什么是ETCD
- CoreOS基于Raft开发的分布式key-value存储,可用于服务发现、共享配置以及一致性保障(如数据库选主、分布式锁等)
- etcd像是专门为集群环境的服务发现和注册而设计,它提供了数据TTL失效、数据改变监视、多值、目录监听、分布式锁原子操作等功能,可以方便的跟踪并管理集群节点的状态
特点:
- 键值对存储:将数据存储在分层组织的目录中,如同在标准文件系统中
监测变更:监测特定的键或目录以进行更改,并对值的更改做出反应 - 简单: curl可访问的用户的API(HTTP+JSON)
- 安全: 可选的SSL客户端证书认证
- 快速: 单实例每秒1000次写操作,2000+次读操作
- 可靠: 使用Raft算法保证一致性
主要功能
- key-value存储
- 监听机制
- key的过期及续约机制,用于监控和服务发现
- 基于监听机制的分布式异步系统
键值对存储
- 采用kv型数据存储,一般情况下比关系型数据库快
- 支持动态存储(内存)以及静态存储(磁盘)
- 分布式存储,可集成为多节点集群
- 存储方式,采用类似目录结构。(B+tree)
- 只有叶子节点才能真正存储数据,相当于文件
- 叶子节点的父节点一定是目录,目录不能存储数据
服务注册与发现
- 强一致性、高可用的服务存储目录
- 基于 Raft 算法的 etcd 天生就是这样一个强一致性、高可用的服务存储目录
- 一种注册服务和服务健康状况的机制
- 用户可以在 etcd 中注册服务,并且对注册的服务配置 key TTL,定时保持服务的心跳以达到监控健康状态的效果
消息发布与订阅
- 在分布式系统中,最适用的一种组件间通信方式就是消息发布与订阅
- 即构建一个配置共享中心,数据提供者在这个配置中心发布消息,而消息使用者则订阅他们
- 关心的主题,一旦主题有消息发布,就会实时通知订阅者
- 通过这种方式可以做到分布式系统配置的集中式管理与动态更新
- 应用中用到的一些配置信息放到etcd上进行集中管理
- 应用在启动的时候主动从etcd获取一次配置信息,同时,在etcd节点上注册一个Watcher并等待,以后每次配置有更新的时候,etcd都会实时通知订阅者,以此达到获取最新配置信息的目的
核心:TTL & CAS
- TTL(time to live)指的是给一个key设置一个有效期,到期后这个key就会被自动删掉,这在
很多分布式锁的实现上都会用到,可以保证锁的实时有效性 - Atomic Compare-and-Swap(CAS)指的是在对key进行赋值的时候,客户端需要提供一些条
件,当这些条件满足后,才能赋值成功。这些条件包括
• prevExist:key当前赋值前是否存在
• prevValue:key当前赋值前的值
• prevIndex:key当前赋值前的Index
- key的设置是有前提的,需要知道这个key当前的具体情况才可以对其设置
Raft 协议
概览
- Raft协议基于quorum机制,即大多数同意原则,任何的变更都需超过半数的成员确认
learner
- Raft 4.2.1引入的新角色
- 当出现一个etcd集群需要增加节点时,新节点与Leader的数据差异较大,需要较多数据同步才能跟上leader的最新的数据
