提前准备好游戏要的素材,可以到爱给网去找,飞机大战我们需要的是一个我方战机图片,一个背景图,三个敌方战机的图,我方战机的图片,敌方战机的图片,并且将图片和.cpp放在同一文件夹下.
这里创建.cpp的文件是因为要用到图形库,所以创建.cpp的文件,然后图片格式都是png
1.我方飞机和背景图片的加载和贴图
#include<stdio.h>
#include <graphics.h>//图形库头文件
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane;//定义背景图片,玩家的类int main()
{initgraph(WIDTH, HEIGHT);//初始化游戏的背景loadimage(&img_bk, "./back.png");//加载游戏背景图loadimage(&img_plane, "./1.png");//加载游戏玩家图片putimage(0, 0, &img_bk);//贴游戏背景图putimage(200,200, &img_plane);//贴玩家战机的图片getchar();//防止窗口闪退}
背景图片是503*700,背景图片大小自己设置,为了让游戏体验感增强,如果铺满整个屏幕的话,会不好移动.
2.去掉飞机背后的黑色背景,使用一个算法函数
#include<stdio.h>
#include <graphics.h>
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane;
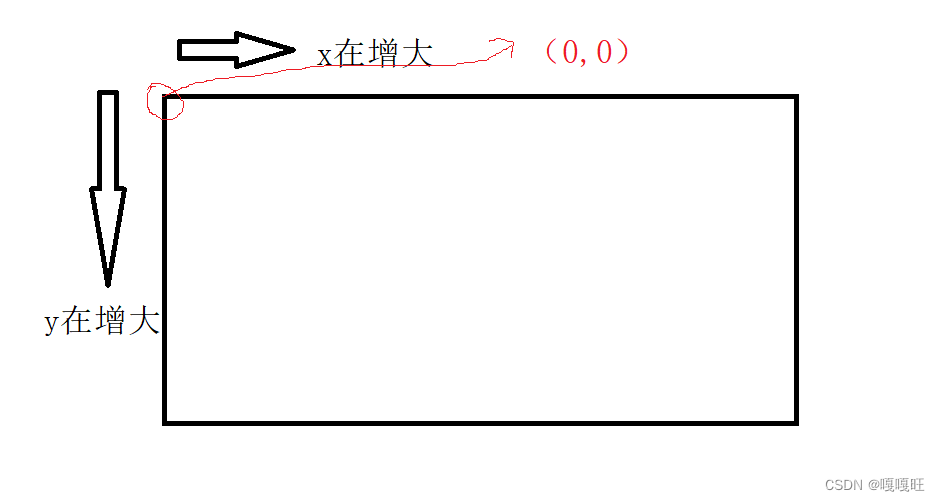
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}int main()
{initgraph(WIDTH, HEIGHT);loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");putimage(0, 0, &img_bk);//贴背景前两个为图片左上角要贴在窗口的坐标drawAlpha(&img_plane, 200, 200);//贴飞机图片getchar();}
这个函数我看不懂,是在网上搜的,我来解释一下三个参数,第一个是图片的地址,第二个参数,第三个参数的坐标是图片左上角从窗口的哪个位置贴,背景肯定是从窗口的左上角贴.
