🐱作者:一只大喵咪1201
🐱专栏:《RTOS学习》
🔥格言:你只管努力,剩下的交给时间!

目录
- 🏀Hello驱动程序
- ⚽驱动程序框架
- ⚽编程
- 🏀LED驱动
- ⚽配置GPIO
- ⚽编程
- 驱动程序
- 映射虚拟地址
- 应用层
- 🏀总结
🏀Hello驱动程序
Linux下一切皆文件,使用open系统调用打开文件时会得到一个文件描述符,也被叫做文件句柄。
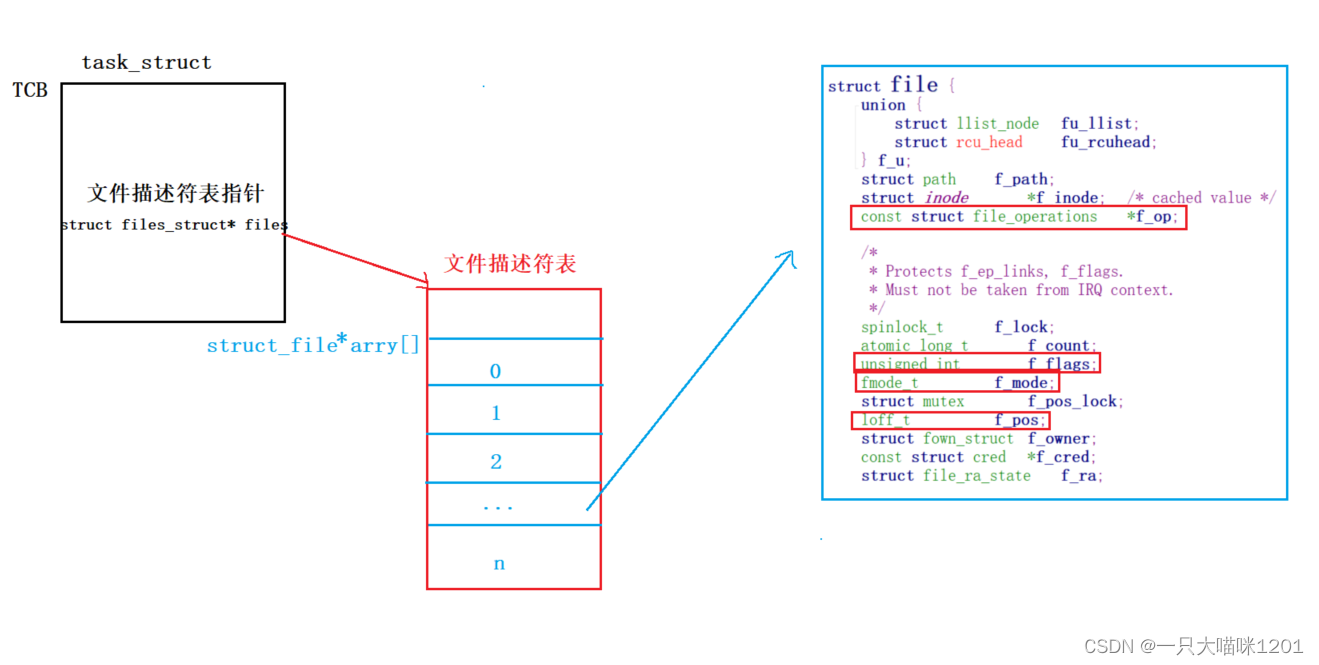
如上图所示,在打开该文件进程的PCB中有一个文件描述符表的指针struct file_struct* files,该指针指向属于该进程的文件描述符表,本质上就是一个数组,所谓文件句柄就是该数组的下标,每打开一个文件,就在该数组中放入这个文件的struct file*指针,并且返回数组的下标。
看struct file结构体的定义,在使用open时传入的flags、mode等参数都会被记录在这个结构体中,在读写文件时,文件的当前偏移地址也会保存在f_pos成员里。
- 打开字符设备节点时,内核中也会打开一个对应的
struct file结构体。
字符设备节点是一种特殊类型的文件,用于表示字符设备。这些设备通常以字符为单位进行数据的输入和输出,例如键盘或者串口。
- 字符设备节点文件通常位于 /dev目录下。

如上图所示,当应用层使用open打开字符设备节点时,在内核中会创建一个struct file结构体,并且将传入的参数记录到该结构体中,而且会使用file_operations* f_op结构体成员中的open函数指针来打开设备节点。
当应用层使用read/write函数进行读写时,也会使用file_operations* f_op结构体成员中的read/write函数指针来实现读写目的,这个结构体是由字符设备驱动程序提供的。

如上如所示file_operations结构体的部分定义,其中有read和write以及open等函数指针,当应用层使用相应的open/write/read系统调用接口时,最终会调用内核层中该结构体里对应的函数指针来实现目的。
⚽驱动程序框架
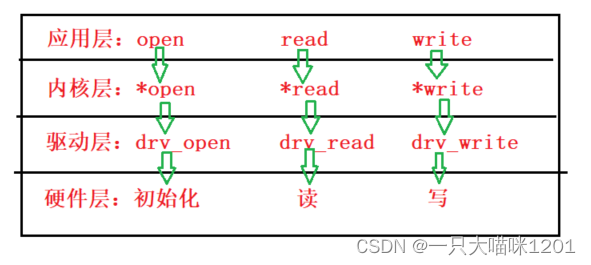
如上图所示,驱动程序的目的就是要在应用层调用open/write/read等系统调用接口时,在内核层中调用file_operations里的open/write/read函数指针,而函数指针指向的drv_open/drv_read/drv_write等驱动层函数是由我们自己定义的。在驱动程序中,实现硬件的初始化,以及数据读写。