- 此时Leader的网络带宽很可能被用尽,进而使得leader无法正常保持心跳
- 进而导致follower重新发起投票
- 进而可能引发etcd集群不可用
- Learner角色只接收数据而不参与投票,因此增加learner节点时,集群的quorum不变
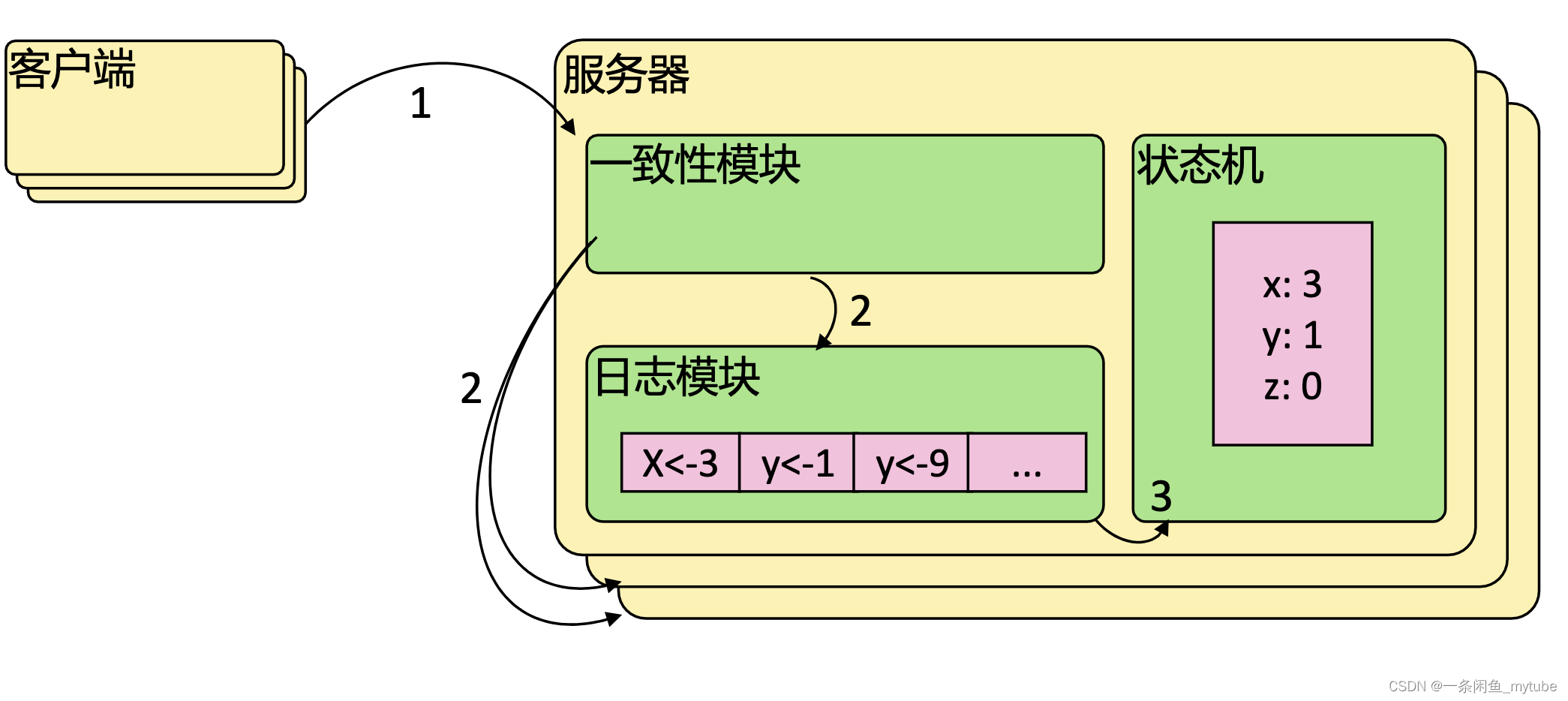
etcd基于Raft的一致性
- 初始启动时,节点处于follower状态并被设定一个election timeout,如果在这一时间周期内没有收到
来自 leader 的 heartbeat,节点将发起选举:将自己切换为 candidate 之后,向集群中其它 follower
节点发送请求,询问其是否选举自己成为 leader - 当收到来自集群中过半数节点的接受投票后,节点即成为 leader,开始接收保存 client 的数据并向其它
的 follower 节点同步日志。如果没有达成一致,则candidate随机选择一个等待间隔(150ms ~
300ms)再次发起投票,得到集群中半数以上follower接受的candidate将成为leader - leader节点依靠定时向 follower 发送heartbeat来保持其地位
- 任何时候如果其它 follower 在 election timeout 期间都没有收到来自 leader 的 heartbeat,同样会将
自己的状态切换为 candidate 并发起选举。每成功选举一次,新 leader 的任期(Term)都会比之前
leader 的任期大1。
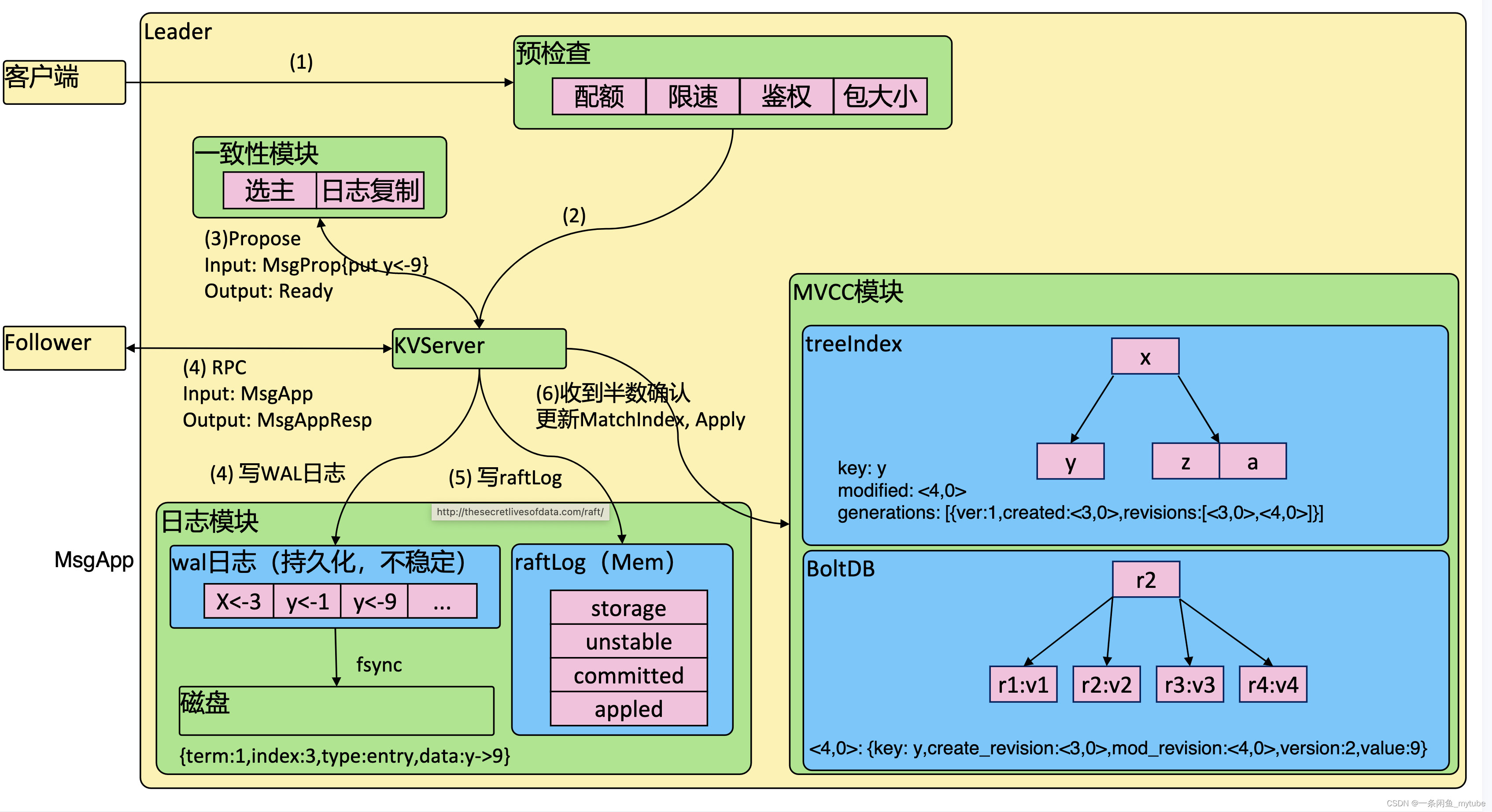
日志复制
- 当接Leader收到客户端的日志(事务请求)后先把该日志追加到本地的Log中,然后通过
heartbeat把该Entry同步给其他Follower,Follower接收到日志后记录日志然后向Leader发送
ACK,当Leader收到大多数(n/2+1)Follower的ACK信息后将该日志设置为已提交并追加到
本地磁盘中,通知客户端并在下个heartbeat中Leader将通知所有的Follower将该日志存储在自
己的本地磁盘中。
安全性
- 用于保证每个节点都执行相同序列的安全机制
- Safety就是用于保证选举出来的Leader一定包含先前 committed Log的机制
- 选举安全性(Election Safety):每个任期(Term)只能选举出一个Leade
- Leader完整性(Leader Completeness):指Leader日志的完整性,当Log在任期Term1被
Commit后,那么以后任期Term2、Term3…等的Leader必须包含该Log;Raft在选举阶段就使
用Term的判断用于保证完整性:当请求投票的该Candidate的Term较大或Term相同Index更大
则投票,否则拒绝该请求
失效处理
- 1 Leader失效:其他没有收到heartbeat的节点会发起新的选举,而当Leader恢复后由于步进
数小会自动成为follower(日志也会被新leader的日志覆盖) - 2 follower节点不可用:follower 节点不可用的情况相对容易解决。因为集群中的日志内容始
