恒定导通时间控制模式
基于纹波的恒定导通时间控制模式(Ripple-Based Constant On-Time, RB-COT)
电压模控制与电流模控制反馈电压  都要经过误差放大器后再和参考电压进行比较,这就使得电压的变化要通过一个补偿网络才能够作用到功率管上,这也就降低了环路对于输出电压变化的响应速度。
都要经过误差放大器后再和参考电压进行比较,这就使得电压的变化要通过一个补偿网络才能够作用到功率管上,这也就降低了环路对于输出电压变化的响应速度。
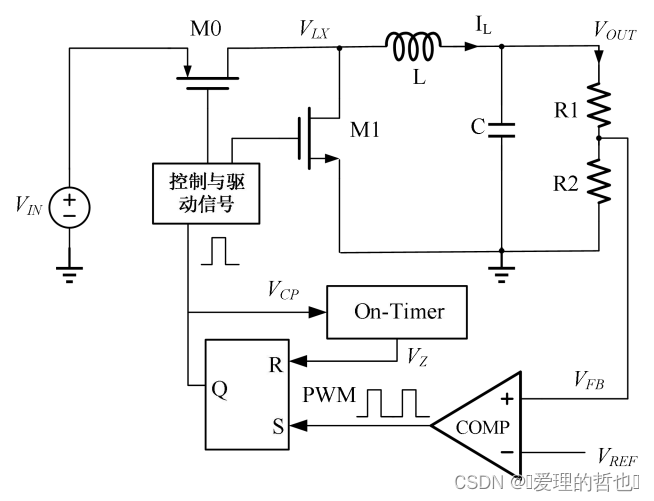
工作原理:
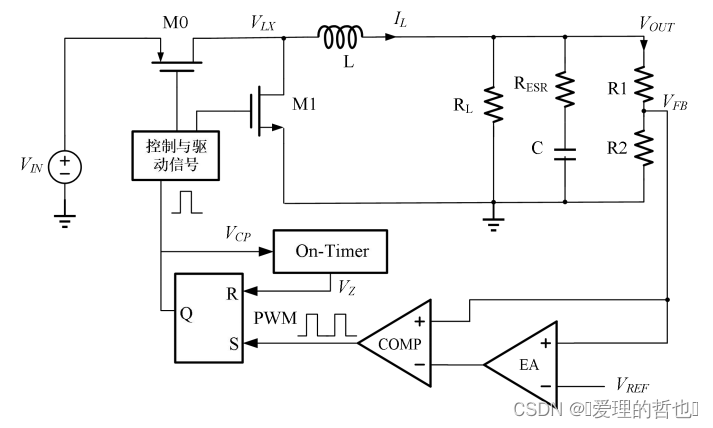
当 小于  时,PWM 比较器输出翻转使 RS 触发器置位,通过驱动与控制逻辑调整,使高端管打开,低端管关断,进入充电阶段,使输出电压纹波上升,反馈电压上升大于参考电压 ,通过 RS 触发器使开关控制信号维持高电平。
时,PWM 比较器输出翻转使 RS 触发器置位,通过驱动与控制逻辑调整,使高端管打开,低端管关断,进入充电阶段,使输出电压纹波上升,反馈电压上升大于参考电压 ,通过 RS 触发器使开关控制信号维持高电平。
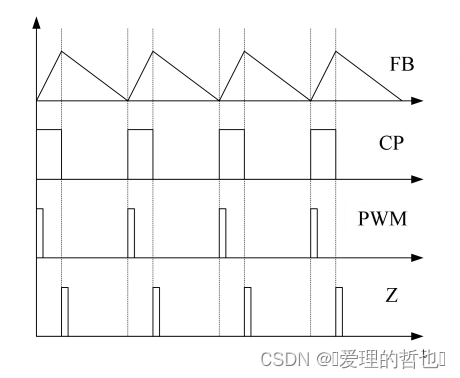
同时开关控制信号 CP 控制 On-Timer 固定导通时间生成模块开始计时,经过固定导通时间  后,固定导通时间生成模块输出一个高电平窄脉冲,使RS 触发器复位,从而使得高端管关断,低端管打开,进入续流阶段,直到下一次检测到反馈电压 小于参考电压 时重复上述过程,使输出电压最终维持稳定状态。恒定导通时间控制模式的典型波形图如下图所示:
后,固定导通时间生成模块输出一个高电平窄脉冲,使RS 触发器复位,从而使得高端管关断,低端管打开,进入续流阶段,直到下一次检测到反馈电压 小于参考电压 时重复上述过程,使输出电压最终维持稳定状态。恒定导通时间控制模式的典型波形图如下图所示:
RBCOT 控制模式具有更快的响应速度,这也就使得其对输出电容的大小要求更低,可以节约芯片面积,减小成本。RBCOT 结构在轻载下可以自动降频,提高了芯片的整体效率。与电压模控制和电流模控制相比去掉了误差放大器结构也简化了设计。
但该结构存在直流失调问题,降低了输出电压的精度。 一般的 COT 结构工作频率变化范围很大,有很严重的 EMI 问题,可以通过ACOT 控制对导通时间进行调节,使工作频率稳定在一定范围内。由于RBCOT 为基于纹波的控制模式,较小的纹波也导致该结构 抗噪声能力更弱。
V^2COT 控制模式
在 RBCOT 的基础上,V^2COT 控制模式被提出。传统的电流模控制是在电压模控制的电压回路基础上添加了一条电流回路,组成了电压环与电流环的双环控制。V^2COT 控制模式就是在 RBCOT 内环电压控制的基础上添加了外环电压反馈,形成双电压反馈电路。下图为 V^2COT 控制模式的拓扑结构图。 不仅输入到 PWM 比较器中,还输入到了误差放大器中,
与误差放大器输出进行比较,输出开关控制信号。其工作逻辑与 RBCOT 相同,其为包含RBCOT 内环与 EA 放大外环的双环控制结构。
内环为RBCOT 结构,这一结构保证了整体系统仍然具有不低于 RBCOT结构的瞬态响应速度,当负载发生变化或输入信号发生变化时,系统仍可以通过 RBCOT 内环进行快速响应对功率管的开关进行控制。外环包含 EA 误差放大器与补偿网络,其响应速度较慢,外环的作用是提高环路的增益,消除RBCOT 结构中存在的直流失调,从而提高输出电压的精度。
与谷值电流模式相比,在负载进行跳变时,输出电压的变化可以直接改变开关控制信号的占空比,从而获得更高的瞬态响应速度。但该结构先输出电容所产生的纹波与电感电流的纹波存在相移,可能导致整体环路出现次谐波振荡。
V^2COT 模式的瞬态响应速度不低于 RBCOT 模式,同时其输出精度更高。但 V^2COT 的设计更加复杂,其不仅需要考虑到整体环路的稳定条件,还需要考虑到误差放大器的补偿网络,同时需要实现斜坡补偿与频率补偿。