- 定义自己的
file_operations结构体。
前面本喵说过,file_operations结构体是由驱动程序提供的,而驱动程序又是我们写的,所以我们首先要做的就是定义自己的file_operations 结构体。
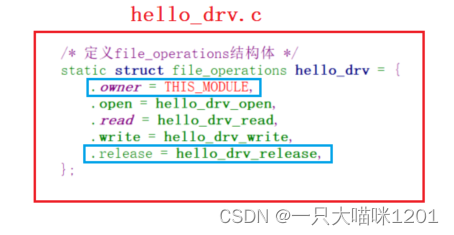
如上图所示,在hello_drv.c源文件中定义file_operations结构体变量,并且进行初始化,给函数指针赋值相应的函数。
owner:是一个指向模块所有者的指针,是必须设置的。
- gcc编译器中增加了使用
.结构体成员 = xxx来给成员变量赋值的语法。
- 实现对应的
drv_open/drv_read/drv_write等函数。

如上图所示驱动函数的定义,由于现在讲解的是框架,所以本喵在函数里没有写任何操作,只是使用printk打印一些调试信息。
- 内核中打印调试信息只能使用
printk,不能使用printf。- 使用命令行指令
dmesg就能看到日志中的调试信息。
- 确定主设备号,也可以让内核自己分配。
每一个字符设备都有一个主设备号,用于标识设备的类型或者设备驱动程序。不同类型的设备或不同的驱动程序会有不同的主设备号。例如,所有的串口设备可能共享一个主设备号,而所有的打印机设备可能又共享另一个不同的主设备号。
- 主设备号就像是一个类,可以用这个类定义出多个实例。
- 主设备号可以由我们自己决定,也可以将其设置为0,让内核自己分配。
建议让内核去分配主设备号,因为我们并不是很清楚有哪些主设备号,自己决定的是否已经被使用。
/* 确定主设备号 */
static int major = 0
定义一个全局变量major来表示主设备号,暂时先给它赋值为0。
- 把
file_operations结构体注册到内核。
暂时可以认为在内核中有一个chardevs[]数组,该数组中存放的是字符设备节点的主设备号,当使用某一类字符设备时,会从该数组中寻找对应设备的file_operations结构体对象。
所谓注册就是将我们自己的字符设备主设备号注册到这个数组中,使用register_chrdev函数来实现:
major = register_chrdev(0, "hello", &hello_drv);
- 第一个参数是主设备号,如果传入的是0,则返回内核自动分配的主设备号。
- 第二个参数是字符设备的名称,是一个字符串。
- 第三个参数是我们提供的
file_operations结构体指针。
调用该函数后,主设备号和file_operations以及设备名称就绑定在了一起,而且主设备号放入到了chardevs[]数组中。