终是从 leader 节点同步的,只要这一节点再次加入集群时重新从 leader 节点处复制日志即可。 - 3 多个candidate:冲突后candidate将随机选择一个等待间隔(150ms ~ 300ms)再次发起
投票,得到集群中半数以上follower接受的candidate将成为leader
wal日志
- 数据结构LogEntry
- 字段type,只有两种,
一种是0表示Normal,1表示ConfChange(ConfChange表示 Etcd 本身的配置变更同步,比如有新的节点加入等) - term,每个term代表一个主节点的任期,每次主节点变更term就会变化
- index,这个序号是严格有序递增的,代表变更序号
- data,将raft request对象的pb结构整个保存下
- 一致性都通过同步wal日志来实现,每个节点将从主节点收到的data apply到本地的存储,Raft只关心日志的同步状态
- 如果本地存储实现的有bug,比如没有正确的将data apply到本地,也可能会导致数据不一致。
etcd v3 存储,Watch以及过期机制
-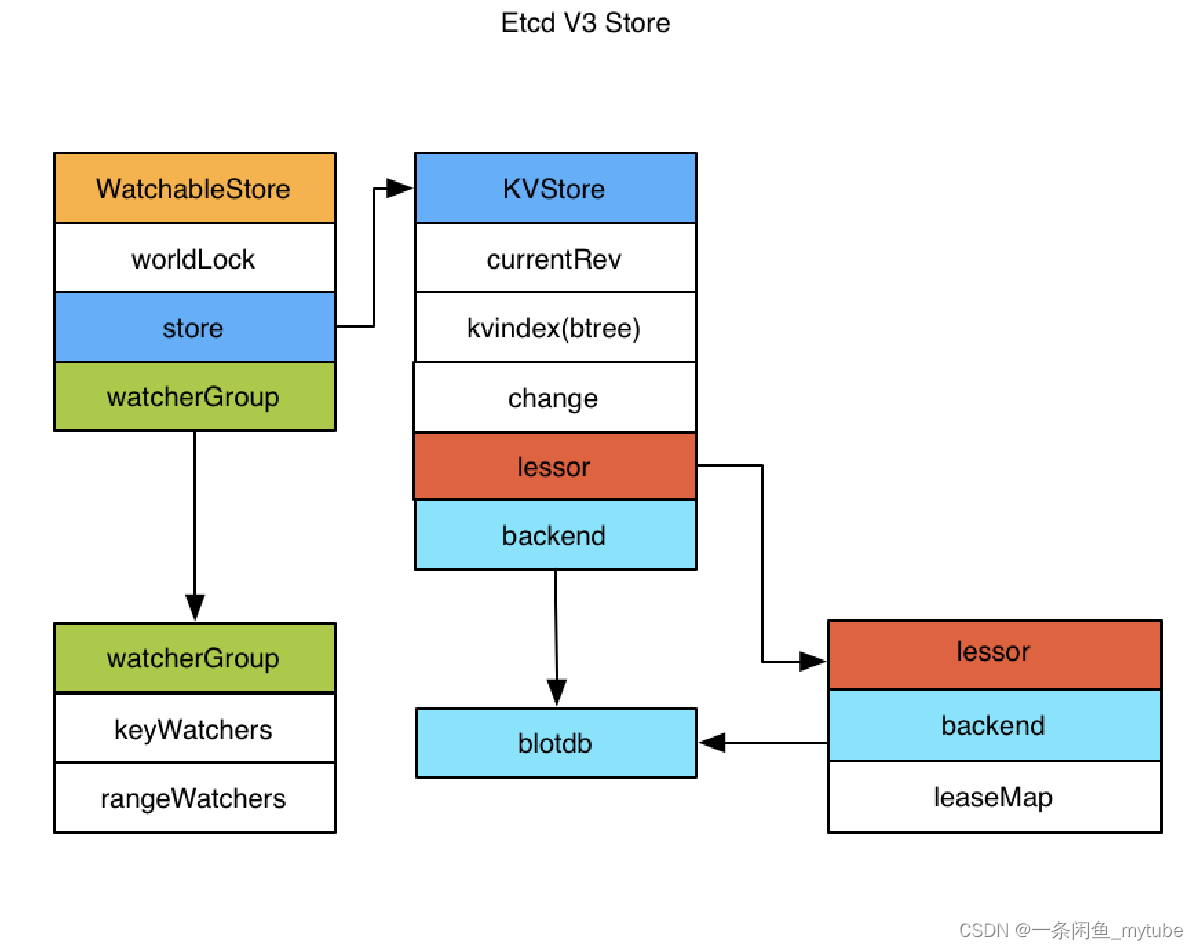
存储机制
- 一部分是内存中的索引,kvindex,是基于Google开源的一个Golang的btree实现的
- 另外一部分是后端存储
- backend可以对接多种存储,当前使用的boltdb
- boltdb是一个单机的支持事务的kv存储,etcd 的事务是基于boltdb的事务实现的
- etcd 在boltdb中存储的key是reversion,value是 etcd 自己的key-value组合,也就是说 etcd 会在boltdb中把每个版都保存下,从而实现了多版本机制
- reversion主要由两部分组成,第一部分main rev,每次事务进行加一,第二部分sub rev,同一
个事务中的每次操作加一 - etcd 提供了命令和设置选项来控制compact,同时支持put操作的参数来精确控制某个key的历史版本数
- 内存kvindex保存的就是key和reversion之前的映射关系,用来加速查询
Watch机制
-
etcd v3 的watch机制支持watch某个固定的key,也支持watch一个范围
- watchGroup 包含两种watcher,一种是 key watchers,数据结构是每
个key对应一组watcher,另外一种是 range watchers, 数据结构是一个 IntervalTree,方便通
过区间查找到对应的watcher
- watchGroup 包含两种watcher,一种是 key watchers,数据结构是每
-
每个 WatchableStore 包含两种 watcherGroup,一种是synced,一种是unsynced,
前者表示该group的watcher数据都已经同步完毕,在等待新的变更,后者表示该group的
watcher数据同步落后于当前最新变更,还在追赶- 当 etcd 收到客户端的watch请求,如果请求携带了revision参数,则比较请求的revision和
