STM32单片机项目实例:基于TouchGFX的智能手表设计(5)硬件驱动层程序设计
目录
一、 概述
二、 新建工程与外设配置
三、 TouchGFX配置
四、 增加TouchGFX关键驱动
一、 概述
本文内容主要进行工程新建,硬件外设的配置以及添加TouchGFX的屏幕、触摸NorFlash驱动,主要以流程为主。
二、 新建工程与外设配置
新建工程,选择STM32U575RIT6,弹出的TrustZone选项,选择without TrustZone activated。

Project Manager页面,设置工程名:0C-1_STM32U575_Hardware_Basic,选择工程路径,工具链选择MDK-ARM,设置堆栈大小0x1200,Code Generator页面,Copy only the…,Generate peripheral initialization as a pair…,


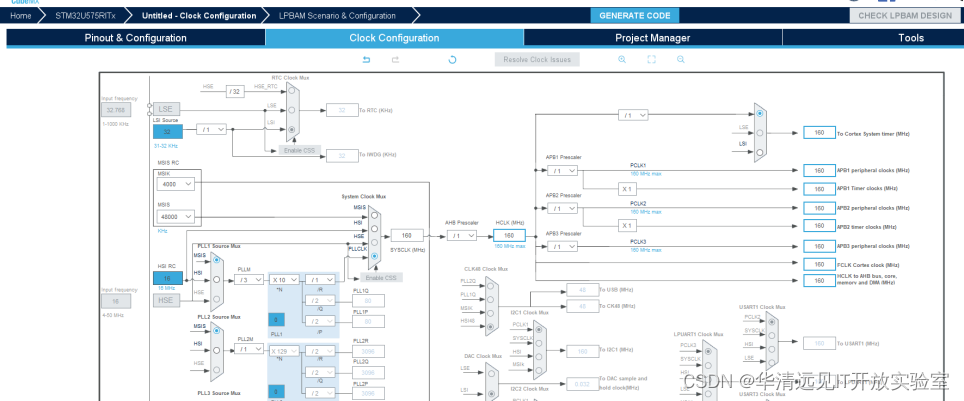
Clock Configuration页面,系统时钟选择PLLCK输出,在HCLK框输入160后回车,设置系统时钟频率为160MHz。
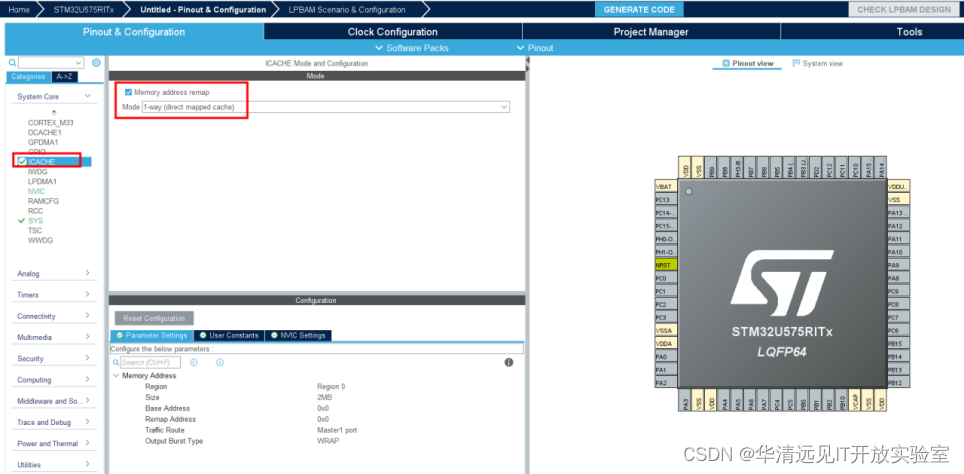
Pinout & Configuration 页面,System Core栏中的ICACHE进行设置。
Pinout & Configuration 页面,System Core栏中的RCC进行设置,HSE与LSE设置位晶体谐振器。
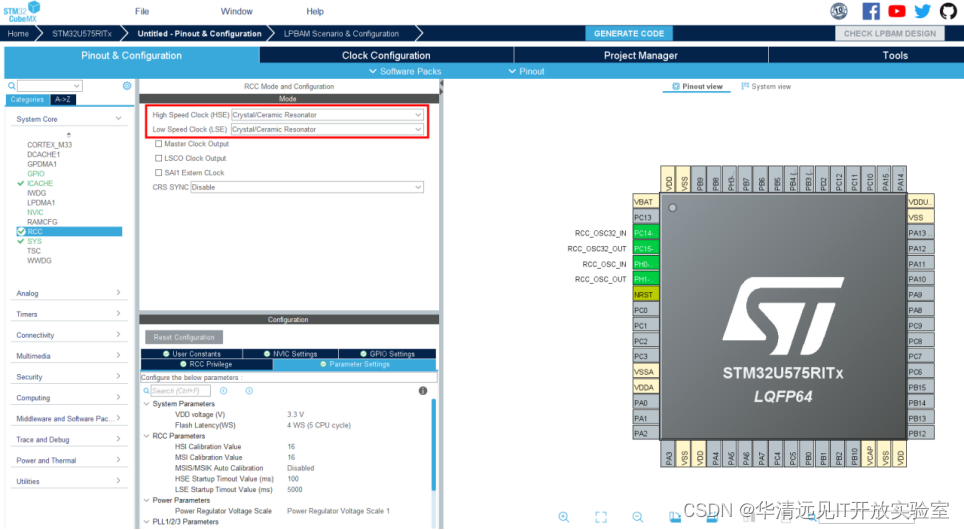
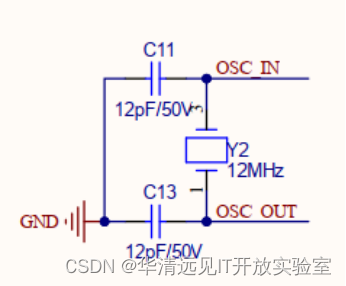
返回至Clock Configuration页面,HSE的外部输入频率设置为12。
Pinout & Configuration 页面,Connectivity栏中设置SPI屏幕接口,I2C触摸接口,外部存储器的QSPI接口,UART调试端口,WiFi模组的通信口(UART)。首先是屏幕的SPI接口,设置全双工主机,按住ctrl,光标移动到PA1端口,点击左键拖拽SPI1_SCK至PA5,并将PA6/PA7右键Signal Pinning进行端口锁定。