- 定义入口函数,安装驱动程序时,就会去调用这个入口函数 。
将file_operations注册到内核中是由入口函数完成的,入口函数使用宏__init修饰:

如上图所示,在安装驱动程序的时候,内核会自动去调用这个hello_init函数,在该函数中完成:
-
注册
file_operations结构体到内核中,并得到主设备号。 -
创建设备信息类,使用
class_create实现,该类中包含内核需要的设备节点信息,更方便内核去创建节点。 -
创建设备节点,使用
device_create实现,此时在内核中会生成一个/dev/hello路径用来表示节点设备。
- 出口函数,卸载驱动程序时,就会去调用这个出口函数。
有入口函数就有出口函数,出口函数使用宏__exit来修饰:
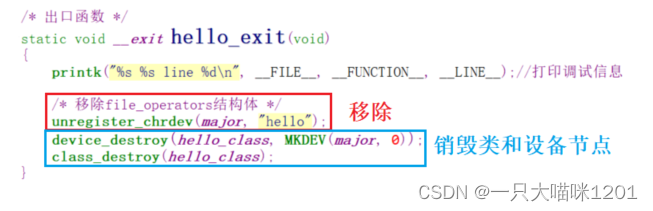
如上图所示函数,在卸载时会由内核自动调用,都要卸载了,就要将前面注册到内核中的字符设备移除,使用unregister_chrdev实现,并且将前面创建的字符设备类和设备节点都销毁,使用class_destroy和device_destroy实现。
- 完善设备信息
module_init(hello_init);
module_exit(hello_exit);MODULE_LICENSE("GPL");
使用module_init告诉内核hello_init函数是入口函数,使用module_exit告诉内核hello_exit是出口函数。
使用MODULE_LICENSE表明遵循GPL协议,否则是无法使用我们的驱动程序的。
至此已经实现了一个驱动程序框架,在命名上以hello为例,这个可以作为一个模板,在使用的时候只需要将hello改为相应的设备名字即可,然后再在我们自己实现的驱动函数中增加一些具体的代码。
⚽编程
下面用上面的框架来实现一个不涉及硬件操作的hello驱动程序:
- 命令行输入
./hello_drv_test -w abc,将abc字符串写入内核缓冲区中。 - 命令行输入
./hello_drv_test -r,从内核缓冲区中读出刚刚输入的字符串。
驱动层代码:
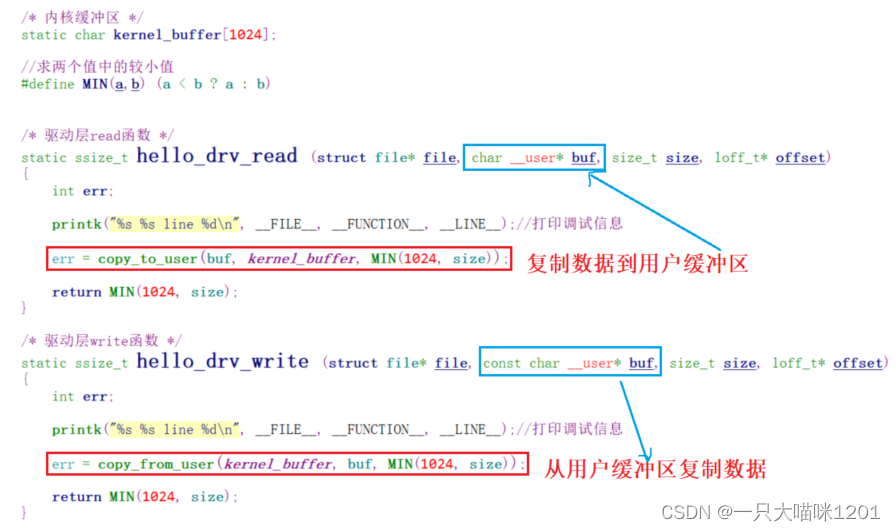
如上图所示代码,只需要实现file_operations结构体中的read和write方法,也就是对应的hello_drv_read和hello_drv_wite函数,其他的没有用到。
- 使用