store当前的revision,如果大于当前revision,则放入synced组中,否则放入unsynced组 - etcd 会启动一个后台的goroutine持续同步unsynced的watcher,然后将其迁移到synced组
- etcd v3 支持从任意版本开始watch,没有v2的1000条历史event表限制的问题(当然这是指没有compact的情况下)
- 当 etcd 收到客户端的watch请求,如果请求携带了revision参数,则比较请求的revision和
etcd 成员重要参数
成员相关参数
–name ‘default’
Human-readable name for this member.
–data-dir ‘${name}.etcd’
Path to the data directory.
–listen-peer-urls ‘http://localhost:2380’
List of URLs to listen on for peer traffic.
–listen-client-urls ‘http://localhost:2379’
List of URLs to listen on for client tra
etcd集群重要参数
–initial-advertise-peer-urls ‘http://localhost:2380’
List of this member’s peer URLs to advertise to the rest of the cluster.
–initial-cluster ‘default=http://localhost:2380’
Initial cluster configuration for bootstrapping.
–initial-cluster-state ‘new’
Initial cluster state (‘new’ or ‘existing’).
–initial-cluster-token ‘etcd-cluster’
Initial cluster token for the etcd cluster during bootstrap.
–advertise-client-urls ‘http://localhost:2379’
List of this member’s client URLs to advertise to the public
etcd安全相关参数
–cert-file ‘’
Path to the client server TLS cert file.
–key-file ‘’
Path to the client server TLS key file.
–client-crl-file ‘’
Path to the client certificate revocation list file.
–trusted-ca-file ‘’
Path to the client server TLS trusted CA cert file.
–peer-cert-file ‘’
Path to the peer server TLS cert file.
–peer-key-file ‘’
Path to the peer server TLS key file.