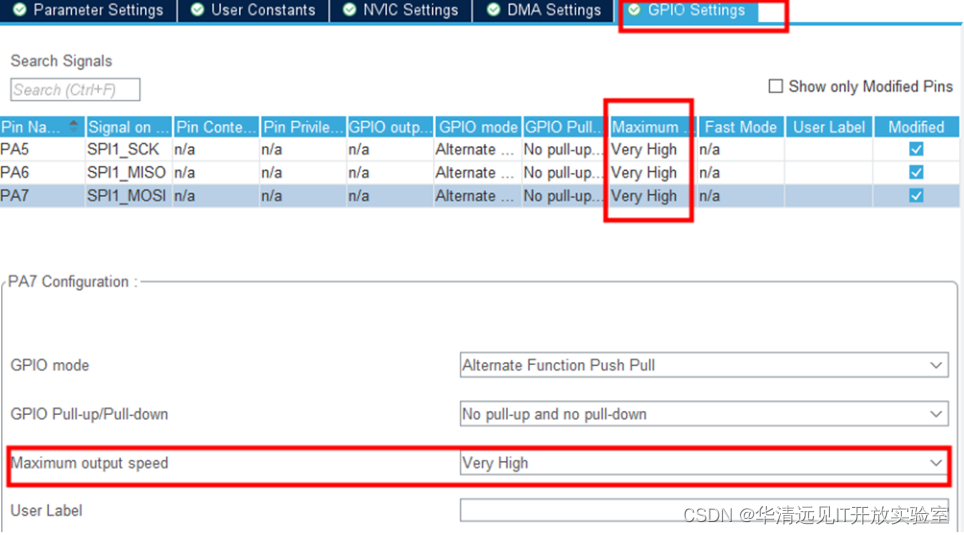
在SPI1的Parameter Settings栏中,设置Data Size:8,Prescaler(for Baud Rate):4。
 在GPIO Settings中将PA5、PA6、PA7的Maximum outut speed设置为Very Hight。
在GPIO Settings中将PA5、PA6、PA7的Maximum outut speed设置为Very Hight。
 返回到System Core栏中的GPIO,对显示屏的控制引脚以及按键、LED灯与蜂鸣器进行设置。设置PA4为超高速PP输出,修改用户标签为LCD_DCX;设置PB10为低速PP输出,初始电平为高,修改用户标签为LCD_BL;设置PA8为高速PP输出,修改用户标签为LCD_RST;设置PA12为下降沿触发,修改用户标签为USER_KEY;设置PA15为低速PP输出,修改用户标签为RUN-BEEP;设置PC13为低速PP输出,修改用户标签为BLUE_LED。
返回到System Core栏中的GPIO,对显示屏的控制引脚以及按键、LED灯与蜂鸣器进行设置。设置PA4为超高速PP输出,修改用户标签为LCD_DCX;设置PB10为低速PP输出,初始电平为高,修改用户标签为LCD_BL;设置PA8为高速PP输出,修改用户标签为LCD_RST;设置PA12为下降沿触发,修改用户标签为USER_KEY;设置PA15为低速PP输出,修改用户标签为RUN-BEEP;设置PC13为低速PP输出,修改用户标签为BLUE_LED。

对Connectivity栏中I2C1接口设置为I2C,按住ctrl,光标移动到PA3端口,点击左键拖拽I2C1_SDA至PB7,并将PB6/PB7右键Signal Pinning进行端口锁定。修改I2C Speed Mode为Fast Mode。

返回到System Core栏中的GPIO,对触摸屏的控制引脚以进资源扩展板的外设行设置。设置PA0为双边沿触发,修改用户标签为EXT-FIVEKEY;设置PC6为低速PP输出,修改用户标签为EXT-FAN;设置PC6为低速PP输出,修改用户标签为EXT-MOTOR;设置PA11为低速PP输出,修改用户标签为TP_RST;设置PA12为下降沿触发,修改用户标签为USER_KEY;设置PB5为双边沿触发,修改用户标签为TP_INT。
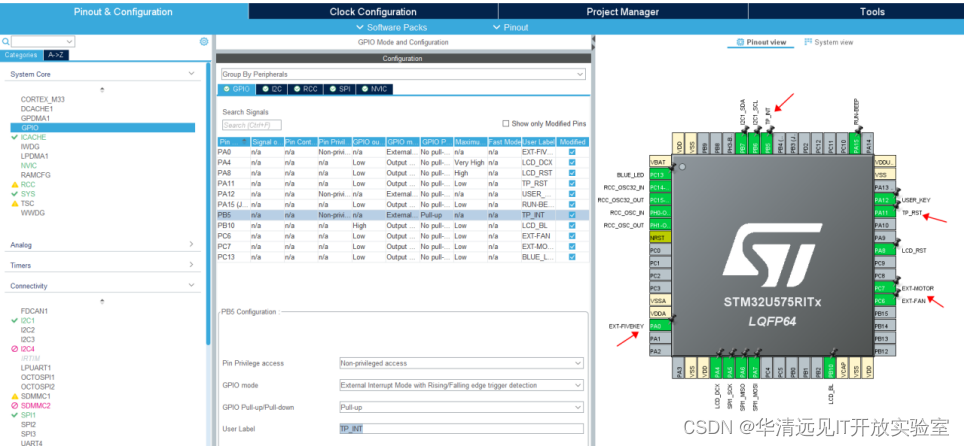
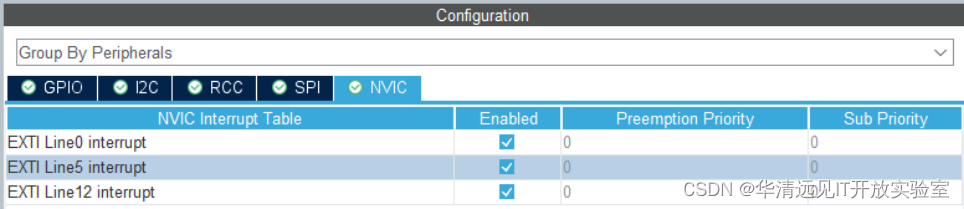
在NVIC中勾选EXTI Line0/ EXTI Line5全局中断使能。
对Connectivity栏中OCTOSPI1接口设置模式为Quad SPI,Clock选择Port1 CLK,Chip Select选择Port1 NCS,Data[3:0]选择Port1 IO[7:0];设置Fifo Threshold为8,Device Size为24,Clock Prescaler为2,Sample Shiting为Half Cycle。右键将PC0、PC1、PC2、PC3、PA2、PA3固定。

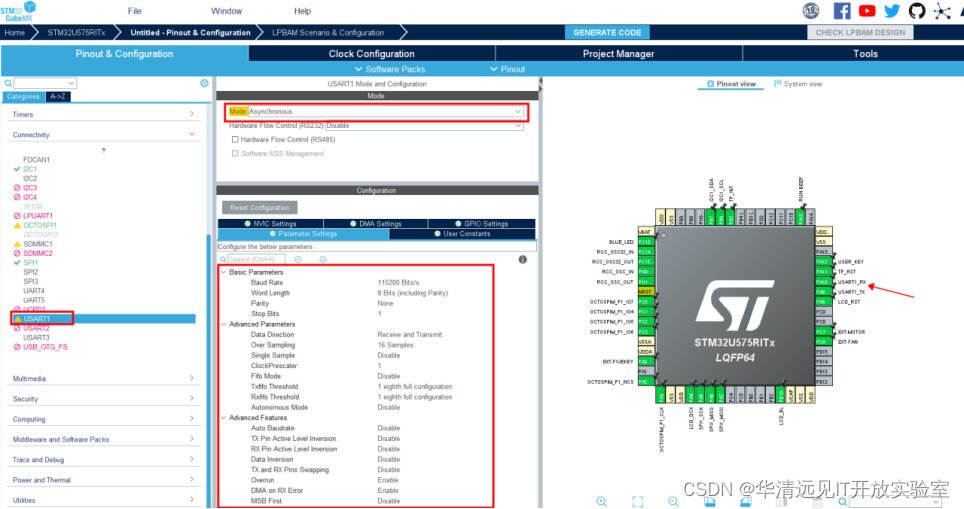
对Connectivity栏中USART1进行设置,mode设置Asynchronous,并锁定PA9与PA10。
对Connectivity栏中UART5进行设置,mode设置Asynchronous,并锁定PD2与PC12。
 在NVIC Settings中勾选UART5全局中断使能。
在NVIC Settings中勾选UART5全局中断使能。