__user修饰的buf,表示这是来自用户层的缓冲区。
用户层的缓冲区不能使用strcpy等应用层函数直接操作,而是必须要使用内核提供的复制函数:
copy_to_user:从内核缓冲区复制数据到用户缓冲区,第一个参数是目的buf,第二个参数是源kernel_buffer,第三个参数是要复制的字节数。copy_from_user:从用户缓冲区复制数据到内核缓冲区,参数参考上面。
由于定义的缓冲区大小是1024,防止越界,使用宏MIN将1024和用户层指定的数据大小size作比较,取较小值作为复制数据的大小。
应用层代码:
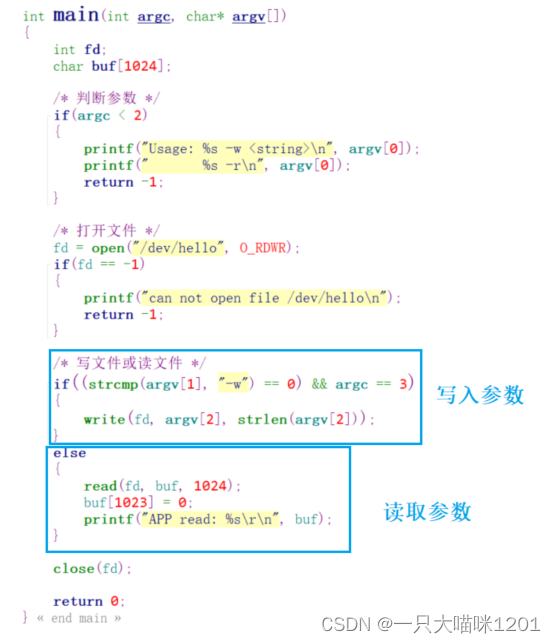
如上图所示,使用命令行参数传入-w,-r,以及要写入的字符串,在main函数中:
- 先打开
/dev/hello目录下的字符设备节点,在应用层看来,这就是一个普通文件。 - 根据命令行中的第二个参数判断:
-w:使用write将第三个参数的字符串写入到内核缓冲区中。-r:使用read将内核缓冲区的数据读出来。
这里应用层的wite最终会调用驱动层中的hello_drv_write,应用层的read最终会调用驱动层中的hello_drv_read。
交叉编译:
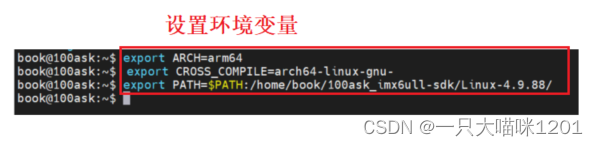
如上图所示,在命令行中输入上面的三条指令,设置环境变量,从而实现交叉编译环境的配置。
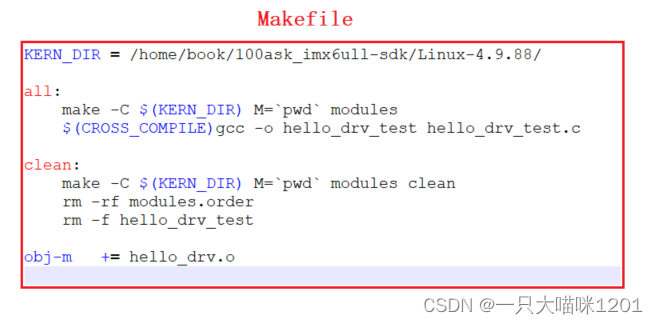
如上图所示,使用该Makefile文件来编译驱动文件hello_drv.c和应用层测试文件hello_drv_test.c,暂时不用这些指令是什么意思,直接用就星。
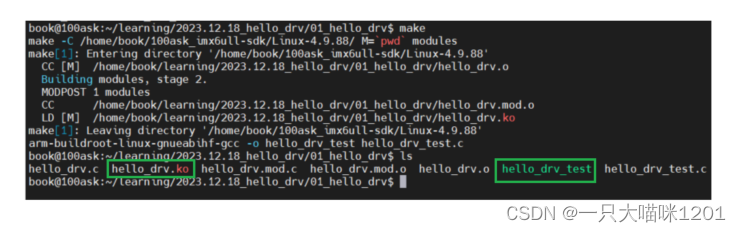
如上图所示,生成hello_drv.ko和hello_drv_test两个文件:
.ko后缀:表示这是一个内核模块,用于在运行时向内核动态添加功能,而不需要重新编译整个内核。
挂载根文件系统:

如上图,将生成的hello_drv.ko驱动模块文件和hello_drv_test测试可执行程序复制到nfs_rootfs文件下。

如上图所示,在IMX6ULL开发板上,通过串口工具执行mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt指令,将刚刚进行编译等操作的Linux服务器里的根文件系统挂载到开发版上。
nfs_rootfs是一个通过网络文件系统(NFS)挂载的根文件系统。- 网络文件系统(NFS):NFS 是一个分布式文件系统协议,它允许用户在网络上访问存储在远程计算机上的文件,就像访问本地存储的文件一样。
