💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
对于无人驾驶汽车的列车定位问题,量子粒子滤波(Quantum Particle Filter)是基于量子理论和粒子滤波方法的一种新型定位算法。它使用量子粒子来近似表示目标状态的概率分布,并通过观测数据进行权重更新和重采样,实现对无人驾驶汽车位置的准确估计。
虽然目前关于量子粒子滤波在无人驾驶汽车列车定位方面的研究还比较有限,但以下是一篇相关的研究论文可以提供一些参考:
Liang, H., Li, K., Hao, Y., & Xiao, M. (2020). Quantum-Inspired Particle Filter for Train Localization in Unmanned Vehicle. IEEE Transactions on Intelligent Transportation Systems, 21(6), 2545-2555.
这篇论文提出了一种基于量子粒子滤波的方法,用于无人驾驶汽车列车的定位问题。研究人员将量子理论引入粒子滤波器中,通过定义量子粒子的状态和量子测量操作,实现对车辆位置的估计。研究结果表明,这种基于量子粒子滤波的定位方法在无人驾驶汽车列车定位中具有较高的精度和鲁棒性。
请注意,该领域的研究还处于初级阶段,因此可能还没有太多的中文文献可供参考。如果需要更全面的资料,建议查阅相关国际期刊和会议论文,以获取更多关于量子粒子滤波在无人驾驶汽车列车定位方面的研究信息。
本文量子或基线粒子的中心可以在黎曼-罗巴切夫斯基或欧几里得空间中计算。利用分数母能量透视计算左右量子自旋粒子在2D表面上的运动中心,用于无人车控制,可扩展到3D或更高维空间。
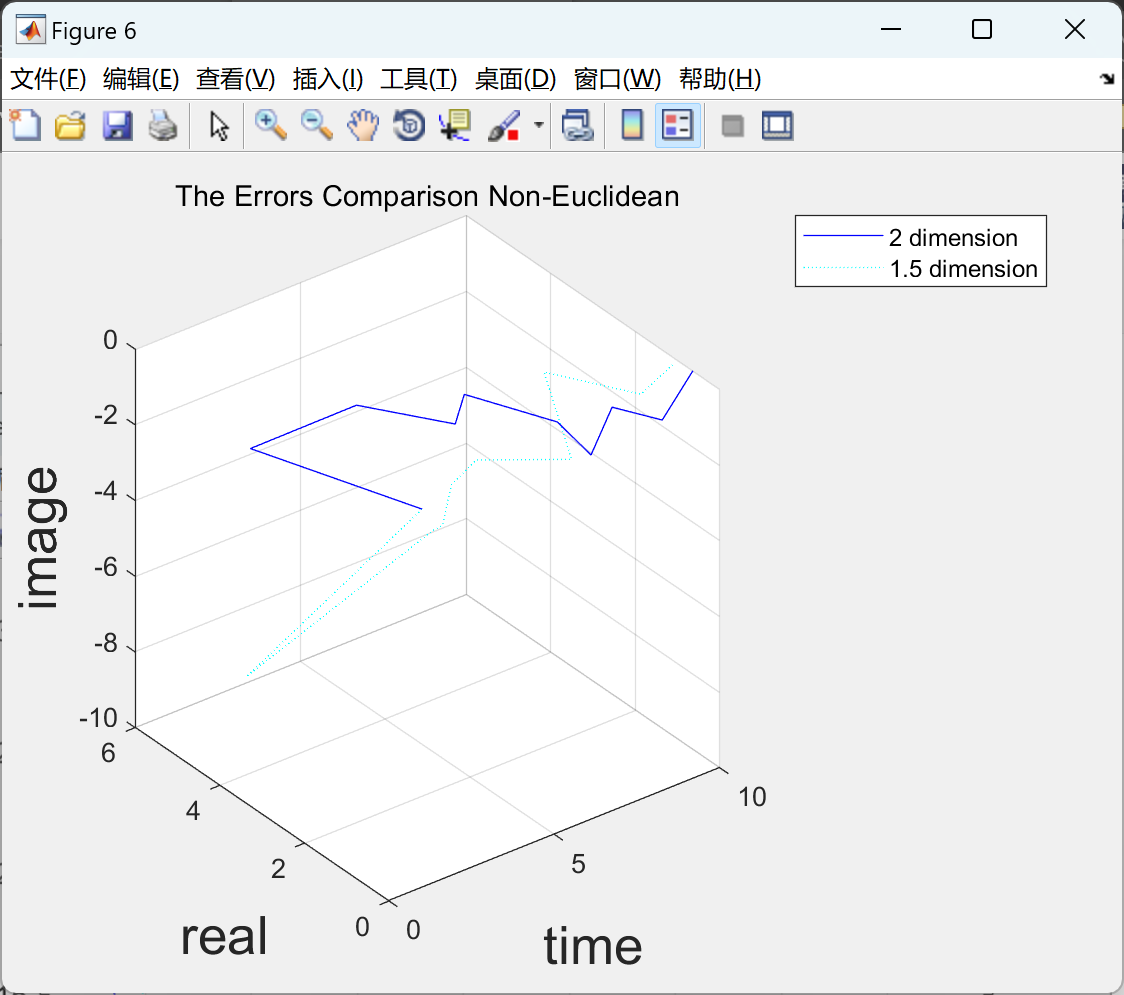
📚2 运行结果





部分代码:
figure(2);
set(gca,'FontSize',12);
clf;
hold on
plot(X(1, k), X(2, k), 'r.', 'markersize',50); % System status
axis([0 100 0 100]);
plot(P(1, :), P(2, :), 'k.', 'markersize',5); % Particle position
plot(PCenter(1, k), PCenter(2, k), 'b.', 'markersize',25); % Center
legend('True State', 'Particle', 'Center of Particles');
xlabel('x', 'FontSize', 20); ylabel('y', 'FontSize', 20);
title('Real Gaussian Errors');
grid;
hold off
pause(0.5);
end
%% 1.5 dimension quantum space
P = P_init; % Particle starts off
% Jumps now
for k = 2 : T
% Prediction
for i = 1 : N
P(:, i) = P(:, i) + distance * [-cos(k * theta); sin(k * theta)] + wgn(2, 1, 10*log10(Q));
end
% Find the center,direction of moving
center = sum(P, 2) / N; % Center of particle
path = Z(:, k) - Z(:, k-1); % Vector of path
