
今年努力了一波,几个月周六日无休,自己在嵌入式linux工作有些年头,结合自己也是一直和SLAM工程师对接,所以输出了一波面向SLAM算法工程师Linux课程,当然嵌入式入门的同学也可以学习。下面是合作的官方前面发的宣传文章,今天我也分享一下:
对于研究SLAM、自动驾驶、工业3D视觉的小伙伴来说,Linux开发现在已经越来越重要。尤其是对于低成本的家用扫地机、割草机等产品,Linux是主流的开发系统。


笔者在SLAM领域从业了多年,发现市面上针对三维视觉在Linux下的开发资料较少,尤其是对于内存泄露如何排查、机器死机情况如何分析、PC与开发板如何交叉编译、程序内存如何管理等方面。偶尔百度上也能查找到一些资料,但是较为零散,甚至有些还是错误的。
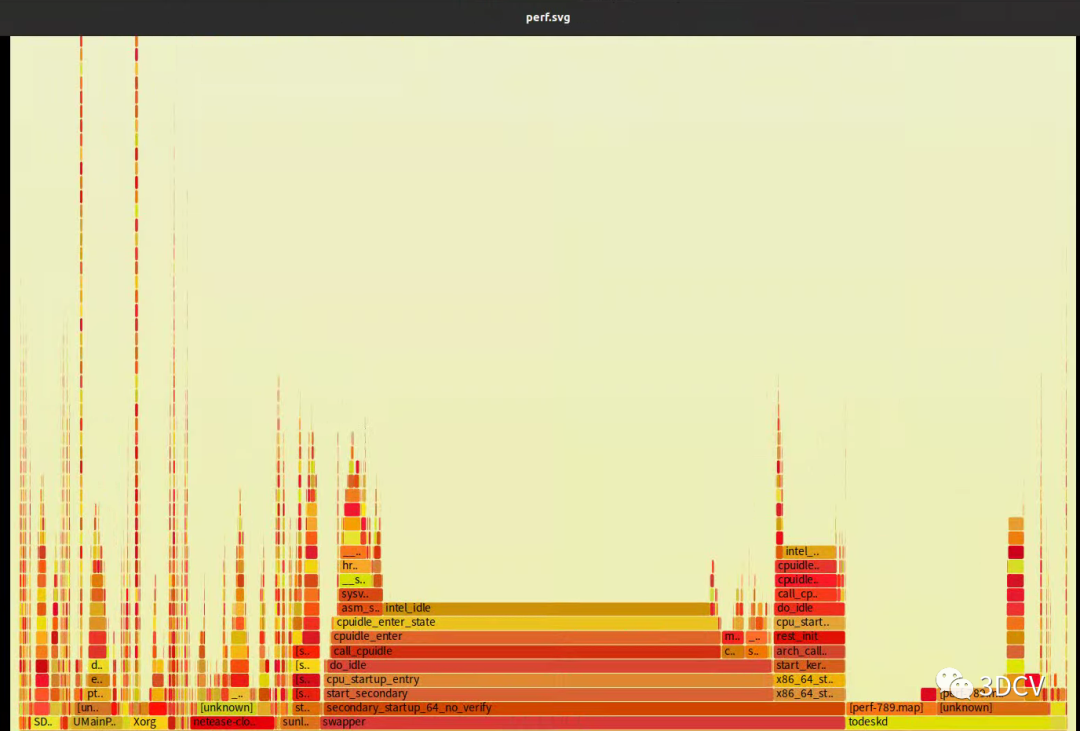
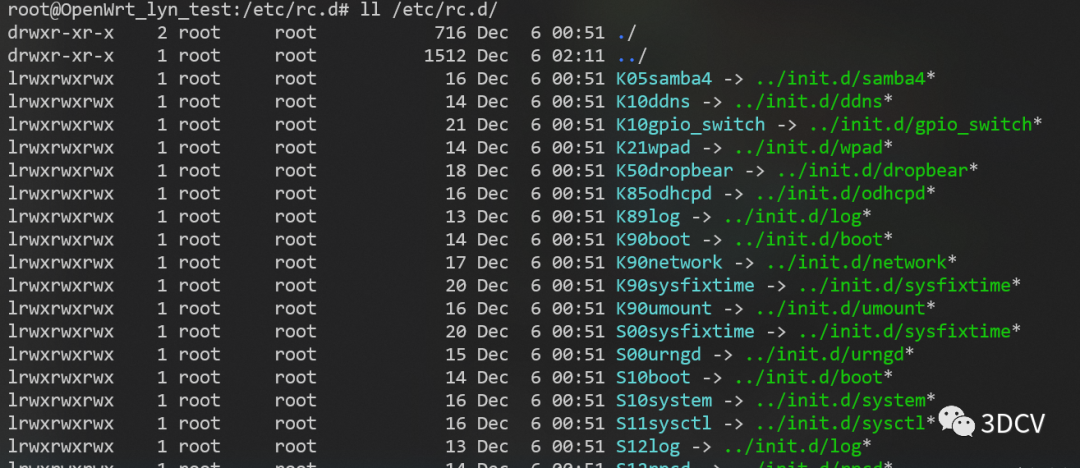
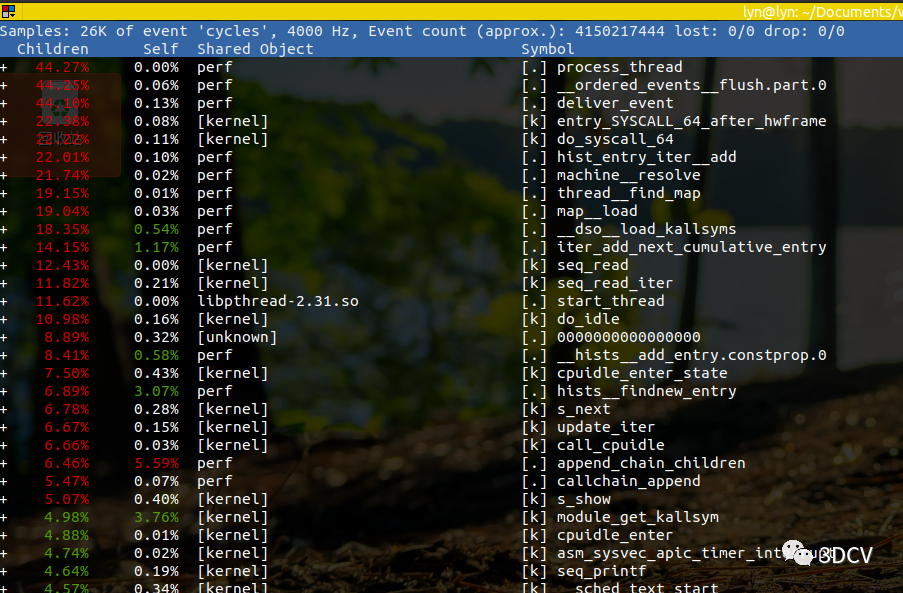
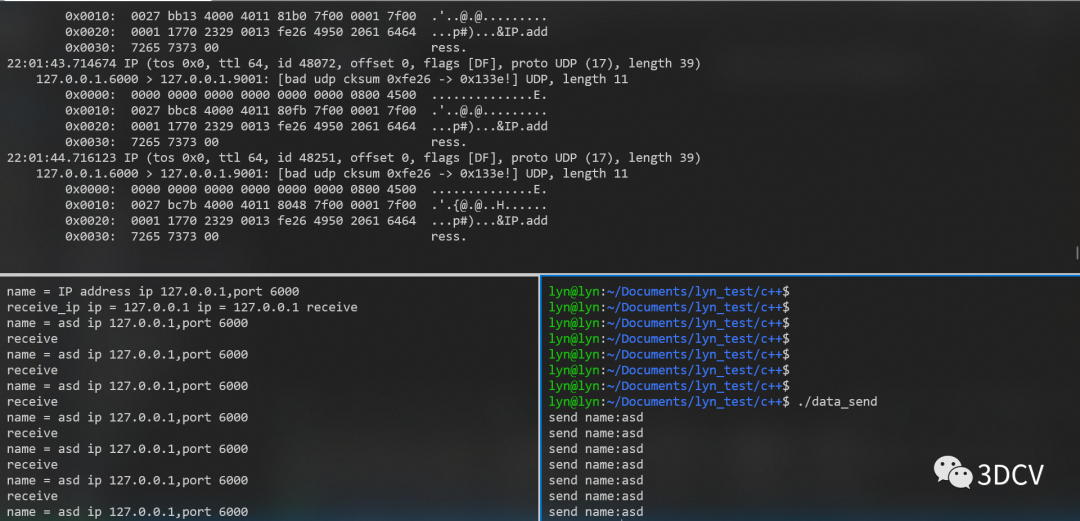
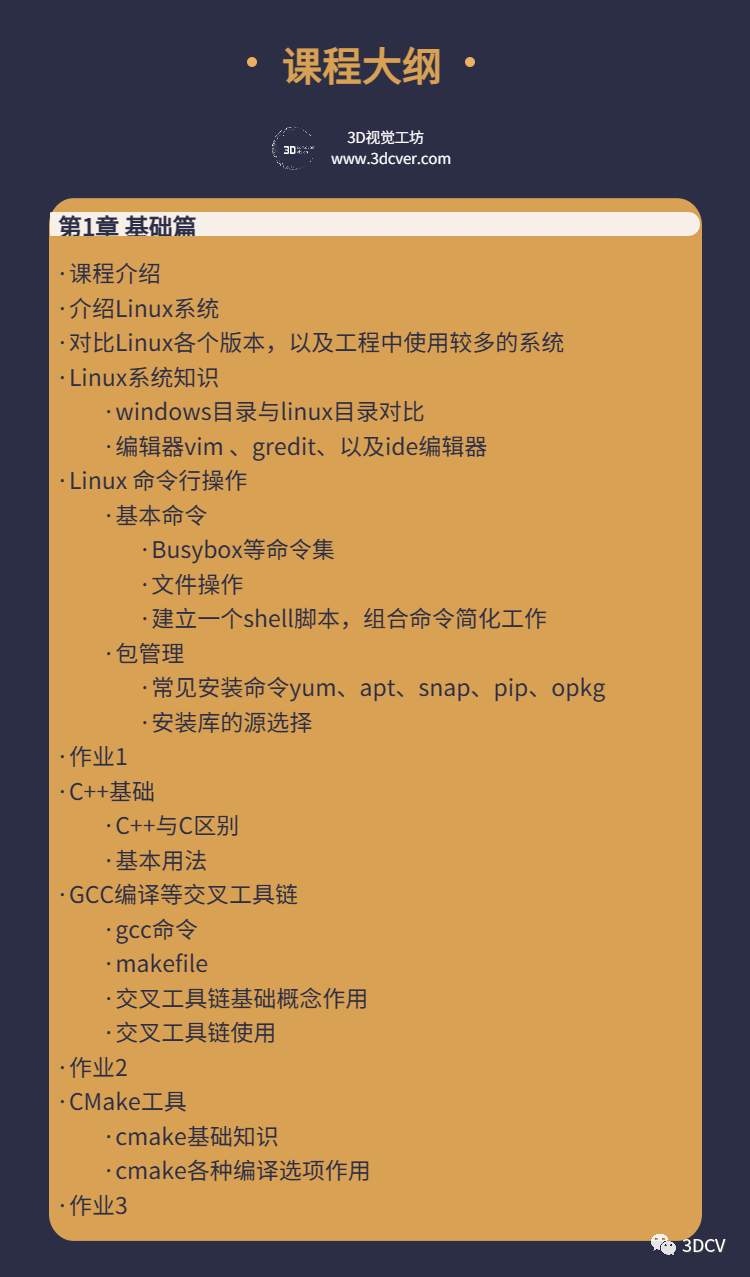
