launch文件内:node标签内的<param>标签示例:

可以看到launch文件内的<param>标签在命令行内会转化为--ros-args -p 这样格式的命令,说明<param>标签指定的是ros2内的参数。不能用于传递非ros2的传入参数
如果要传入非ros2的参数需要使用<node>标签内的args属性


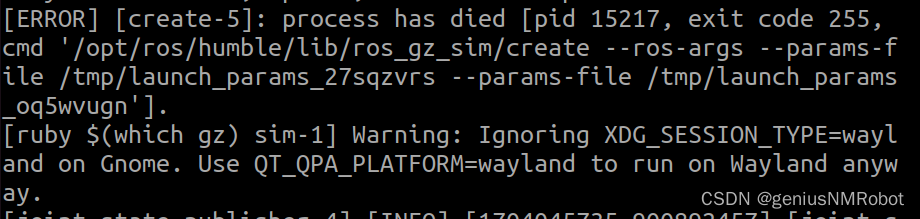
这个及说明命令成功了
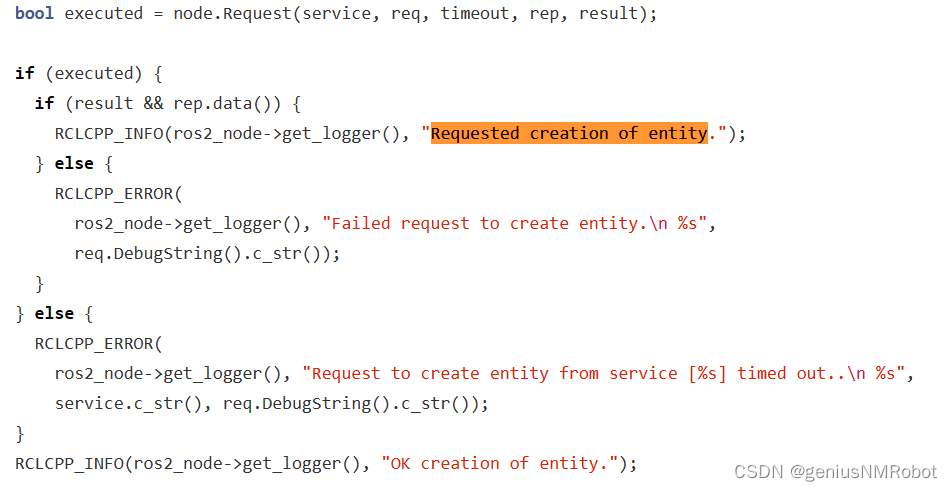
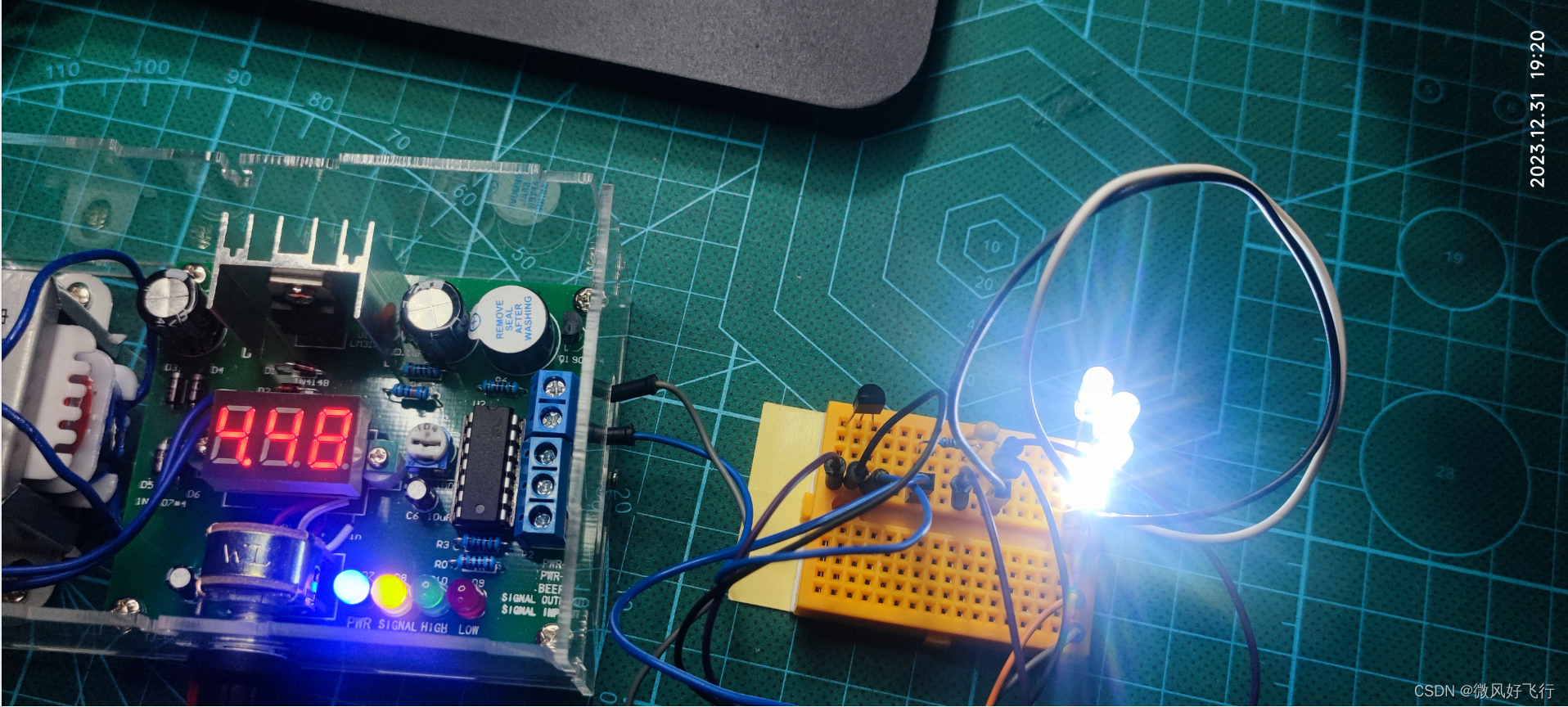
至少看上去比另外2个选项好得多,虽然我任然没有看到模型
初步估计:我下错了版本,我应该下载humble版本的ros_gz,但是我好像下载了ros1版本可能
launch文件内:node标签内的<param>标签示例:
这个及说明命令成功了
至少看上去比另外2个选项好得多,虽然我任然没有看到模型
初步估计:我下错了版本,我应该下载humble版本的ros_gz,但是我好像下载了ros1版本可能
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/312252.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!