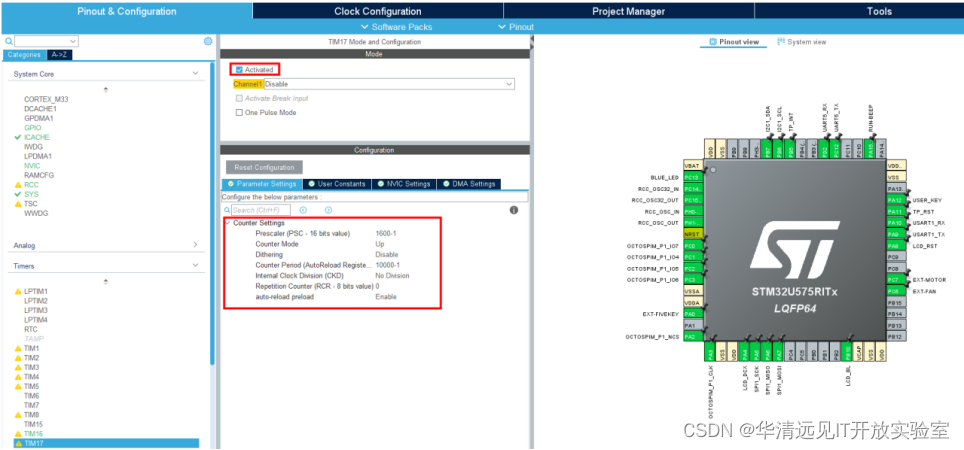
对Timers进行设置,TIM16/TIM17分别设置5ms与100ms的中断,用于任务的触发管理。
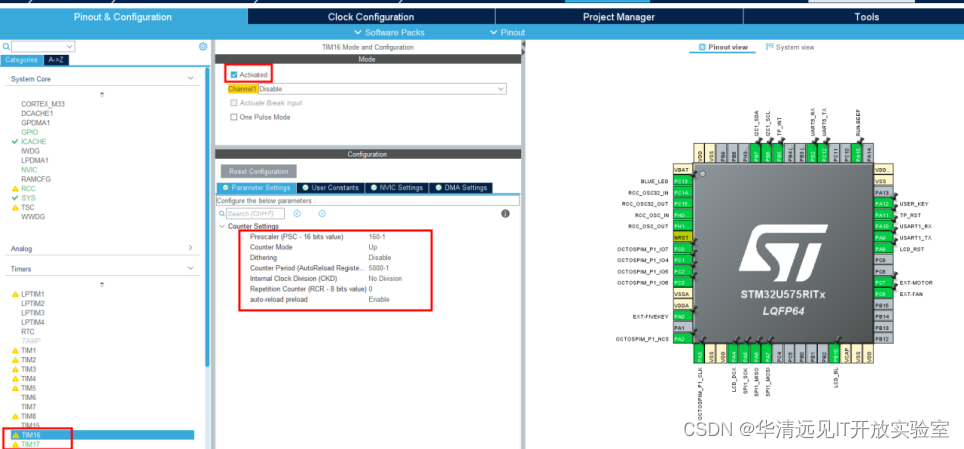
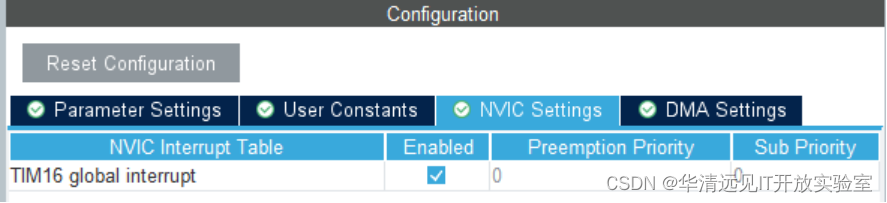
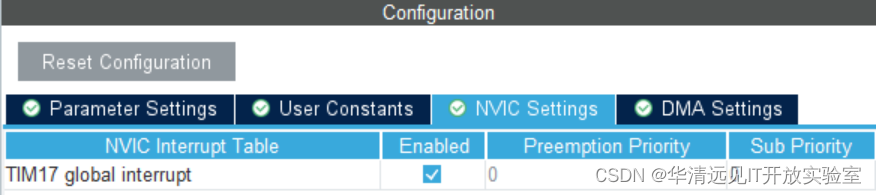
在NVIC Settings中勾选TIM16全局中断使能。
对Timers栏中的RTC进行设置

对Analog栏中的ADC1进行设置,通道6、通道15、通道16设置为单端转换,开启内部的VBAT、VREF以及芯片内部温度测量。

ADC参数设置一栏,设置时钟分频÷4,采样精度12位,Enable Regular Conversions进行使能,通道数量6,连续扫描模式使能,Rank1、Rank2、Rank3、Rank4、Rank5、Rank6分别对应通道6,通道15,通道16,内部温度,参考电压以及VBAT电压测量,采样时间设置为391.5Cycles。启动DMA循环模式。


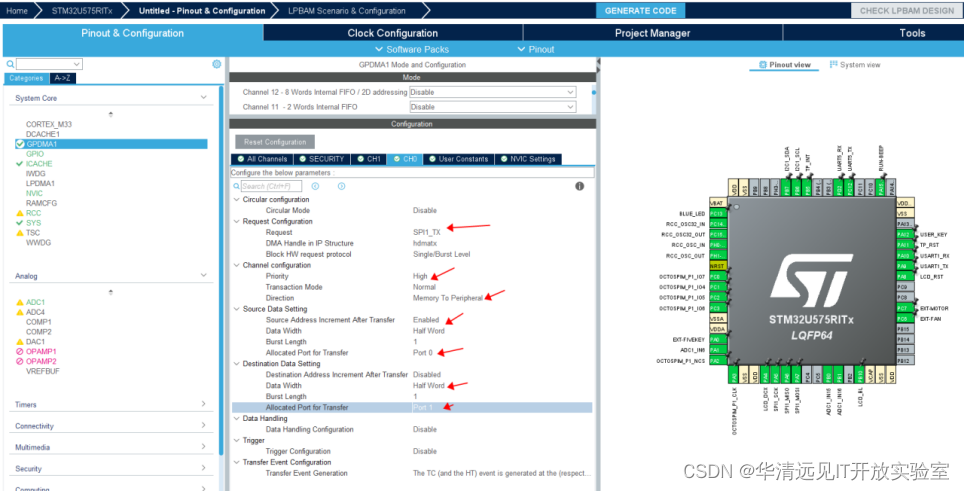
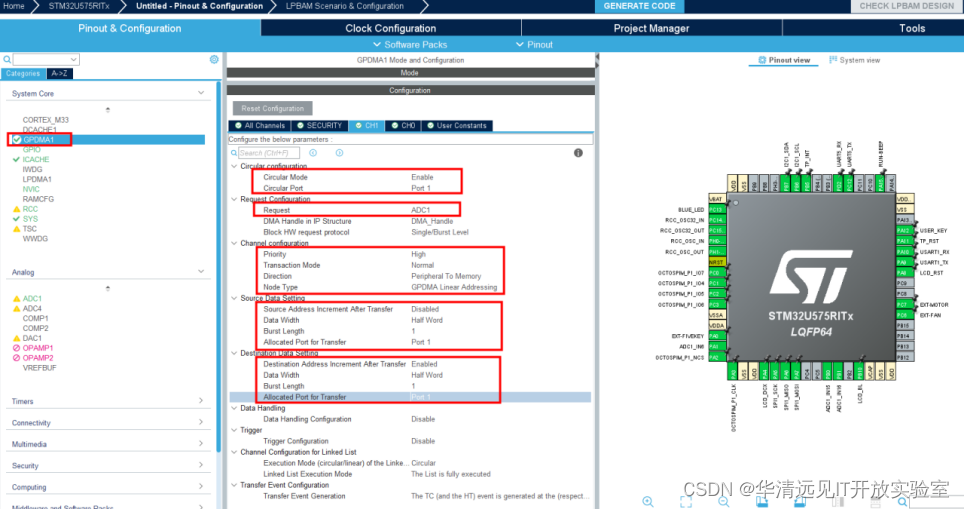
在System Core栏中对GPDMA进行设置,通道0与通道1设置位标准请求模式,通道0用于屏幕数据刷新,通道1用于外部存储器的读写。