- 根文件系统(rootfs):根文件系统包含操作系统的核心组件,如可执行文件、库文件、配置文件等。
此时在开发板上就相当于有了一个Linux操作系统,实际上用的是服务器的系统,可以看到,服务器的根文件系统中有什么,挂载之后的/mnt里就有什么。
安装驱动程序:
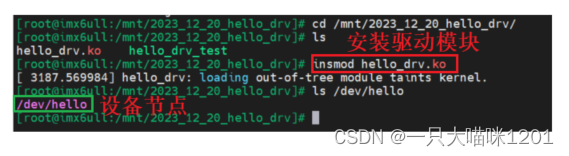
如上图所示,进入开发板挂载的根文件/mnt中,找到我们的hello_drv.ko所在位置,然后执行insmod hello_drv.ko指令安装设备节点的驱动程序,安装完毕后,在/dev设备节点中可以看到hello设备节点。
测试:

如上图所示,执行应用层测试程序hello_drv_test:
- 在执行可执行程序的命令行参数中使用
-w选项,写入A-Big-MiaoMi字符串到内核缓冲区中。 - 再使用
-r选项,从内核缓冲区中读取刚刚写入数据,结果是APP read: A-Big-MiaoMi。
根据上面测试结果,说明我们的第一个驱动程序就写成功了。
🏀LED驱动
⚽配置GPIO
配置GPIO通用步骤:
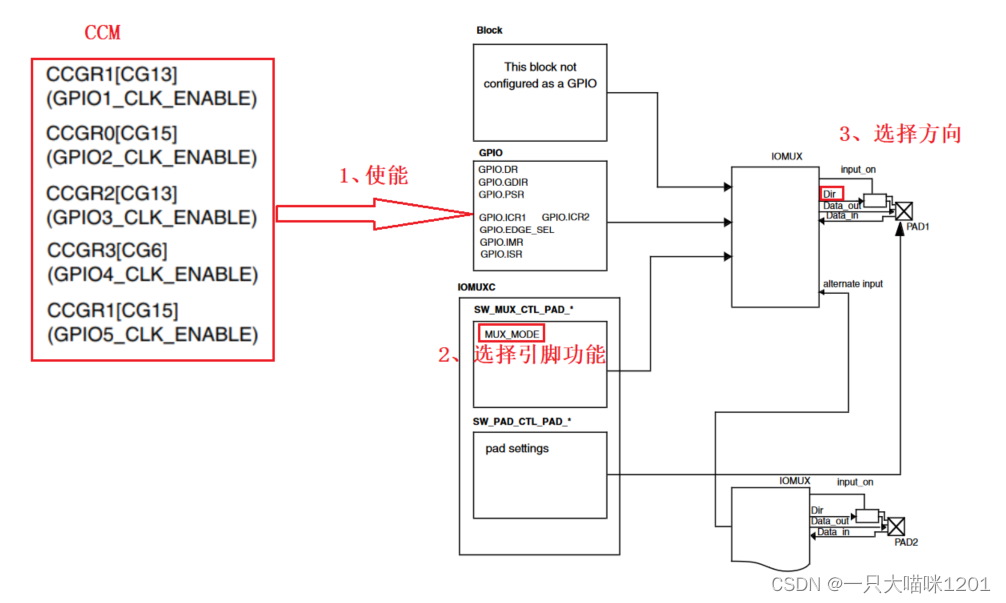
如上图所示IMX6ULLGPIO框图,输出功能的配置和其他芯片一样分为四步:
- 使能GPIO组:设置
CCM寄存器组中的CCGRx寄存器中的相应位CGx来使能对应的GPIO组。 - 选择GOIO为通用输入输出功能:设置
IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPERx寄存器中的MUX_MODE位将IO口设为通用输入输出功能。 - 选择方向:设置
GPIOx_GDIR中的相应位,0表示输入,1表示输出。 - 写数据寄存器:设置
GPIOx_DR中的相应位,0表示输出低电平,1表示输出高电平。
具体单板:

如上图所示本喵的IMX6ULL开饭上LED2的电路图:
GPIO5_3输出低电平,LED灯亮。GPIO5_3输出低电平,LED灯灭。
按照上面的配置步骤,寻找GPIO5_3的那几个寄存器和对应的比特位:
CCM_CCGR1中的CG15:

如上图所示,CCM_CCGR1中的CG15是保留的,在IMX6ULL中,GPIO5这组GPIO默认使能,所以不用设置。CCM_CCGR1的绝对地址是0x020C4000 + 0x6C = 0x020C406C。
IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3:

如上图所示,将 IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3寄存器中的MUX_MODE4位配置为101,选择GPIO5_IO03为通用输入输出模式。该寄存器的绝对地址是0x02290000 + 0x14 = 0x02290014。
GPIO5_GDIR:
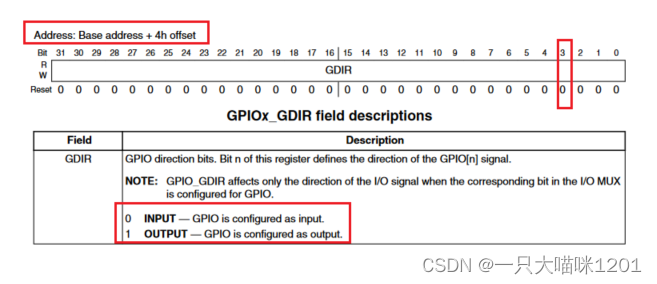
如上图,使用的是GPIO5_3IO口,所以要配置GPIO5_GDIR中的bit3,该位为1,表示输出,该位为0,表示输入。该寄存器的偏移量是0x4。
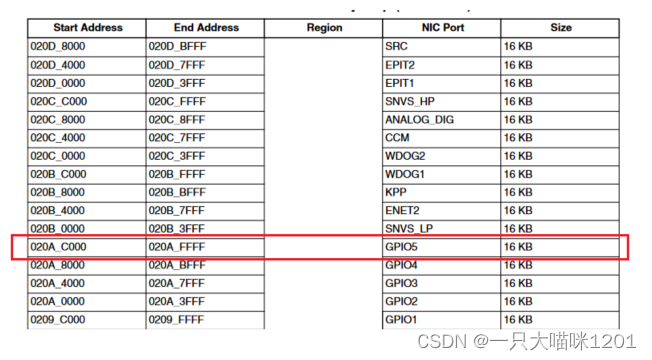
如上图所示,GPIO5的基地址是0x020AC000,所以GPIO5_GDIR的绝对地址是0x020AC000 + 0x4 = 0x020AC004。
GPIO5_DR:
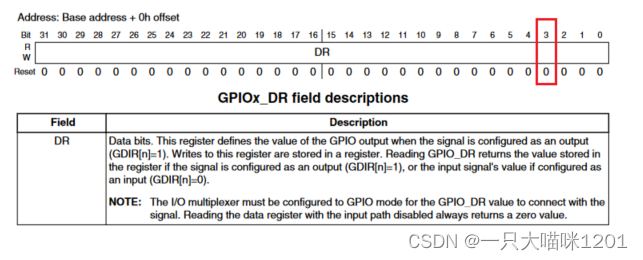
如上图所示,GPIO5_DR中的bit3设置为1,GPIO5_3就输出高电平,设置为0就输出低电平,该寄存器的地址偏移量是0x0,所以它的绝对地址就是0x020AC000 + 0x0 = 0x020AC000。
⚽编程
驱动程序
按照驱动程序框架来编写:
1. 提供file_operations并实现相应驱动函数:
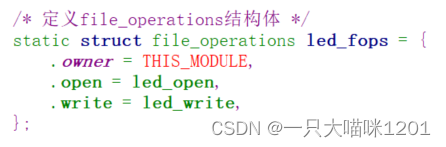
如上图所示file_operations结构体,只初始化三个成员:
-
owner是必须有的,其值是该模块所属者的指针THIS_MODULE。 -
open初始化为led_open:
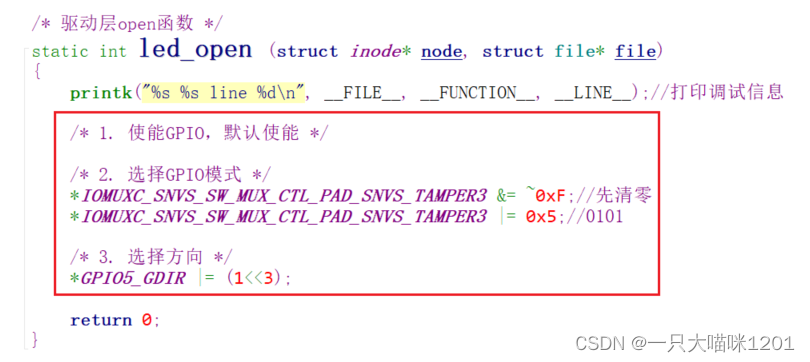
如上图所示,在led_open函数中,对GPIO5_3进行使能,功能选择以及方向选择,当应用层调用open系统调用时,最终会调用驱动层的led_open函数,对GPIO进行初始化。 -
write初始化为led_write:
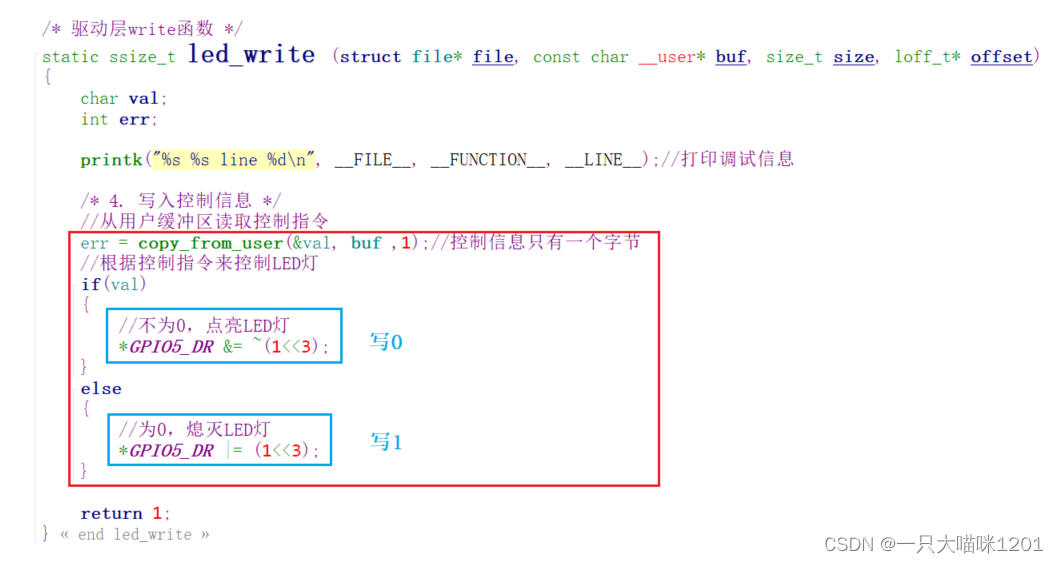
如山图所示,在led_write函数中,使用copy_from_user读取应用层调用write系统调用时写入的参数,并且复制到val中,根据该参数的逻辑值来控制LED灯的状态:
- 用户层写入非0值:向
GPIO5_DR寄存器的bit3写0,LED灯亮。 - 用户层写入0值:向
GPIO5_DR寄存器的bit3写1,LED灯灭。