–peer-trusted-ca-file ‘’
Path to the peer server TLS trusted CA file
灾备
• 创建Snapshot
etcdctl --endpoints https://127.0.0.1:3379 --cert /tmp/etcd-certs/certs/127.0.0.1.pem –
key /tmp/etcd-certs/certs/127.0.0.1-key.pem --cacert /tmp/etcd-certs/certs/ca.pem
snapshot save snapshot.db
• 恢复数据
etcdctl snapshot restore snapshot.db
–name infra2
–data-dir=/tmp/etcd/infra2
–initial-cluster
infra0=http://127.0.0.1:3380,infra1=http://127.0.0.1:4380,infra2=http://127.0.0.1:5380
–initial-cluster-token etcd-cluster-1
–initial-advertise-peer-urls http://127.0.0.1:538
容量管理
- 单个对象不建议超过1.5M
- 默认容量2G
- 不建议超过8G
Alarm & Disarm Alarm
• 设置etcd存储大小
$ etcd --quota-backend-bytes=$((1610241024))
• 写爆磁盘
$ while [ 1 ]; do dd if=/dev/urandom bs=1024 count=1024 | ETCDCTL_API=3 etcdctl put key
|| break; done
• 查看endpoint状态
$ ETCDCTL_API=3 etcdctl --write-out=table endpoint status
• 查看alarm
$ ETCDCTL_API=3 etcdctl alarm list
• 清理碎片
$ ETCDCTL_API=3 etcdctl defrag
• 清理alarm
$ ETCDCTL_API=3 etcdctl alarm disarm
碎片整理
keep one hour of history
$ etcd --auto-compaction-retention=1
compact up to revision 3
$ etcdctl compact 3
$ etcdctl defrag
Finished defragmenting etcd member[127.0.0.1:2379]
高可用etcd解决方案
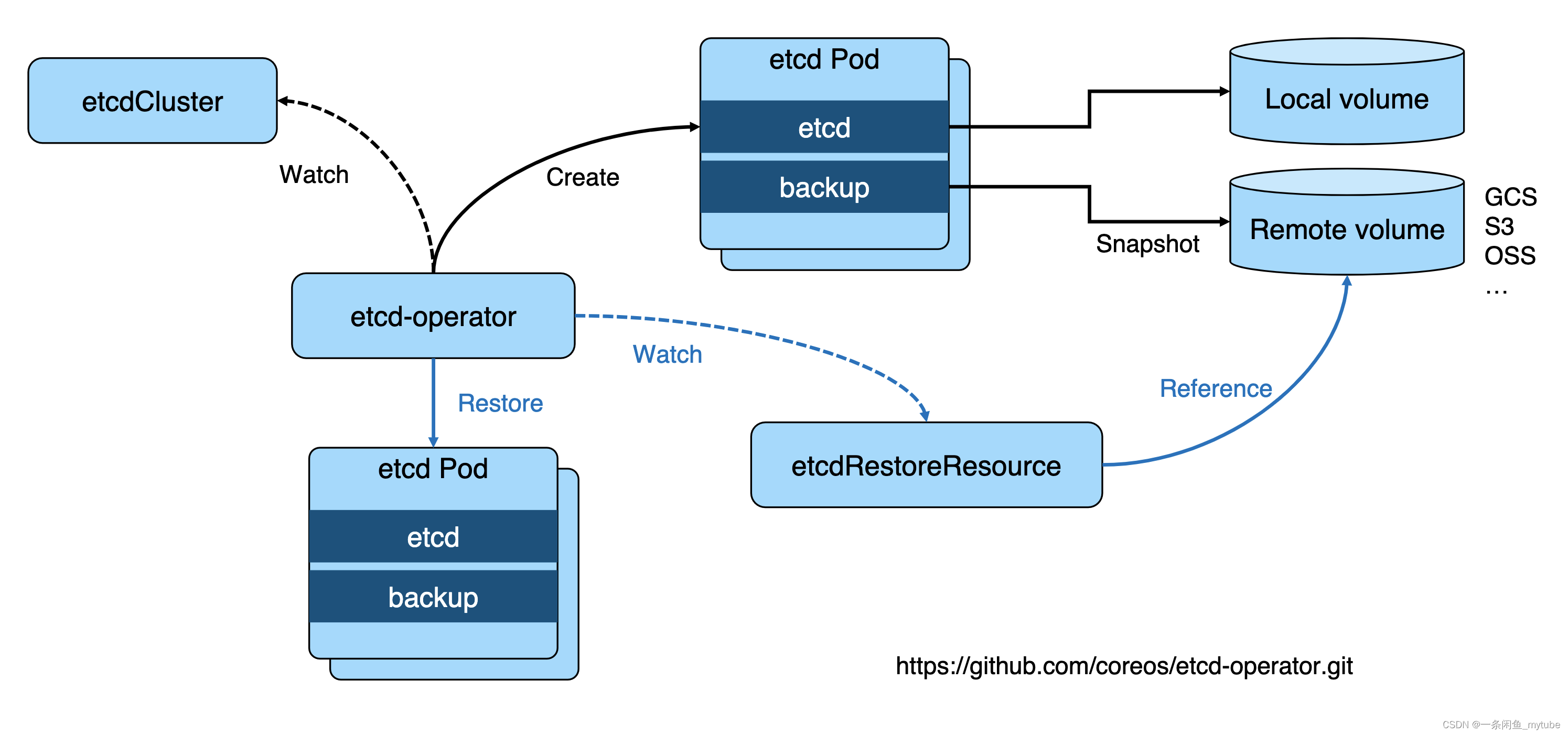
etcd-operator: coreos开源的,基于kubernetes CRD完成etcd集群配置。Archived
https://github.com/coreos/etcd-operator
Etcd statefulset Helm chart: Bitnami(powered by vmware)