CH0的请求采用SPI1_TX,通道配置的优先级高,传输模式正常,传输方向内存到外设,源端地址自增使能,采用半字传输,目标地址自增禁止,半字传输,目标端口设置为1。
CH1采用循环模式,端口选则Port1,请求采用ADC1,通道配置的优先级高,传输模式正常,传输方向外设到内存,源端地址自增禁用,采用半字传输,源端端口设置Port1;目标地址自增使能,半字传输,目标端口设置为Port1。
在System Core栏中对NVIC的优先级进行设置。

点击右上角的GENERATR CODE,等待完成生成工程配置。
三、 TouchGFX配置
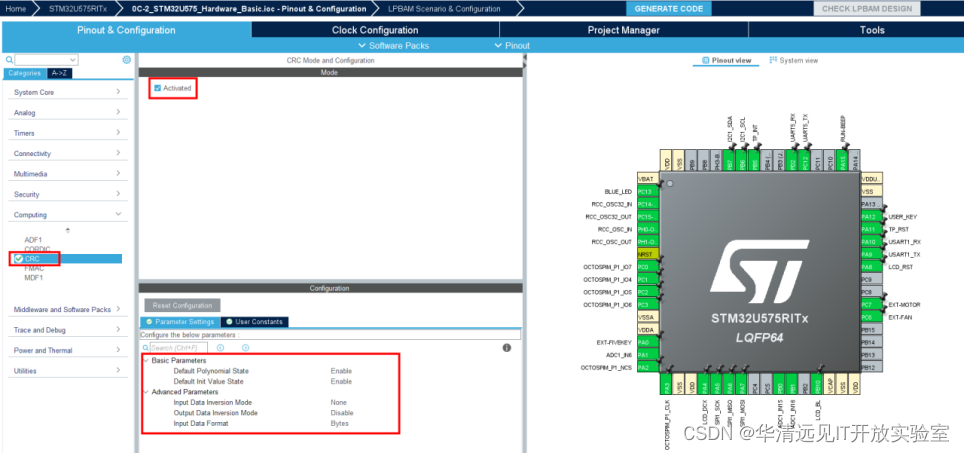
对Computing栏中的CRC进行设置。
对Middleware and Software Packs中的X-CUBE-TOUCHGFX进行选择4.21.2版本。
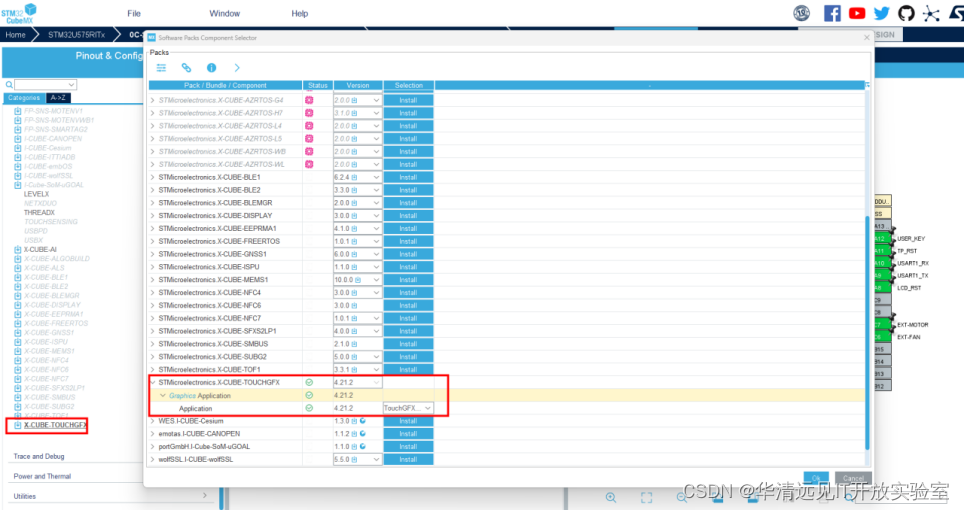
对Middleware and Software Packs中的X-CUBE-TOUCHGFX图形应用进行勾选。采用单缓冲,设置宽度320与高度240。

点击右上角的GENERATR CODE,等待完成生成工程配置。生成配置后的代码,编译会报错,需要打开TouchGFX 4.21.2 Designer软件进行一次配置与GUI代码的生成(注意工程路径中不能包含非法字符,空格也不可以…)。
打开…\0C-2_STM32U575_Hardware_Basic\TouchGFX下的ApplicationTemplate.touchgfx.part,点击右下角的</>生成代码。

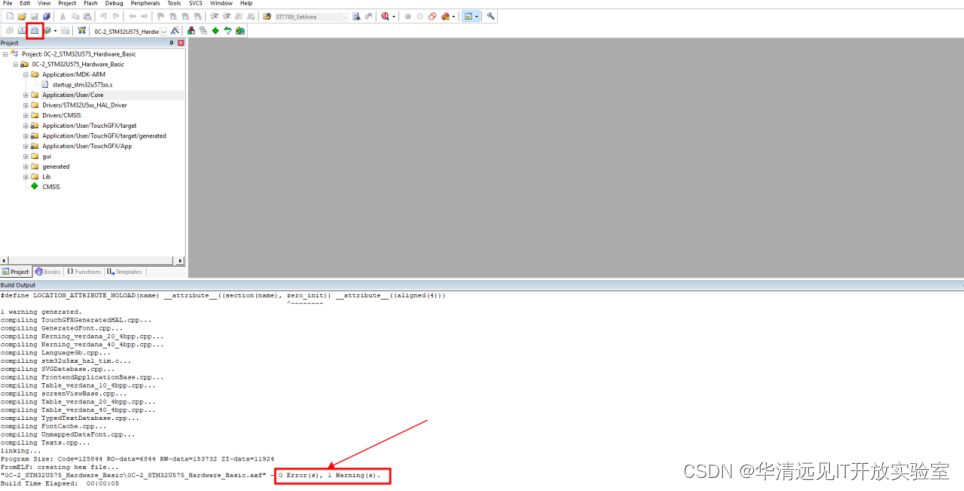
打开…\0C-2_STM32U575_Hardware_Basic\MDK-ARM下的0C-2_STM32U575_Hardware_Basic.uvprojx,点击全编译,编译0错误,1警告(可忽略该警告)。
四、 增加TouchGFX关键驱动
将资料光盘中..\FS-STM32U575-WATCH(Release)\Drivers文件夹下的efsm-master、MAX30102_Maxim、Motion_Driver三个文件夹拷贝至新建工程目录..\0C-2_STM32U575_Hardware_Basic\Drivers下。