注意:使用这个函数在飞机移动屏幕过程中,会出现异常,不知道怎么解决,希望有大佬可以帮帮我,drawAlpha区别putimage可以把背景变透明

3.静态显示所有素材图片
#include<stdio.h>
#include <graphics.h>
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane, img_a, img_b, img_c,img_abullet,img_bbullet,img_cbullet,img_planebullet;
struct aircraft
{int x, y;};
aircraft plane, a, b, c;
void datainit()
{plane = { 150,150 };a = { 0,0 };b = { 300,0 };c = { 450,0 };}
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}
void load()
{loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");loadimage(&img_a, "./2.png");loadimage(&img_b, "./3.png");loadimage(&img_c, "./4.png");loadimage(&img_abullet, "./5.png");loadimage(&img_bbullet, "./6.png");loadimage(&img_cbullet, "./7.png");loadimage(&img_planebullet, "./8.png");}
void draw()
{putimage(0, 0, &img_bk);drawAlpha(&img_plane,plane.x,plane.y);drawAlpha(&img_a, a.x, a.y);drawAlpha(&img_b, b.x, b.y);drawAlpha(&img_c, c.x, c.y);drawAlpha(&img_abullet,400,0 );//后两个参数是图片左上角在窗口要贴的位置drawAlpha(&img_bbullet,400 ,50 );drawAlpha(&img_cbullet, 400, 100);drawAlpha(&img_planebullet, 400, 150);}int main()
{initgraph(WIDTH, HEIGHT);datainit();load();draw();getchar();}
定义3个敌方战机,a,b,c,3个敌机的子弹abullet,bbullet,cbullet,我方战机的子弹planebullet
IMAGE img_a, img_b, img_c,img_abullet,img_bbullet,img_cbullet,img_planebullet;
定义一个结构体记录每个图片左上角要贴在窗口的坐标.四个结构体表示我方战机,3个敌方战机在窗口上的坐标,图中的初始化只是为了让图片不重叠而已。
将加载图片的函数统一放在load函数里面,将贴图片的函数放在draw中.

4.我方飞机的移动
void player_move(int speed) //处理飞机移动
{if (GetAsyncKeyState(VK_UP) || GetAsyncKeyState('W')){if (plane.y > 0)plane.y -= speed;}if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 126< HEIGHT)plane.y += speed;}if (GetAsyncKeyState(VK_LEFT) || GetAsyncKeyState('A')){if (plane.x > 0)plane.x -= speed;}if (GetAsyncKeyState(VK_RIGHT) || GetAsyncKeyState('D')){if (plane.x + 51 < WIDTH)plane.x += speed;}
}
这个移动函数在之前游戏里用了好多次,这里就不强调了.函数中的speed参数是我方战机的速度,每按一次会移动几个像素.这里的重点放在飞机边界的判断上,记得加双缓冲,要不然,屏幕会闪

边界的判断以及飞机的移动
if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 126< HEIGHT)plane.y += speed;}
这里加126是为了不让程序出现异常,如果正常的话应该加51,因为我方战机图片大小是51*51;如果是51的话会出现如下视频的错误,不知道为什么,请看vcr
5.敌方战机的移动
首先我们要修改一下飞机结构体的变量
struct aircraft
{int x, y;int width;//敌机图片的宽度int height;//敌机图片的高度int speed;//敌机的速度int bornflag;//敌机在窗口里面置0,在外面置1};
然后修改一下初始话敌机的属性.