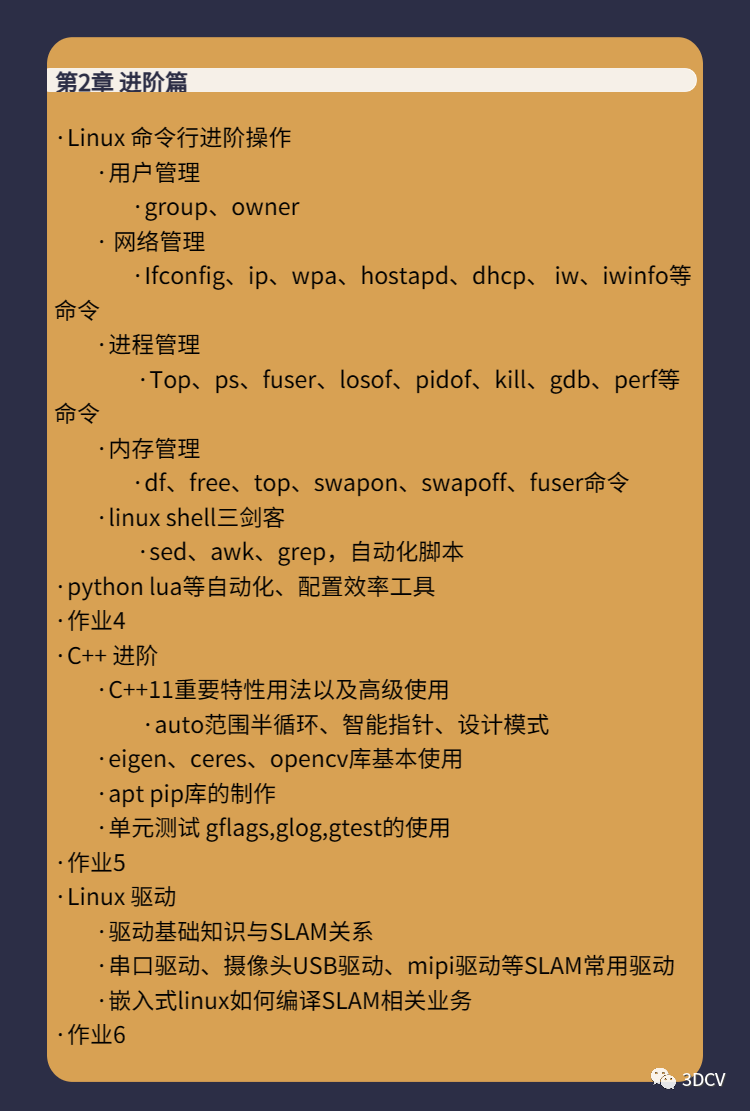
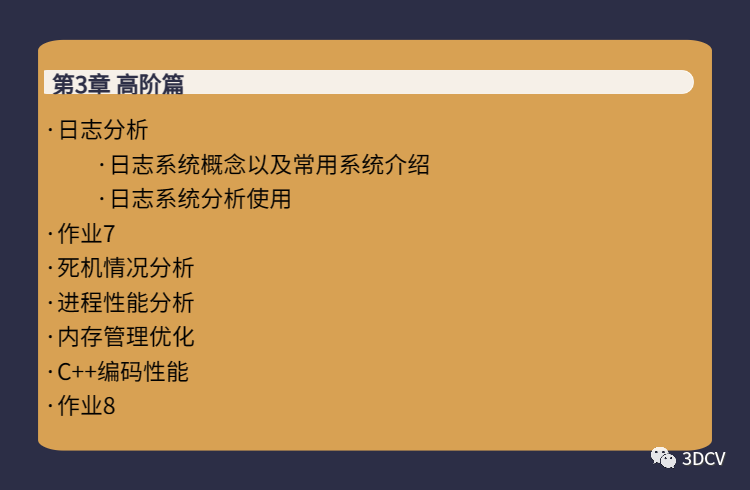
因而,3D视觉工坊课程「面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]」,课程在基础篇会讲解Linux嵌入式编程中的基础知识点,让大家迅速快速了解linux的常见玩法;在进阶篇,会重点讲解Linux下的高级玩法,包括GDB调试、perf、shell命令以及Linux驱动等;在高阶篇,对于死机情况分析,进程性能分析、内存管理分析等,这些都是产品落地时的硬核技能。贯穿整个课程的,还有大量的实战练习,是老师精心设计的,希望每一个学员能够自主认真完成,以达到技能的真正提升。

课程答疑
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。







![概率的 50 个具有挑战性的问题 [8/50]:完美的桥牌](https://img-blog.csdnimg.cn/img_convert/d0a56f0538097198ff4d337ef1d134bc.png)