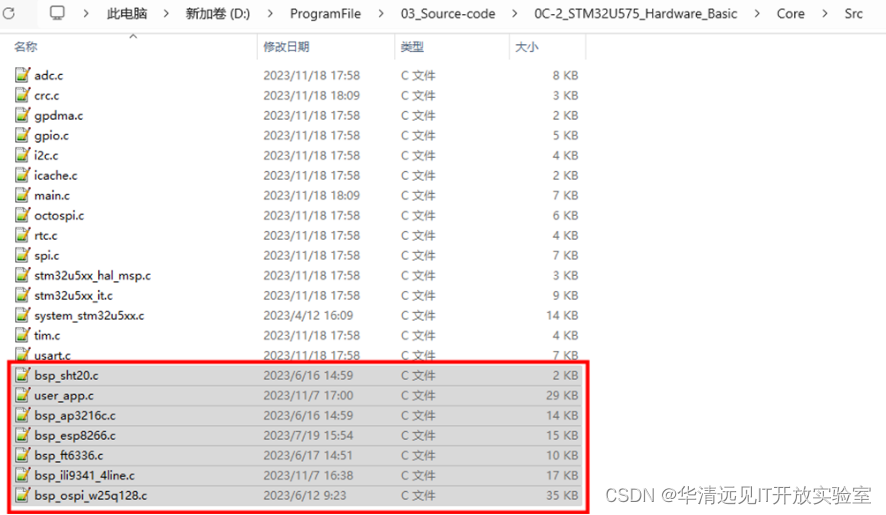
将资料光盘中.. \FS-STM32U575-WATCH(Release)\Core\Src文件夹下的bsp_ap3216c.c、bsp_esp8266.c、bsp_ft6336.c、bsp_ili9341_4line.c、bsp_ospi_w25q128.c、bsp_sht20.c、user_app.c拷贝至新建工程目录..\0C-2_STM32U575_Hardware_Basic\Core\Src下。
将资料光盘中.. \FS-STM32U575-WATCH(Release)\Core\Irc文件夹下的bsp_ap3216c.h、bsp_esp8266.h、bsp_ft6336.h、bsp_ili9341_4line.h、bsp_ospi_w25q128.h、bsp_sht20.h、user_app.h拷贝至新建工程目录..\0C-2_STM32U575_Hardware_Basic\Core\Irc下。

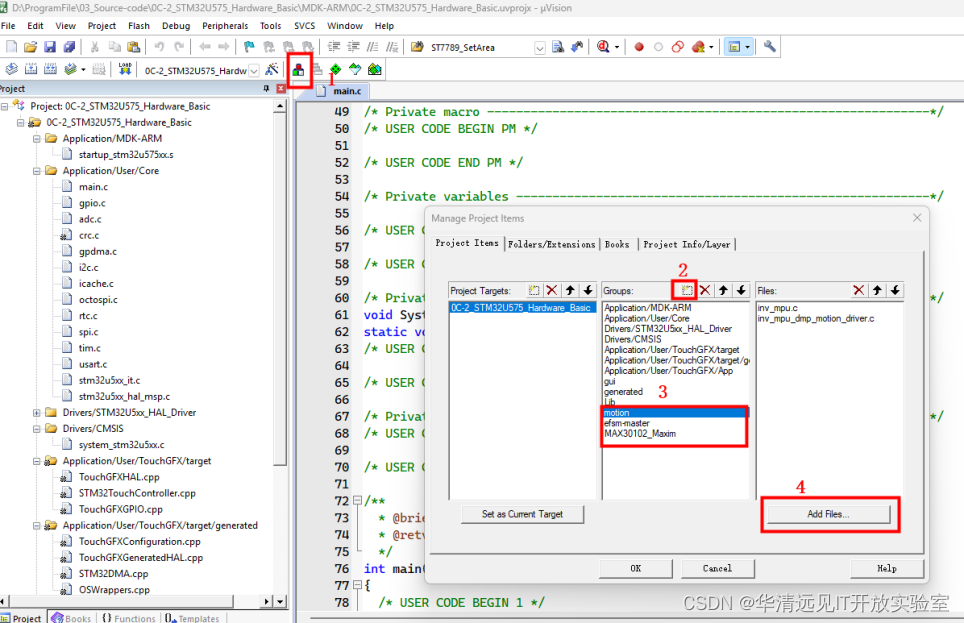
打开…\0C-2_STM32U575_Hardware_Basic\MDK-ARM下的0C-2_STM32U575_Hardware_Basic.uvprojx,点击菜单栏的工程管理快捷图标,在Groups中增加motion、efsm-master、MAX30102_Maxim组,并在Files族中添加相应的.c文件。
在Application/User/Core中增加bsp_ap3216c.c、bsp_esp8266.c、bsp_ft6336.c、bsp_ili9341_4line.c、bsp_ospi_w25q128.c、bsp_sht20.c、user_app.c文件。