pathAngle = atan2(path(2, 1), path(1, 1)); % Direction of moving
% Initialization of extra parameters
PLeft = zeros(2, N); % Left party members
PRight = zeros(2, N); % Right party members
WLeft = zeros(N, 1); % Weight of left
WRight = zeros(N, 1); % Weight of right
ILeft = 1;
IRight = 1;
% Particles are divided into either of left spin party or right spin party
for i = 1 : N
% Space transformation, driver's moving view, counter-clock wise,0~2pi
path = P(:, i) - center;
partiAngle = atan2(path(2, 1), path(1, 1)); % Angle towards the particle center
wAngle = mod(partiAngle - pathAngle + 2*pi, 2*pi);
% 0~pi belongs to left pi~2*pi belongs to right
if wAngle > 0 && wAngle <= pi
PLeft(:, ILeft) = P(:, i);
dist = norm(PLeft(:, ILeft)-Z(:, k)); % Left distance to the observer
WLeft(ILeft) = (1 / sqrt(R) / sqrt(2 * pi)) * exp(-(dist)^1.5 / 1.5 / R); % Left quantum weight
ILeft = ILeft + 1;
else
PRight(:, IRight) = P(:, i);
dist = norm(PRight(:, IRight)-Z(:, k)); % Right distance to the observer
WRight(IRight) = (1 / sqrt(R) / sqrt(2 * pi)) * exp(-(dist)^1.5 / 1.5 / R); % Right quantum weight
IRight = IRight + 1;
end
end
CLeft = ILeft - 1;
CRight = IRight - 1;
% Left spin normalization
wsum = sum(WLeft);
for i = 1 : CLeft
WLeft(i) = WLeft(i) / wsum;
end
% Left resampling
for i = 1 : CLeft
wmax = 2 * max(WLeft) * rand; % Use the same rule as baseline
index = randi(CLeft, 1);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Liang, H., Li, K., Hao, Y., & Xiao, M. (2020). Quantum-Inspired Particle Filter for Train Localization in Unmanned Vehicle. IEEE Transactions on Intelligent Transportation Systems, 21(6), 2545-2555.