https://bitnami.com/stack/etcd/helm
https://github.com/bitnami/charts/blob/master/bitnami
Etcd Operato
基于 Bitnami 安装etcd高可用集群
• 安装helm
https://github.com/helm/helm/releases
• 通过helm安装etcd
helm repo add bitnami https://charts.bitnami.com/bitnami
helm install my-release bitnami/etcd
• 通过客户端与serve交互
kubectl run my-release-etcd-client --restart=‘Never’ --image
docker.io/bitnami/etcd:3.5.0-debian-10-r94 --env ROOT_PASSWORD=$(kubectl get
secret --namespace default my-release-etcd -o jsonpath=“{.data.etcd-root-password}” |
base64 --decode) --env ETCDCTL_ENDPOINTS=“my-release-
etcd.default.svc.cluster.local:2379” --namespace default --command – sleep infinity
Kubernetes如何使用etcd
-
etcd是kubernetes的后端存储
-
对于每一个kubernetes Object,都有对应的storage.go 负责对象的存储操作
- pkg/registry/core/pod/storage/storage.go
-
API server 启动脚本中指定etcd servers集群
spec:
containers:
- command:
- kube-apiserver
- --advertise-address=192.168.34.2
- --enable-bootstrap-token-auth=true
- --etcd-cafile=/etc/kubernetes/pki/etcd/ca.crt
- --etcd-certfile=/etc/kubernetes/pki/apiserver-etcd-client.crt
- --etcd-keyfile=/etc/kubernetes/pki/apiserver-etcd-client.key
- --etcd-servers=https://127.0.0.1:237
Kubernets对象在etcd中的存储路径
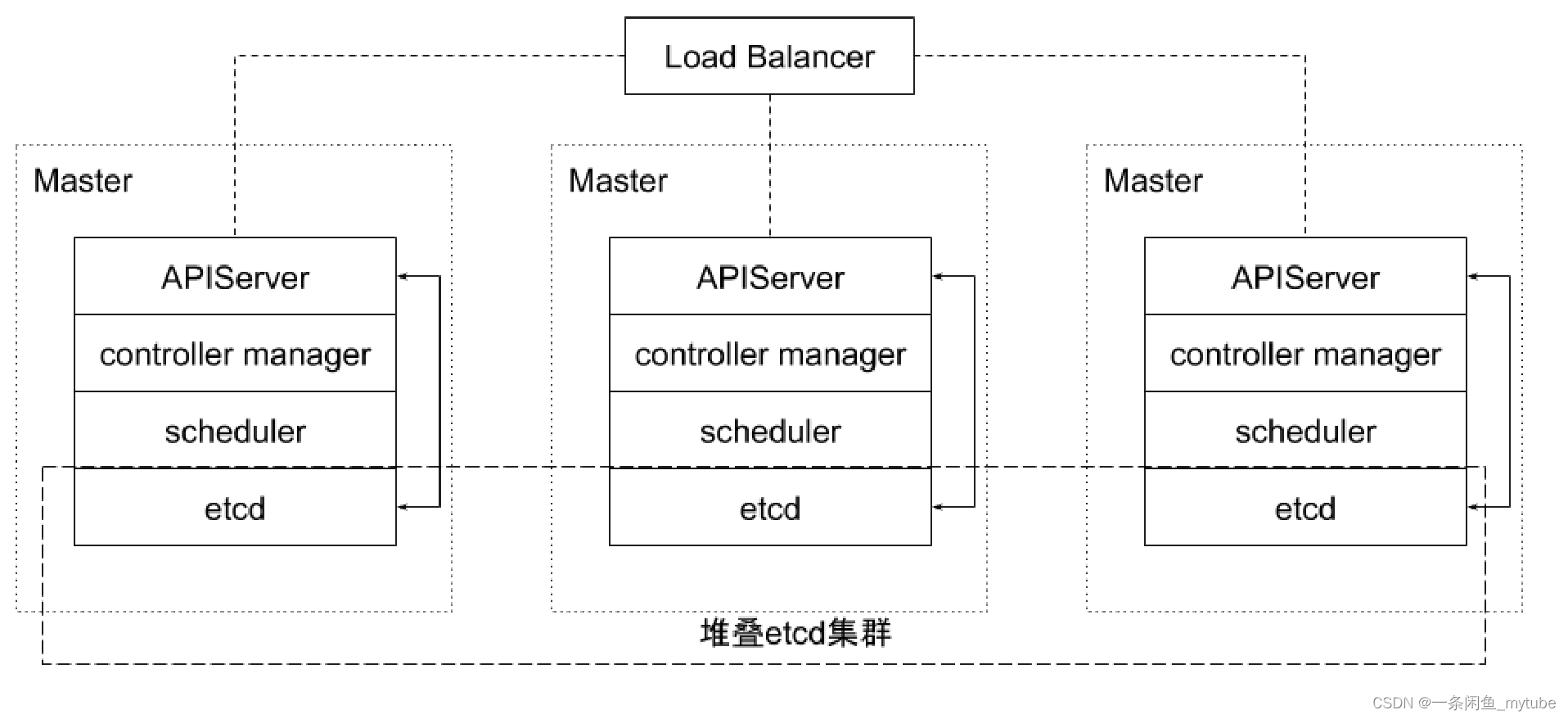
etcd在集群中所处的位置

堆叠式etcd集群的高可用拓扑
- 这种拓扑将相同节点上的控制平面和etcd成员耦合在一起。优点在于建立起来非常容易,并且对副本的管理也更容易
- 堆叠式存在耦合失败的风险,如果一个节点发生故障,则etcd成员和控制平面实例都会丢失,并且集群冗余也会受到损害