点击菜单栏的魔术棒图标,在C/C++(AC6),增加motion、efsm-master、MAX30102_Maxim的头文件路径。

打开main.c文件,在Private includes的BEGIN与END之间增加以下代码,如出现乱码,调整编码格式为UTF-8。
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "user_app.h" //用户应用程序/* USER CODE END Includes */在Private define的BEGIN与END之间增加以下代码,用于ADC的多通达数据采集。
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define ADC_CONVERTED_DATA_BUFFER_SIZE 6
/* USER CODE END PD */在Private variables的BEGIN与END之间增加以下代码,用于 任务标志组与ADC多通道采集。
/* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
uint8_t gChatCount = 10; //全局按键按压计数
extern gTask_MarkEN gTaskEnMark; //系统任务使能标识
static uint8_t gTaskIndex = 0x00; //系统任务索引变量
extern volatile uint8_t TcpClosedFlag;
ADC_ValTypeDef gStruADC={0,0,0,0,0,0}; //A/D通道实时采集的数据
/* USER CODE END PV */
在Private function的BEGIN与END之间增加以下代码,用于touchgfx接口声明与wifi模组数据接收。
/* USER CODE BEGIN PFP */
extern void touchgfx_signalVSynTimer(void);
extern gTask_BitDef gTaskStateBit; //任务执行过程中使用到的标志位
volatile uint8_t gRX3_BufF[1]; //串口3-wifi模组接收到的数据
/* USER CODE END PFP */在Private user code的BEGIN与END之间增加半主机模式的设置与外部存储器测试。
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**************************关闭标准库下的半主机模式****************************/
__ASM (".global __use_no_semihosting"); //AC6编译器
//标准库需要的支持函数
struct FILE
{int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{ x = x;
}
void _ttywrch(int ch)
{ch = ch;
}
//printf实现重定向
int fputc(int ch, FILE *f)
{uint8_t temp[1] = {ch};HAL_UART_Transmit(&huart1, temp, 1, 2);return ch;
}
/******************************************************************************//*******************************************************************************
* 函 数 名: OSPI_W25Qxx_mmap
* 入口参数: 无
* 返 回 值: 无
* 函数功能: 设置为内存映射模式
* 说 明: 无
*******************************************************************************/
void OSPI_W25Qxx_mmap(void) //Flash读写测试
{int32_t OSPI_Status ; //检测标志位//OSPI_Status = OSPI_W25Qxx_MemoryMappedMode(); //配置OSPI为内存映射模式if( OSPI_Status == OSPI_W25Qxx_OK ){printf ("\r\n内存映射模式设置成功>>>>\r\n"); }else{printf ("\r\n内存映射模式设置失败>>>>\r\n");Error_Handler();}
}
/* USER CODE END 0 */
在main函数中增加相关外设的初始化配置。/* USER CODE BEGIN 2 */
//ESP8266初始化,HAL库使用USART3
ESP8266_Init(&huart5,(uint8_t *)gRX3_BufF,115200);
ap3216c_init(); //环境光传感器初始化ILI9341_Init(); //显示屏初始化FT6336_init(); //触摸屏初始化
mpu_init_dmp(); //mpu6050 dmp初始化
System_Time_init(); //NOR Flash初始化OSPI_W25Qxx_Init(); //初始化W25Q128
OSPI_W25Qxx_mmap(); //设置为内存映射模式
HAL_PWREx_EnableVddA();
HAL_PWREx_EnableVddIO2();//清空任务列表
for(gTaskIndex = 0;gTaskIndex < OS_TASKLISTCNT;gTaskIndex++) g_OSTsakList[gTaskIndex]=NULL;//读取ADC值
if (HAL_ADC_Start_DMA(&hadc1,(uint32_t *)&gStruADC,ADC_CONVERTED_DATA_BUFFER_SIZE) != HAL_OK) {Error_Handler();}/* USER CODE END 2 */ 在while (1)函数前增加任务调度的定时器使能。
/* Infinite loop *//* USER CODE BEGIN WHILE */HAL_TIM_Base_Start_IT(&htim16);//开启定时器16开启,系统任务调度开始HAL_TIM_Base_Start_IT(&htim17);//开启定时器17开启,设备控制任务开始 在while (1)函数中增加任务调度管理代码。
while (1){/* USER CODE END WHILE */MX_TouchGFX_Process();/* USER CODE BEGIN 3 *///执行任务列表中的的任务for(gTaskIndex = 0;gTaskIndex < OS_TASKLISTCNT;gTaskIndex++){if((*g_OSTsakList[gTaskIndex]) != NULL){g_OSTsakList[gTaskIndex]();g_OSTsakList[gTaskIndex] = NULL; }}}/* USER CODE END 3 */在USER CODE BEGIN 4位置增加中断回调函数,用于任务的调度、串口数据的接收处理。
/* USER CODE BEGIN 4 */
//定时器16/17的任务分配
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{static uint8_t p_Time16Cnt = 0,p_Time17Cnt = 0;/***************************************************************************************///定时器16进行5ms任务中断if (htim->Instance == htim16.Instance) {p_Time16Cnt++;//if(!(p_Time16Cnt % 4)) //20ms(50Hz)进行触发刷新{touchgfx_signalVSynTimer(); //touchgfx用户接口}//五项按键读取if(!(p_Time16Cnt % 20)) //100ms进行一次窗口更新{if(gTaskStateBit.TouchPress == 0) {g_OSTsakList[eUPDATE_FIVEKEY] = Update_FiveKey_Value; //更新五向键数据 }}//1000ms运行一次,系统运行指示灯if(!(p_Time16Cnt % 200)) {p_Time16Cnt = 0; HAL_GPIO_TogglePin(BLUE_LED_GPIO_Port,BLUE_LED_Pin);}}/***************************************************************************************///定时器17进行100ms任务中断if (htim->Instance == htim17.Instance) {
p_Time17Cnt++;//周期为200ms任务if(!(p_Time17Cnt % 2)) //200ms进行一次下列代码{if((gTaskEnMark.UPDATE_DIAL_EN || gTaskEnMark.UPDATE_SIX_AXIS_EN) && (gTaskStateBit.TouchPress == 0)) {g_OSTsakList[eUPDATE_SIX_AXIS] = Update_EulerAngle; //欧拉角更新}}//周期为300ms任务if(!(p_Time17Cnt % 3)) //300ms进行一次下列代码{if(gTaskEnMark.UPDATE_WIFI_RSSI_EN) g_OSTsakList[eUPDATE_WIFI_RSSI] = ESP8266_RSSI_Task; //获取wifi连接的RSSI值 } //周期为500ms任务if(!(p_Time17Cnt % 5)) //500ms进行一次下列代码{if(gTaskEnMark.UPDATE_CHIPPAGE) g_OSTsakList[eUPDATE_CHIPINFO] = Update_ChipInfo; //系统信息更新}//周期为1000ms任务if(!(p_Time17Cnt % 10)) //1s进行一次下列代码{if(gTaskEnMark.UPDATE_DIAL_EN && (gTaskStateBit.TouchPress == 0)){g_OSTsakList[eUPDATE_TIME] = Update_System_Time; //系统时间更新} }//周期为2000ms任务 if(!(p_Time17Cnt % 20)) //2s进行一次下列代码{if((gTaskEnMark.UPDATE_DIAL_EN || gTaskEnMark.UPDATE_INFOPAGE) && (gTaskStateBit.TouchPress == 0)){g_OSTsakList[eUPDATE_DIAL_INFO] = Update_DialInfo; //更新电压、电流、温湿度、光照度} } //周期为3000ms任务if(!(p_Time17Cnt % 30)) //3s进行一次下列代码{//心率任务会阻塞主程序if(gTaskEnMark.UPDATE_HEALTHPAGE) {g_OSTsakList[eUPDATE_HEART_RATE] = Update_HeartRateInfo; //获取健康信息} }//周期为10000ms任务if(!(p_Time17Cnt % 100)) //10s进行一次下列代码{p_Time17Cnt = 0; }}/***************************************************************************************//* Prevent unused argument(s) compilation warning */UNUSED(htim);
}
/*** @brief EXTI line rising detection callback.* @param GPIO_Pin: Specifies the port pin connected to corresponding EXTI line.* @retval None*/
void HAL_GPIO_EXTI_Falling_Callback(uint16_t GPIO_Pin)
{/* Prevent unused argument(s) compilation warning */UNUSED(GPIO_Pin);//触摸按下事件if((!HAL_GPIO_ReadPin(TP_INT_GPIO_Port,TP_INT_Pin)) && (GPIO_Pin == TP_INT_Pin)){gTaskStateBit.TouchPress = 1;}if(!HAL_GPIO_ReadPin(USER_KEY_GPIO_Port,USER_KEY_Pin)){gChatCount = gChatCount + 10;if(gChatCount>=100) gChatCount=10;}
}
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{/* Prevent unused argument(s) compilation warning */UNUSED(GPIO_Pin);//触摸释放事件if(HAL_GPIO_ReadPin(TP_INT_GPIO_Port,TP_INT_Pin) && gTaskStateBit.TouchPress){FT6336_irq_fuc(); //触摸中断产生gTaskStateBit.TouchPress = 0; //清除触摸标志
}//五向按键按下if(HAL_GPIO_ReadPin(EXT_FIVEKEY_GPIO_Port,EXT_FIVEKEY_Pin) && (GPIO_Pin == EXT_FIVEKEY_Pin) && (gTaskStateBit.TouchPress == 0)){gTaskStateBit.FiveKeyPress = 1; }
}
/*** @brief Conversion complete callback in non blocking mode * @param hadc: ADC handle* @note This example shows a simple way to report end of conversion* and get conversion result. You can add your own implementation.* @retval None*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{//更新DMA传输状态标志gTaskStateBit.ADCC = 1;
}
/*** @brief Rx Transfer completed callback.* @param huart UART handle.* @retval None*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{//USART3接收数据if (huart->Instance == UART5) {if(ESP8266_Fram_Record_Struct .InfBit .FramLength < ( RX_BUF_MAX_LEN - 1 ) ) //接收到的数据存储至buffer{//留最后一位做结束位ESP8266_Fram_Record_Struct .Data_RX_BUF[ ESP8266_Fram_Record_Struct .InfBit .FramLength ++ ] = gRX3_BufF[0]; //UART3开启下一次接收HAL_UART_Receive_IT(&huart5,(uint8_t *)&gRX3_BufF, 1);//接收一个字节} }}
/*** @brief UART Abort Receive Complete callback.* @param huart UART handle.* @retval None*/
void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart)
{//USART3帧传输完成,产生空闲if (huart->Instance == UART5){ESP8266_Fram_Record_Struct .InfBit .FramFinishFlag = 1; //帧传输完成标志TcpClosedFlag = strstr ( ESP8266_Fram_Record_Struct .Data_RX_BUF, "CLOSED\r\n" ) ? 1 : 0; //判断连接//UART3开启下一次接收HAL_UART_Receive_IT(&huart5,(uint8_t *)&gRX3_BufF, 1);//接收一个字节}
}
/* USER CODE END 4 */
在stm32u5xx_it.c文件中,UART5_IRQHandler中断函数中增加空闲中断判断。
void UART5_IRQHandler(void)
{/* USER CODE BEGIN UART5_IRQn 0 *//* USER CODE END UART5_IRQn 0 */HAL_UART_IRQHandler(&huart5);/* USER CODE BEGIN UART5_IRQn 1 */if (__HAL_UART_GET_FLAG(&huart5, UART_FLAG_IDLE) != RESET) { __HAL_UART_CLEAR_IDLEFLAG(&huart5); HAL_UART_AbortReceive_IT(&huart5); }/* USER CODE END UART5_IRQn 1 */
