # initstrides = torch.empty(0) # initdef __init__(self, nc=80, channel=256, ch=()):"""Initializes the YOLOv8 detection layer with specified number of classes and channels."""super().__init__()self.nc = nc # number of classesself.nl = len(ch) # number of detection layersself.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)self.no = nc + self.reg_max * 4 # number of outputs per anchorself.stride = torch.zeros(self.nl) # strides computed during buildc2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], min(self.nc, 100)) # channelsself.cv2 = nn.ModuleList(nn.Sequential(Conv(channel, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch)self.cv3 = nn.ModuleList(nn.Sequential(Conv(channel, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch)self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()self.AFPN = AFPN(ch, channel)def forward(self, x):"""Concatenates and returns predicted bounding boxes and class probabilities."""x = list(self.AFPN(x))shape = x[0].shape # BCHWfor i in range(self.nl):x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1)if self.training:return xelif self.dynamic or self.shape != shape:self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))self.shape = shapex_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV opsbox = x_cat[:, :self.reg_max * 4]cls = x_cat[:, self.reg_max * 4:]else:box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.stridesif self.export and self.format in ('tflite', 'edgetpu'):# Normalize xywh with image size to mitigate quantization error of TFLite integer models as done in YOLOv5:# https://github.com/ultralytics/yolov5/blob/0c8de3fca4a702f8ff5c435e67f378d1fce70243/models/tf.py#L307-L309# See this PR for details: https://github.com/ultralytics/ultralytics/pull/1695img_h = shape[2] * self.stride[0]img_w = shape[3] * self.stride[0]img_size = torch.tensor([img_w, img_h, img_w, img_h], device=dbox.device).reshape(1, 4, 1)dbox /= img_sizey = torch.cat((dbox, cls.sigmoid()), 1)return y if self.export else (y, x)def bias_init(self):"""Initialize Detect() biases, WARNING: requires stride availability."""m = self # self.model[-1] # Detect() module# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequencyfor a, b, s in zip(m.cv2, m.cv3, m.stride): # froma[-1].bias.data[:] = 1.0 # boxb[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
四、手把手教你添加Detect_AFPN检测头
这里教大家添加检测头,检测头的添加相对于其它机制来说比较复杂一点,修改的地方比较多。
具体更多细节可以看我的添加教程博客,下面的教程也是完美运行的,看那个都行具体大家选择。
添加教程->YOLOv8改进 | 如何在网络结构中添加注意力机制、C2f、卷积、Neck、检测头
4.1 修改一
首先我们将上面的代码复制粘贴到'ultralytics/nn/modules' 目录下新建一个py文件复制粘贴进去,具体名字自己来定,我这里起名为AFPN.py。

4.2 修改二
我们新建完上面的文件之后,找到如下的文件'ultralytics/nn/tasks.py'。这里需要修改的地方有点多,总共有7处,但都很简单。首先我们在该文件的头部导入我们AFPN文件中的检测头。

4.3 修改三
找到如下的代码进行将检测头添加进去,这里给大家推荐个快速搜索的方法用ctrl+f然后搜索Detect然后就能快速查找了。

4.4 修改四
同理将我们的检测头添加到如下的代码里。

4.5 修改五
同理

4.6 修改六
同理

4.7 修改七
同理

4.8 修改八
这里有一些不一样,我们需要加一行代码
else:return 'detect'为啥呢不一样,因为这里的m在代码执行过程中会将你的代码自动转换为小写,所以直接else方便一点,以后出现一些其它分割或者其它的教程的时候在提供其它的修改教程。

4.9 修改九
这里也有一些不一样,需要自己手动添加一个括号,提醒一下大家不要直接添加,和我下面保持一致。

五、Detect_AFPN检测头的yaml文件
这个代码的yaml文件和正常的对比也需要修改一下,如下->
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, C2f, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect_AFPN, [nc, 256]] # Detect(P3, P4, P5)
六、完美运行记录
最后提供一下完美运行的图片。

七、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv8改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备



![C++[面向对象的程序设计]_基础入门(中)(万字总结)(建议收藏!!!)](https://img-blog.csdnimg.cn/direct/3b292d9d119a488584ab0f09d47cb26b.png)