- 可以通过添加更多控制平面节点来减轻这种风险。因此为实现集群高可用应该至少运行三个堆叠的Master节点
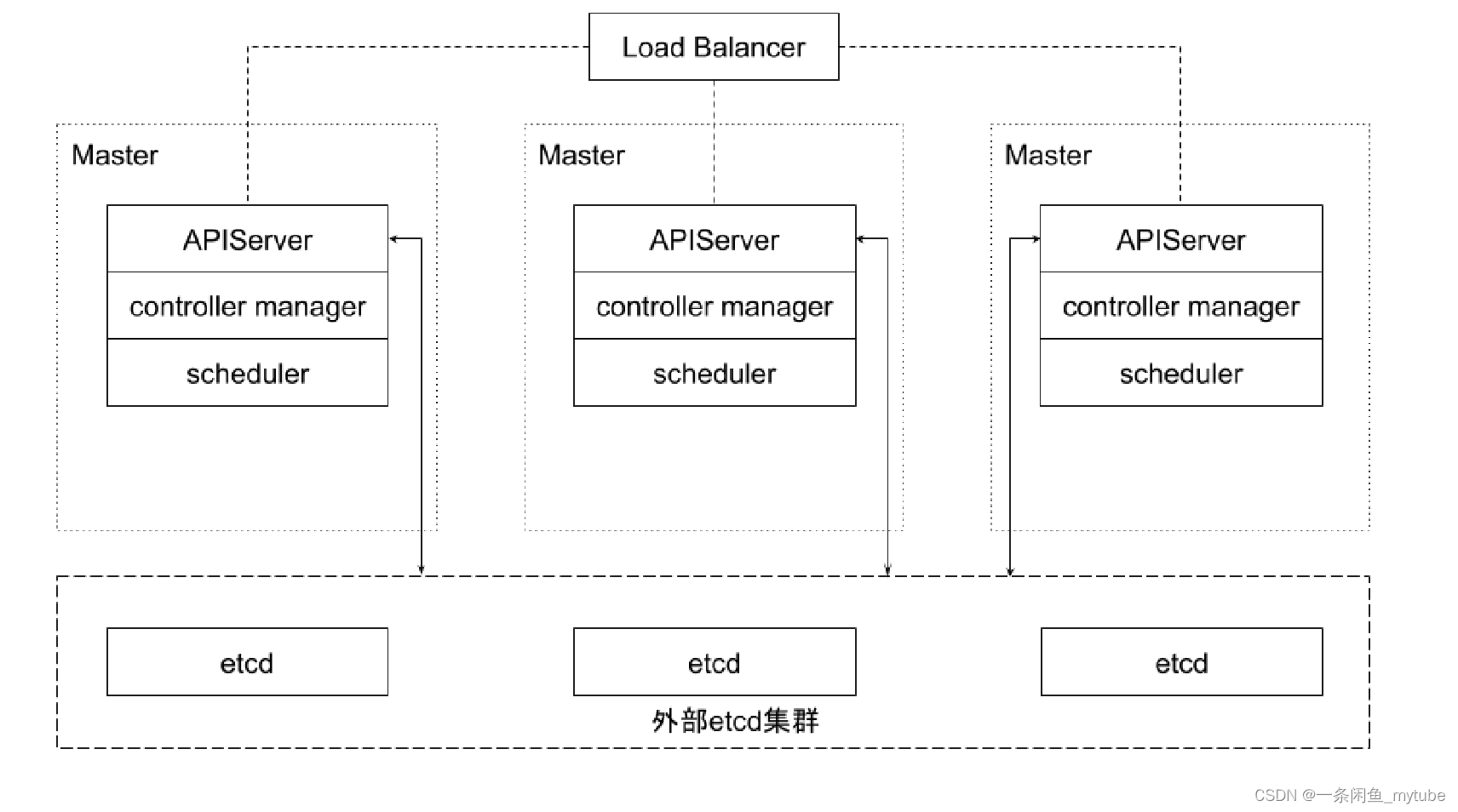
外部etcd集群的高可用拓扑
- 该拓扑将控制平面和etcd成员解耦。如果丢失一个Master节点,对etcd成员的影响较小,并
且不会像堆叠式拓扑那样对集群冗余产生太大影响。但是,此拓扑所需的主机数量是堆叠式拓
扑的两倍。具有此拓扑的群集至少需要三个主机用于控制平面节点,三个主机用于etcd集群
实践 - etcd集群高可用
- 保证高可用是首要目标
- 所有写操作都要经过leader
- apiserver的配置只连本地的etcd peer
- apiserver的配置指定所有etcd peers,但只有当前连接的etcd member异常,apiserver才会换目标
实践 - etcd集群高可用
• apiserver和etcd 部署在同一节点
• apiserver和etcd之间的通讯基于gRPC
➢ 针对每一个object,apiserver和etcd之间的Connection -> stream 共享
➢ http2的特性
➢ Stream quota
➢ 带来的问题?对于大规模集群,会造成链路阻塞
➢ 10000个pod,一次list操作需要返回的数据可能超过100M
实践 – etcd存储规划
本地 vs 远程
- Remote Storage
- 优势是假设永远可用
- 劣势是IO效率
- 最佳实践
- Local SSD
- 利用local volume分配空间
多少空间
- 与集群规模相关
安全性
-
peer和peer之间的通讯加密
- 是否有需求
- TLS的额外开销
- 运营复杂度增加
-
数据加密
- Kubernetes提供了针对secret的加密
-
事件分离
- 对于大规模集群,大量的事件会对etcd造成压力
- API server 启动脚本中指定etcd servers集群
减少网络延迟
- 数据中心内的RTT大概是数毫秒,国内的典型RTT约为50ms,两大洲之间的RTT可能慢至
400ms。因此建议etcd集群尽量同地域部署 - 当客户端到Leader的并发连接数量过多,可能会导致其他Follower节点发往Leader的请求因
为网络拥塞而被延迟处理
可以在节点上通过流量控制工具(Traffic Control)提高etcd成员之间发送数据的优先级来避免
减少磁盘I/O延迟
- 强烈建议使用SSD
- 典型的旋转磁盘写延迟约为10毫秒
- SSD(Solid State Drives,固态硬盘),延迟通常低于1毫秒
- 将etcd的数据存放在单独的磁盘内
- ionice命令对etcd服务设置更高的磁盘I/O优先级,尽可能避免其他进程的影响
$ ionice -c2 -n0 -p 'pgrep etcd'
保持合理的日志文件大小
- tcd以日志的形式保存数据,无论是数据创建还是修改,它都将操作追加到日志文件,因此日志
文件大小会随着数据修改次数而线性增长 - 当Kubernetes集群规模较大时,其对etcd集群中的数据更改也会很频繁,集群日记文件会迅速
增长 - etcd会以固定周期创建快照保存系统的当前状态,并移除旧日志文