}
在TouchGFXHAL.cpp文件中增加头文件包含。
/* USER CODE BEGIN TouchGFXHAL.cpp */
#include <touchgfx/hal/OSWrappers.hpp>
//用户外设驱动头文件
#include "spi.h"
#include "stm32u5xx_hal.h"
//
extern "C" void ILI9341_SetArea(uint16_t x0, uint16_t y0, uint16_t x1, uint16_t y1); //设置显示区域
extern "C" void ILI9341_WriteRAM_Prepare(void);
//
extern SPI_HandleTypeDef hspi1;
extern DMA_HandleTypeDef handle_GPDMA1_Channel0;
//增加屏幕的DMA刷新函数
/**
* Sets the frame buffer address used by the TFT controller.** @param [in] address New frame buffer address.*/
void TouchGFXHAL::setTFTFrameBuffer(uint16_t* address)
{// Calling parent implementation of setTFTFrameBuffer(uint16_t* address).//// To overwrite the generated implementation, omit call to parent function// and implemented needed functionality here.TouchGFXGeneratedHAL::setTFTFrameBuffer(address);
}
static void USER_SPI_Transmit_DMA(const uint16_t *pData, uint16_t pSize)
{//Set the transaction informationhspi1.State = HAL_SPI_STATE_READY;hspi1.ErrorCode = HAL_SPI_ERROR_NONE;//Init field not used in handle to zerohspi1.RxISR = NULL;hspi1.TxISR = NULL;//Configure communication direction : 1LineSPI_2LINES_TX(&hspi1);// Packing mode management is enabled by the DMA settingsIS_SPI_FULL_INSTANCE(hspi1.Instance);//Clear TXDMAEN bitCLEAR_BIT(hspi1.Instance->CFG1, SPI_CFG1_TXDMAEN);//Update the DMA channel statehandle_GPDMA1_Channel0.State = HAL_DMA_STATE_BUSY;//Update the DMA channel error codehandle_GPDMA1_Channel0.ErrorCode = HAL_DMA_ERROR_NONE;//Configure the source address, destination address, the data size and clear flagsMODIFY_REG(handle_GPDMA1_Channel0.Instance->CBR1, DMA_CBR1_BNDT, ((pSize) & DMA_CBR1_BNDT));//Clear all interrupt flags__HAL_DMA_CLEAR_FLAG(&handle_GPDMA1_Channel0, DMA_FLAG_TC | DMA_FLAG_HT | DMA_FLAG_DTE | DMA_FLAG_ULE | DMA_FLAG_USE | DMA_FLAG_SUSP |DMA_FLAG_TO);//Configure DMA channel source addresshandle_GPDMA1_Channel0.Instance->CSAR = (uint32_t)pData;//Configure DMA channel destination addresshandle_GPDMA1_Channel0.Instance->CDAR = (uint32_t)&hspi1.Instance->TXDR;//Enable common interrupts: Transfer Complete and Transfer Errors ITs__HAL_DMA_ENABLE_IT(&handle_GPDMA1_Channel0, (DMA_IT_TC | DMA_IT_DTE | DMA_IT_ULE | DMA_IT_USE | DMA_IT_TO));//If Half Transfer complete callback is set, enable the corresponding IT__HAL_DMA_ENABLE_IT(&handle_GPDMA1_Channel0, DMA_IT_HT);//Enable DMA channel__HAL_DMA_ENABLE(&handle_GPDMA1_Channel0);//Set the number of data at current transferMODIFY_REG(hspi1.Instance->CR2, SPI_CR2_TSIZE, (pSize));//Enable Tx DMA RequestSET_BIT(hspi1.Instance->CFG1, SPI_CFG1_TXDMAEN);//Enable the SPI Error Interrupt Bit__HAL_SPI_ENABLE_IT(&hspi1, (SPI_IT_UDR | SPI_IT_FRE | SPI_IT_MODF));//Enable SPI peripheral__HAL_SPI_ENABLE(&hspi1);//if (((hspi1.Instance->AUTOCR & SPI_AUTOCR_TRIGEN) == 0U) && (hspi1.Init.Mode == SPI_MODE_MASTER)){/* Master transfer start */SET_BIT(hspi1.Instance->CR1, SPI_CR1_CSTART);}
}在flushFrameBuffer函数中增加屏幕刷新功能。
/*** This function is called whenever the framework has performed a partial draw.** @param rect The area of the screen that has been drawn, expressed in absolute coordinates.** @see flushFrameBuffer().*/
static uint16_t flushAreaBuf[31745]; //62KB区域性刷新缓冲区
void TouchGFXHAL::flushFrameBuffer(const touchgfx::Rect& rect)
{// Calling parent implementation of flushFrameBuffer(const touchgfx::Rect& rect).//// To overwrite the generated implementation, omit call to parent function// and implemented needed functionality here.// Please note, HAL::flushFrameBuffer(const touchgfx::Rect& rect) must// be called to notify the touchgfx framework that flush has been performed.// To calculate he start adress of rect,// use advanceFrameBufferToRect(uint8_t* fbPtr, const touchgfx::Rect& rect)// defined in TouchGFXGeneratedHAL.cpp/*************************************屏幕刷新开始*************************************/__IO uint16_t *pixels; //帧缓冲地址__IO uint16_t pheight = 0,pWidth = 0,pBuffCnt = 0;//保存长度__IO uint32_t pTotalPixel = rect.width * rect.height * 2;__IO uint32_t pFull = pTotalPixel / 63488; //62KB取整__IO uint32_t pRemain = pTotalPixel % 63488; //62KB取余//设置显示区域ILI9341_SetArea(rect.x, rect.y,rect.x+rect.width-1, rect.y+rect.height-1);ILI9341_WriteRAM_Prepare(); //开始写入GRAM //设置SPI数据格式为16位,缓冲区数据采用小端模式,ILI9341数据传输高字节在前hspi1.Instance->CFG1 &= (~0x1F);hspi1.Instance->CFG1 |= SPI_DATASIZE_16BIT; //if((rect.width == 320) && (rect.height ==240)) //采用横屏,整个屏幕刷新{//获取像素点地址pixels = getClientFrameBuffer() + rect.x + (rect.y) * HAL::DISPLAY_WIDTH; //传输长度为62KB的像素点for (pBuffCnt = 0; pBuffCnt < pFull; pBuffCnt++){//启动DMA传输USER_SPI_Transmit_DMA((uint16_t *)pixels,63488); //DMA单次传输最长0xFFFF//pixels = pixels + 31744; //地址偏移//等待DMA传输完成while(HAL_DMA_GetState(&handle_GPDMA1_Channel0) != HAL_DMA_STATE_READY); //适当延时HAL_Delay(0);
//阻塞模式下,终止正在的传输HAL_SPI_Abort(&hspi1);}//启动DMA传输USER_SPI_Transmit_DMA((uint16_t *)pixels,pRemain); //剩余数据传输//等待DMA传输完成while(HAL_DMA_GetState(&handle_GPDMA1_Channel0) != HAL_DMA_STATE_READY); //适当延时HAL_Delay(0);//阻塞模式下,终止正在的传输HAL_SPI_Abort(&hspi1);}else //屏幕区域刷新{for (pheight = 0; pheight < rect.height; pheight++){//缓冲区数据采用小端模式,ILI9341数据传输高字节在前pixels = getClientFrameBuffer() + rect.x + (pheight + rect.y) * HAL::DISPLAY_WIDTH;//读取限度点至缓冲区for (pWidth = 0; pWidth < rect.width; pWidth++){flushAreaBuf[pBuffCnt++] = *pixels; //读取像素点pixels++; //调整偏移地址if(pBuffCnt >= 31744) //缓冲区数据满,传输数据至屏幕{//启动DMA传输USER_SPI_Transmit_DMA((uint16_t *)flushAreaBuf,63488);//等待DMA传输完成while(HAL_DMA_GetState(&handle_GPDMA1_Channel0) != HAL_DMA_STATE_READY); //适当延时HAL_Delay(0);//阻塞模式下,终止正在的传输HAL_SPI_Abort(&hspi1);//复位计数值pBuffCnt =0;}}}//启动DMA传输USER_SPI_Transmit_DMA((uint16_t *)flushAreaBuf,pBuffCnt * 2);//等待DMA传输完成while(HAL_DMA_GetState(&handle_GPDMA1_Channel0) != HAL_DMA_STATE_READY);
//适当延时HAL_Delay(0);//阻塞模式下,终止正在的传输HAL_SPI_Abort(&hspi1);}//设置SPI数据格式为8位hspi1.Instance->CFG1 &= (~0x1F);hspi1.Instance->CFG1 |= SPI_DATASIZE_8BIT; /*************************************屏幕刷新完成*************************************///TouchGFXGeneratedHAL::flushFrameBuffer(rect);
}增加touchGFX的同步刷新函数。
bool TouchGFXHAL::beginFrame()
{return TouchGFXGeneratedHAL::beginFrame();
}void TouchGFXHAL::endFrame()
{TouchGFXGeneratedHAL::endFrame();
}extern "C"
void touchgfx_signalVSynTimer(void)
{/* VSync has occurred, increment TouchGFX engine vsync counter */HAL::getInstance()->vSync();/* VSync has occurred, signal TouchGFX engine */OSWrappers::signalVSync();
}
/* USER CODE END TouchGFXHAL.cpp */在STM32TouchController.cpp函数中增加触摸屏驱动接口。
void STM32TouchController::init()
{/*** Initialize touch controller and driver**/
}extern "C"
{#include "bsp_ft6336.h"
}
//
extern "C" FT6336_TouchPointType tp;
extern volatile uint32_t ft6336_on_touch_count;
//
bool STM32TouchController::sampleTouch(int32_t& x, int32_t& y)
{/*** By default sampleTouch returns false,* return true if a touch has been detected, otherwise false.** Coordinates are passed to the caller by reference by x and y.** This function is called by the TouchGFX framework.* By default sampleTouch is called every tick, this can be adjusted by HAL::setTouchSampleRate(int8_t);**/uint16_t xDiff = 0,yDiff = 0; static uint16_t pI_Touch_X = 0, pI_Touch_Y = 0;//触摸中断产生if (ft6336_on_touch_count) // irq done{uint8_t id1 = FT6336_read_touch1_id(); // id1 = 0 or 1tp.tp[id1].status = (tp.tp[id1].status == release) ? touch : stream;tp.tp[id1].x = FT6336_read_touch1_x();tp.tp[id1].y = FT6336_read_touch1_y();tp.tp[~id1 & 0x01].status = release;//更新数据至TouchGFXif (tp.tp[0].status == 1) //最多支持两个触点{ xDiff = tp.tp[0].x > pI_Touch_X ? (tp.tp[0].x - pI_Touch_X): (pI_Touch_X - tp.tp[0].x);yDiff = tp.tp[0].y > pI_Touch_Y ? (tp.tp[0].y - pI_Touch_Y): (pI_Touch_Y - tp.tp[0].y);//判断阈值if ((xDiff + yDiff) > 5){pI_Touch_X = tp.tp[0].x;pI_Touch_Y = tp.tp[0].y;}//更新触摸,横屏触摸坐标变换x = pI_Touch_Y;y = 240 - pI_Touch_X;}ft6336_on_touch_count = 0;//return true;}//return false;
}点击菜单栏的魔术棒,在Linker栏中设置分散加载文件。