2. 实现入口函数并注册设备节点:

如上图所示,创建相应寄存器的指针变量,然后在入口函数中首先使用resister_chrdev注册设备节点,然后再使用ioremap函数映射虚拟地址。然后再使用class_create和device_create为内核创建设备节点提供信息。
- 用来指向寄存器的指针使用
volatile关键字修饰,保持内存可见性。- 对于寄存器来说,有没有数据写入区别非常大,所以要保证每次操作寄存器都能写入,不被优化。
映射虚拟地址
前面查芯片手册时看到的寄存器地址是实实在在的物理地址,但是在Linux中是不允许直接操作物理地址的。
在led_open和led_write中操作寄存器时使用的指针IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3,GPIO5_GDIR,以及GPIO5_DR变量,其中的地址都是经过映射以后得到的虚拟地址。

如上图所示,在Linux系统中存在多个进程,假设此时存在两个进程,每个进程都有一个PCB结构体,里面的struct mm_struct* mm指向各自进程地址空间(也叫虚拟地址空间)。
- 不同进程的进程地址空间是相互独立的,互不影响。
- 每个进程地址空间都包含栈区,共享区,堆区,数据段,代码段等等区域。
在led_open和led_write驱动函数中使用的寄存器指针,它们属于全局变量,所以存放在使用该驱动程序进程地址空间的数据段。
如果这两个进程都会调用open和write系统调用来操作LED灯:
- 假设进程地址空间的数据段存放的是
GPIO5相关寄存器的物理地址。
进程1对GPIO5_3IO口的操作是正常的,符合规范的,但是进程2对GPIO5_3IO口的操作是违规的,如越界操作,溢出等错误操作。
由于进程1和进程2操作的是物理地址,所以进程2的错误操作会影响到进程1的正常操作,两个进程就相互影响了。
- 进程地址空间的数据段存放的是
GPIO5相关寄存器的映射后的虚拟地址。
实际上采样的就是这种方式,使用虚拟地址的方式来管理和保护内存。上图中的MMU可以把物理地址和虚拟地址建立映射关系,当操作进程地址空间中的虚拟地址时:
- MMU会先判断该操作是否合法,对物理地址形成保护,防止非法访问。
- 操作合法时,去该虚拟地址所映射的物理地址处进行操作。
此时进程1和进程2就不会互相影响,当进程2对寄存器进程非法操作时,MMU就会直接驳回它的操作请求。
- 操作系统Linux运行在保护模式下,使用虚拟内存来管理和保护内存,同一个物理地址可以被映射到不同进程的不同虚拟地址上。