件。另外当修改次数累积到一定的数量(默认是10000,通过参数“–snapshot-count”指
定),etcd也会创建快照文件 - 如果etcd的内存使用和磁盘使用过高,可以先分析是否数据写入频度过大导致快照频度过高,确
认后可通过调低快照触发的阈值来降低其对内存和磁盘的使用
设置合理的存储配额
- 存储空间的配额用于控制etcd数据空间的大小
- 合理的存储配额可保证集群操作的可靠性
- etcd的性能会因为存储空间的持续增长而严重下降
- 甚至有耗完集群磁盘空间导致不可预测集群行为的风险
自动压缩历史版本
- “–auto-compaction”,其值以小时为单位。也就是etcd会自动压缩该值设置的时间窗口之
前的历史版本
定期消除碎片化
- 压缩历史版本,相当于离散地抹去etcd存储空间某些数据,etcd存储空间中将会出现碎片
- 定期消除存储碎片,将释放碎片化的存储空间,重新调整整个存储空间
- 备份方案
- etcd备份:备份完整的集群信息,灾难恢复
- etcdctl snapshot save
- 备份Kubernetes event
- 频度
- 时间间隔太长
- 如果有外部资源配置,如负载均衡等,能否接受数据丢失导致的leak
- 时间间隔太短
- 做snapshot的时候,etcd会锁住当前数据
- 并发的写操作需要开辟新的空间进行增量写,导致磁盘空间增长
- 时间间隔太长
- 如何保证备份的时效性,同时防止磁盘爆掉
- Auto defrag
优化运行参数
- 通过调整心跳周期(Heatbeat Interval)和选举超时时间(Election
Timeout),来降低Leader选举的可能性- 心跳周期参数推荐设置为接近etcd多个成员之间平均数据往返周期的最大值,一般是平均RTT的0.55-1.5倍
- 选举超时时间最少设置为etcd成员之间RTT时间的10倍
etcd备份存储
- 两个子目录:wal和snap
- 所有数据的修改在提交前,都要先写入wal中
- snap是用于存放快照数据,为防止wal文件过多,etcd会定期(当wal中数据超过10000条记录时,由参数“–snapshot-count”设置)创建快照。当快照生成后,wal中数据就可以被删除了
- 数据遭到破坏或错误修改需要回滚到之前某个状态
- 一是从快照中恢复数据主体,但是未被拍入快照的数据会丢失
- 而是执行所有WAL中记录的修改操作,从最原始的数据恢复到数据损坏之前的状态,但恢复的时间较长
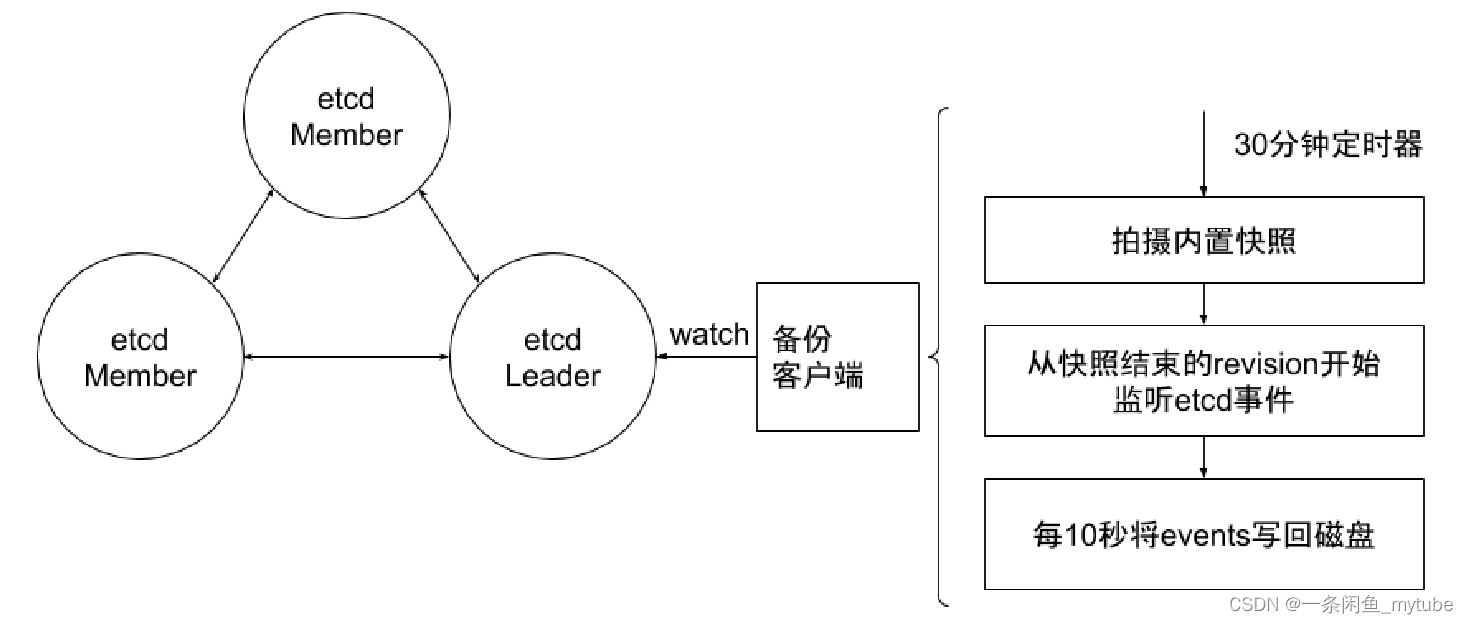
备份方案实践
- 备份程序每30分钟触发一次快照的拍摄。紧接着它从快照结
束的版本(Revision)开始,监听etcd集群的事件,并每10秒钟将事件保存到文件中,并将快照和事件文件
上传到网络存储设备中。 - 30分钟的快照周期对集群性能影响甚微。当大灾难来临时,也至多丢失10秒的数据。
至于数据修复,首先把数据从网络存储设备中下载下来,然后从快照中恢复大块数据,并在此基础上依次应
用存储的所有事件。这样就可以将集群数据恢复到灾难发生前
refer 云原生训练营
常联系,如果您看完了
- wx: tutengdihuang
- 群如下