在.sct文件中增加外部存储器的加载描述。
; *************************************************************
; *** Scatter-Loading Description File generated by uVision ***
; *************************************************************LR_IROM1 0x08000000 0x00200000 { ; load region size_regionER_IROM1 0x08000000 0x00200000 { ; load address = execution address*.o (RESET, +First)*(InRoot$$Sections).ANY (+RO).ANY (+XO)}RW_IRAM1 0x20000000 0x000C0000 { ; RW data.ANY (+RW +ZI)}
}LR_EROM1 0x90000000 0x1000000 { ; load region size_regionER_EROM1 0x90000000 0x1000000 { ; load address = execution address*.o (ExtFlashSection)}
}修改完成后,保存文件。重新打开设置栏,查看注意是否去掉3中的勾选。。。。
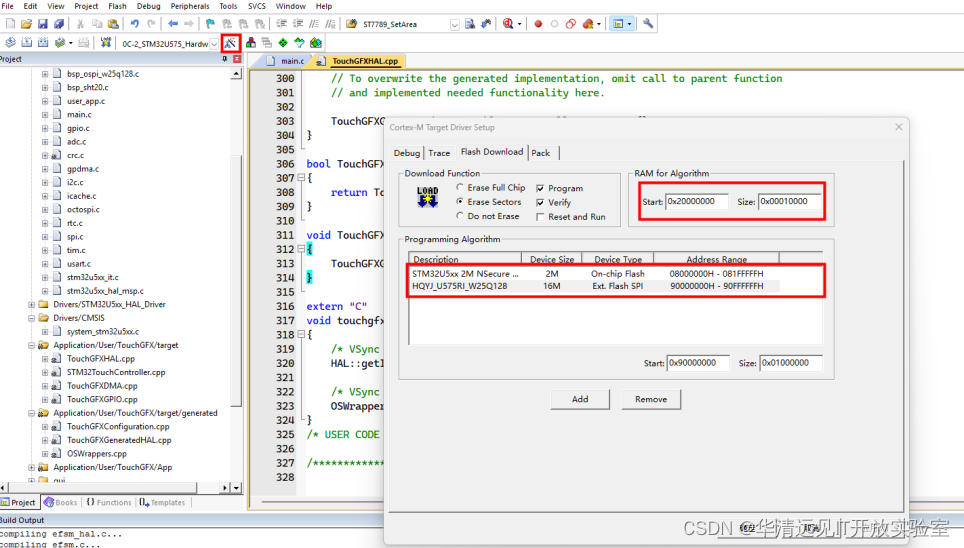
点击菜单栏的魔术棒,在Debug栏中设置加载算法文件,算法加载文件的方法可以查看《STM32U5核心板NOR-Flash烧写算法的使用v1.0》。
点击全编译工程,至此底层驱动文件的添加完成。