- 直接访问物理地址会绕过这层保护,可能导致系统不稳定或不安全。
使用ioremap进行虚拟地址映射时:
- 第一个参数:要进行映射的物理地址。
- 第二个参数:要映射的内存大小(字节)。
由于IMX6ULL的GPIO5_3涉及到的寄存器都是32位的,也就是四个字节,所以第二个参数都是4,将使用ioremap映射后的3个虚拟地址赋值给那几个寄存器指针全局变量。
- 虽然映射的大小是4个字节,但是映射时是以 页(4KB) 为单位的,所以真正映射出来的虚拟地址大小是4KB。
3. 实现出口函数和完善驱动信息:
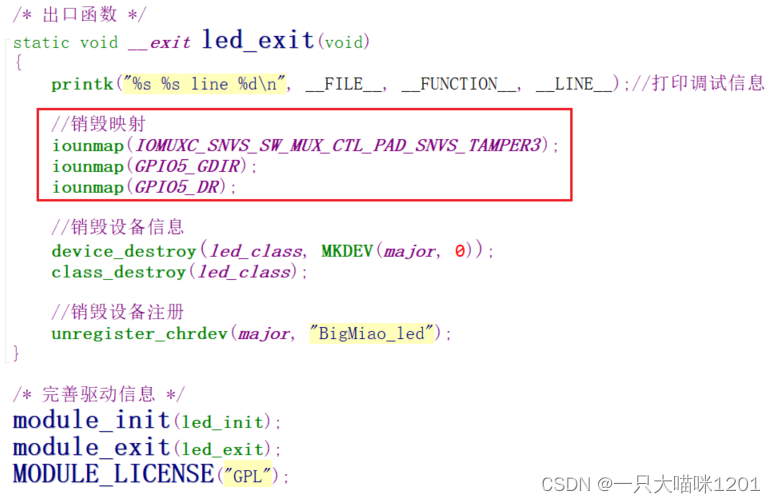
如上图所示,在出口函数中,首先要把映射的虚拟地址销毁掉,使用iounmap函数实现,只有一个参数就是映射后得到的虚拟地址。
然后就是按照驱动框架中的操作,将设备类以及设备节点全部销毁,以及销毁设备节点的注册,最后再告诉内核入口函数和出口函数,以及声明一下使用GPL开源协议。
应用层
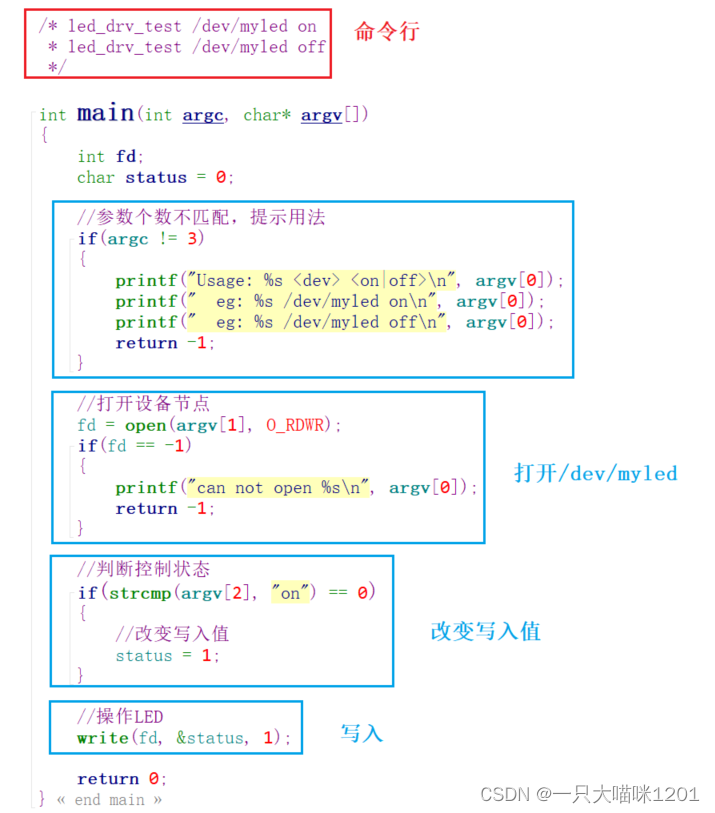
如上图所示应用层的测试代码led_drv_test.c,在执行测试程序时,命令行中输入的指令有两种:
led_drv_test /dev/myled on:表示点亮LED灯。led_drv_test /dev/myled off:表示熄灭LED灯。
在main函数中,首先判断命令行参数的个数,如果个数不为3,说明使用错误,则提示用法并直接返回-1。
参数正确以后,先打开/dev/myled目录下的设备节点,可以看到,使用的是open系统调用,应用层只把它当作一个普通文件,并不知道这是一个字符设备。
根据命令行参数中的最后一个进行判断:
- 如果是
“on”:则将后面要写入内核中的数据status修改为1。 - 如果是
"off":则不做任何修改,status使用创建时的初始值0。
最后使用write系统调用,将status这一个字节的数据写入到内核,驱动函数根据这个数据的逻辑值来判断是点亮LED灯还是熄灭LED灯。
交叉编译和前面hello驱动程序一样,只是需要对Makefile文件稍作修改:
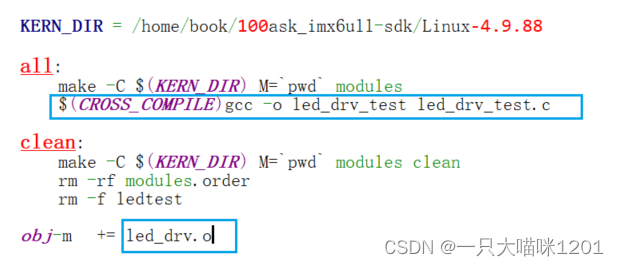
最后在IMX6ULL上挂载的跟文件系统中使用insmod led_drv.ko按照myled设备节点,然后执行led_drv_test测试程序就可以点亮和熄灭LED灯了,这里本喵就不贴板子的效果图了。
🏀总结
通过和硬件无关的hello驱动程序来引出驱动程序的框架。然后使用该框架实现了IMX6ULL单板上LED灯的驱动程序。