void datainit()
{plane = { 150,150 };//a = { 0,0 };/*b = { 300,0 };*//*c = { 450,0 };*/a.speed = 1;//a敌机的速度a.bornflag = 1;//a敌机是否存在b.bornflag = 1;c.bornflag = 1;a.width = 100;//a敌机的宽度a.height = 100;//a敌机的高度b.speed = 1;b.width = 80;b.height = 100;c.height = 70;c.width = 70;c.speed = 3;}
敌机a的移动
敌机a的移动
如视频所示,对应的代码实现是
void ufoamove()
{static int dir1 = 1;if (a.bornflag == 1){a.bornflag = 0;a.x = rand() % (WIDTH - a.width);a.y = -50;}if (a.y > 200){dir1 = 0;}else if (a.y < -150){dir1 = 1;a.bornflag = 1;}if (1 == dir1){a.y += a.speed;}else{a.y -= a.speed;}}
定义一个静态变量dir,dir为1的话,表示敌机前进,dir为0,敌机后退。因为是static,所以只有第一次初始化时候是1,别的时候不执行第一句.当敌机a没在窗口里面,说明a.bornflag == 1,就将a.bornflag 置为0,敌机a要出现了,随机数生成敌机a要出现的左右方向哪个地方,y=-50;是为了初始化的时候隐藏飞机.当敌机a前进200个像素时,dir置0,让敌机a后退.当敌机向上退出屏幕50个像素时,重新dir=1;敌机向前.此时会出现在另一个位置。在主函数中加入产生随机种子函数
srand(time(NULL));
包含头文件
#include<time.h>
#include<stdlib.h>
敌机出屏幕,drawAlpha这个函数会出错,所以我们把draw中的drawAlpha都改成putimage,这样黑框框又出现了,(电子叹气)
void draw()
{putimage(0, 0, &img_bk);putimage(plane.x, plane.y ,&img_plane );putimage(a.x, a.y ,&img_a);putimage(b.x, b.y ,&img_b );putimage(c.x, c.y, &img_c );putimage(400, 0 ,&img_abullet );putimage(400, 50 ,&img_bbullet);putimage(400, 100 ,&img_cbullet );putimage(400, 150, &img_planebullet );}
敌机b的移动
请看vcr
敌机b的移动
对应代码
void ufobmove()
{static int step = b.speed;if (b.bornflag == 1){b.bornflag = 0;b.x = rand() % (WIDTH - b.width);b.y = -b.height;}if (b.x <= 0 || b.x + b.width >= WIDTH){step = -step;}b.x += step;b.y++;if (b.y >= HEIGHT){b.bornflag = 1;}}
由视频可知敌机b的移动规律是在左右移动的同时还向前移动,step如果为正,向右移动,step如果为负,表示向左移动,如果b战机没有出现在窗口内(b.bornflag == 1),将b.bornflag 置0,表示要出现,随机数生成b战机的坐标.y=-b.height;初始化先隐藏起来.如果b战机到了左右边界,step=-step;
就向相反的方向移动了,左右移动实质是在给b.x±step;然后y++,b战机在左右移动的过程中,一直往前走.当b战机出了下边界,b.bornflag = 1;表示b战机出了窗口.
敌机c的移动
请看vcr
敌机c的移动
对应的代码为
void ufocmove()
{static float disx = 0, disy = 0;static float tmpx = 0, tmpy = 0;static float vx = 0, vy = 0;float step = 1000 / c.speed;if (1 == c.bornflag){c.bornflag = 0;tmpx = rand() % (WIDTH - c.width);tmpy = -c.height;disx = plane.x - tmpx;disy = plane.y - tmpy;vx = disx / step;vy = disy / step;}tmpx += vx;tmpy += vy;c.x = (int)(tmpx + 0.5);c.y = (int)(tmpy + 0.5);if (c.x < -c.width){c.bornflag = 1;}else if (c.x > WIDTH){c.bornflag = 1;}if (c.y > HEIGHT){c.bornflag = 1;}}这个c战机是要撞向我方飞机,tmpx,tmpy存放的是c战机的临时的位置,刚生成时,当然是他出生点的坐标,disx是c战机刚出来x方向上与当时我方战机x方向上的距离,同理另一个.step是,假如c.speed的速度为5的话,step==200,就是说将x方向上的距离分为200份,vx就是每一份的距离是多少像素,这里强制类型转化,c.x,c.y是整数,因为vx,vy不清楚,所以+0.5,四舍五入一下就是整数了.如果在左,右,下方向超出了,就c.bornflag = 1;离开窗口了.
6.整体代码展示
#include<stdio.h>
#include <graphics.h>
//#include<conio.h>//_getch();
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane, img_a, img_b, img_c, img_abullet, img_bbullet, img_cbullet, img_planebullet;
struct aircraft
{int x, y;int width;int height;int speed;int bornflag;};
aircraft plane, a, b, c;
void datainit()
{plane = { 150,150 };//a = { 0,0 };/*b = { 300,0 };*//*c = { 450,0 };*/a.speed = 1;a.bornflag = 1;b.bornflag = 1;c.bornflag = 1;a.width = 100;a.height = 100;b.speed = 1;b.width = 80;b.height = 100;c.height = 70;c.width = 70;c.speed = 3;}
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}
void load()
{loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");loadimage(&img_a, "./2.png");loadimage(&img_b, "./3.png");loadimage(&img_c, "./4.png");loadimage(&img_abullet, "./5.png");loadimage(&img_bbullet, "./6.png");loadimage(&img_cbullet, "./7.png");loadimage(&img_planebullet, "./8.png");}
void draw()
{putimage(0, 0, &img_bk);putimage(plane.x, plane.y ,&img_plane );putimage(a.x, a.y ,&img_a);putimage(b.x, b.y ,&img_b );putimage(c.x, c.y, &img_c );putimage(400, 0 ,&img_abullet );putimage(400, 50 ,&img_bbullet);putimage(400, 100 ,&img_cbullet );putimage(400, 150, &img_planebullet );}
void player_move(int speed) //处理飞机移动
{if (GetAsyncKeyState(VK_UP) || GetAsyncKeyState('W')){if (plane.y > 0)plane.y -= speed;}if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 51< HEIGHT)plane.y += speed;}if (GetAsyncKeyState(VK_LEFT) || GetAsyncKeyState('A')){if (plane.x > 0)plane.x -= speed;}if (GetAsyncKeyState(VK_RIGHT) || GetAsyncKeyState('D')){if (plane.x + 51 < WIDTH)plane.x += speed;}
}
void ufoamove()
{static int dir1 = 1;if (a.bornflag == 1){a.bornflag = 0;a.x = rand() % (WIDTH - a.width);a.y = -50;}if (a.y > 200){dir1 = 0;}else if (a.y < -150){dir1 = 1;a.bornflag = 1;}if (1 == dir1){a.y += a.speed;}else{a.y -= a.speed;}}
void ufobmove()
{static int step = b.speed;if (b.bornflag == 1){b.bornflag = 0;b.x = rand() % (WIDTH - b.width);b.y = -b.height;}if (b.x <= 0 || b.x + b.width >= WIDTH){step = -step;}b.x += step;b.y++;if (b.y >= HEIGHT){b.bornflag = 1;}}
void ufocmove()
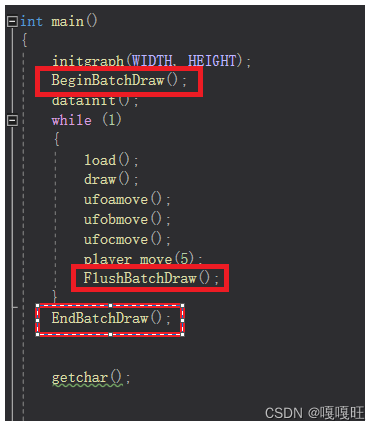
{static float disx = 0, disy = 0;static float tmpx = 0, tmpy = 0;static float vx = 0, vy = 0;float step = 1000 / c.speed;if (1 == c.bornflag){c.bornflag = 0;tmpx = rand() % (WIDTH - c.width);tmpy = -c.height;disx = plane.x - tmpx;disy = plane.y - tmpy;vx = disx / step;vy = disy / step;}tmpx += vx;tmpy += vy;c.x = (int)(tmpx + 0.5);c.y = (int)(tmpy + 0.5);if (c.x < -c.width){c.bornflag = 1;}else if (c.x > WIDTH){c.bornflag = 1;}if (c.y > HEIGHT){c.bornflag = 1;}}int main()
{initgraph(WIDTH, HEIGHT);BeginBatchDraw();datainit();while (1){load();draw();ufoamove();ufobmove();ufocmove();player_move(5);FlushBatchDraw();}EndBatchDraw();getchar();}