参考:
- 【深度学习】【三维重建】windows11环境配置tiny-cuda-nn详细教程
- nerfstudio介绍及在windows上的配置、使用
- NeRFStudio官网github
- RuntimeError: PytorchStreamReader failed reading zip archive: failed finding central directory原因及解决
目录
- requirements
- 一、创建环境
- 二、安装依赖
- 1.安装pytorch
- 2.安装tiny-cuda-nn
- 3.安装nerfstudio
- 三、训练模型
- 四、加载预训练模型
- 五、导出结果
- 1.渲染视频
- 2.生成点云
- 3.生成网格
- 4.对比一下
requirements
cuda 11.8(11.5以上)
conda
python 3.8 (>=3.8 )
cmake
visual studio 2019/2022
一、创建环境
anaconda prompt中创建conda环境:
conda create --name nerfstudio -y python=3.8
conda activate nerfstudio
pip install --upgrade pip
二、安装依赖
1.安装pytorch
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
2.安装tiny-cuda-nn
按照官方文档上的方法执行会报错,找了一个教程安装:https://blog.csdn.net/yangyu0515/article/details/131959907#comments_29299437 照着这个教程的【直接下载(推荐)】那里开始安装就可以了。
3.安装nerfstudio
简单的选择:
pip install nerfstudio
或者,如果您想要最新和最好的:
git clone https://github.com/nerfstudio-project/nerfstudio.git
cd nerfstudio
pip install --upgrade pip setuptools
pip install -e .
三、训练模型
-
下载kitchen测试集,解压缩,并将其拷贝到nerfstudio的data/nerfstudio目录下,data/nerfstudio需自己创建;https://drive.google.com/drive/folders/19TV6kdVGcmg3cGZ1bNIUnBBMD-iQjRbG
官网也提供了下载模型的方法:# Download some test data: ns-download-data nerfstudio --capture-name=poster # Train model ns-train nerfacto --data data/nerfstudio/poster# Train model ns-train nerfacto --data data/nerfstudio/poster` -
kitchen目录下已有transforms.json,若是自己拍摄的图像序列如lego,则执行如下命令生成transforms.json:
ns-process-data images --data data/nerfstudio/lego/train --output-dir data/nerfstudio/lego --camera-type perspective --matching-method exhaustive --sfm-tool colmap --crop-factor 0.0 0.0 0.0 0.0
- 执行如下命令进行训练:迭代产生的checkpoint存储在outputs/kitchen/nerfacto目录下
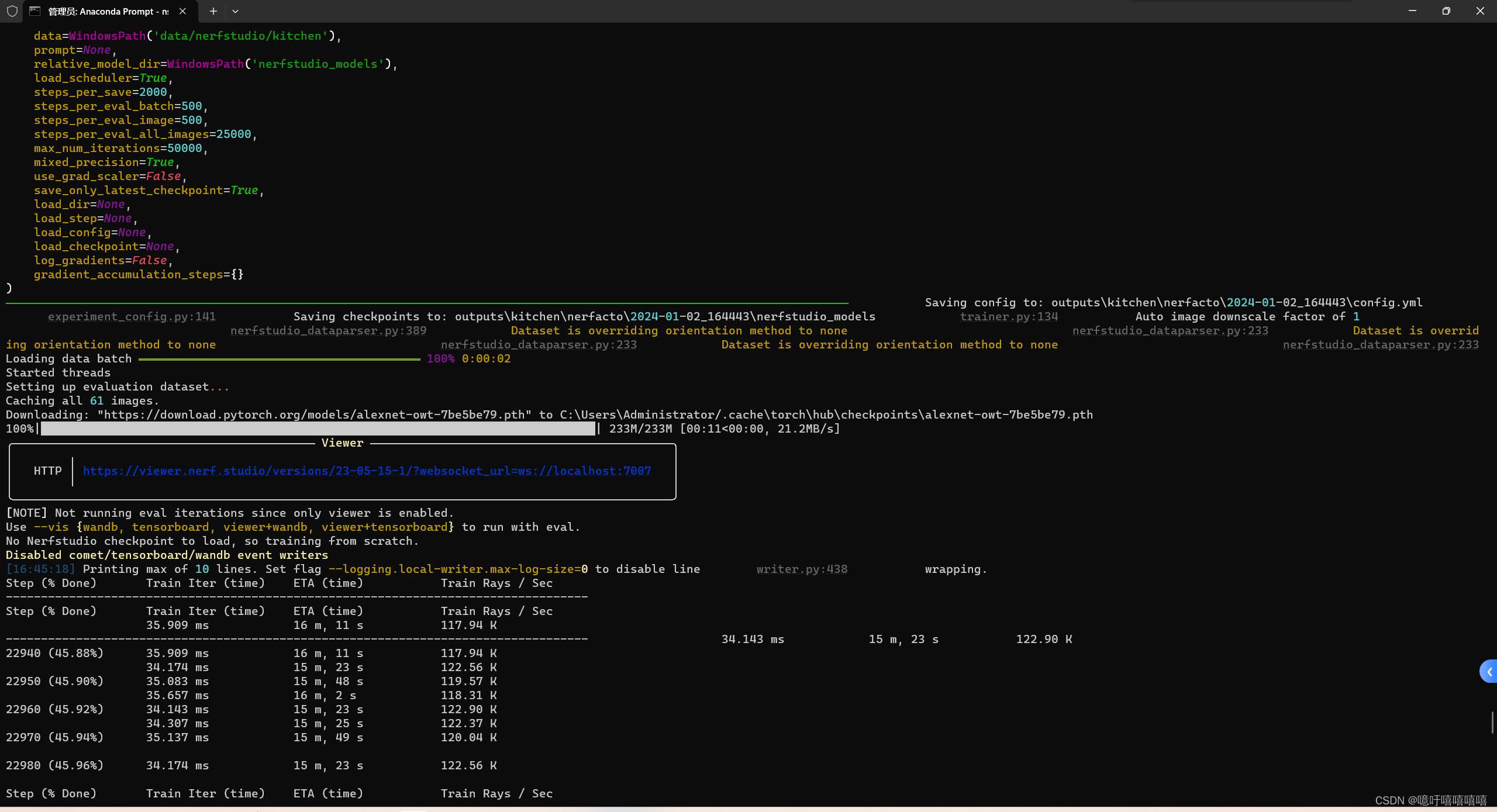
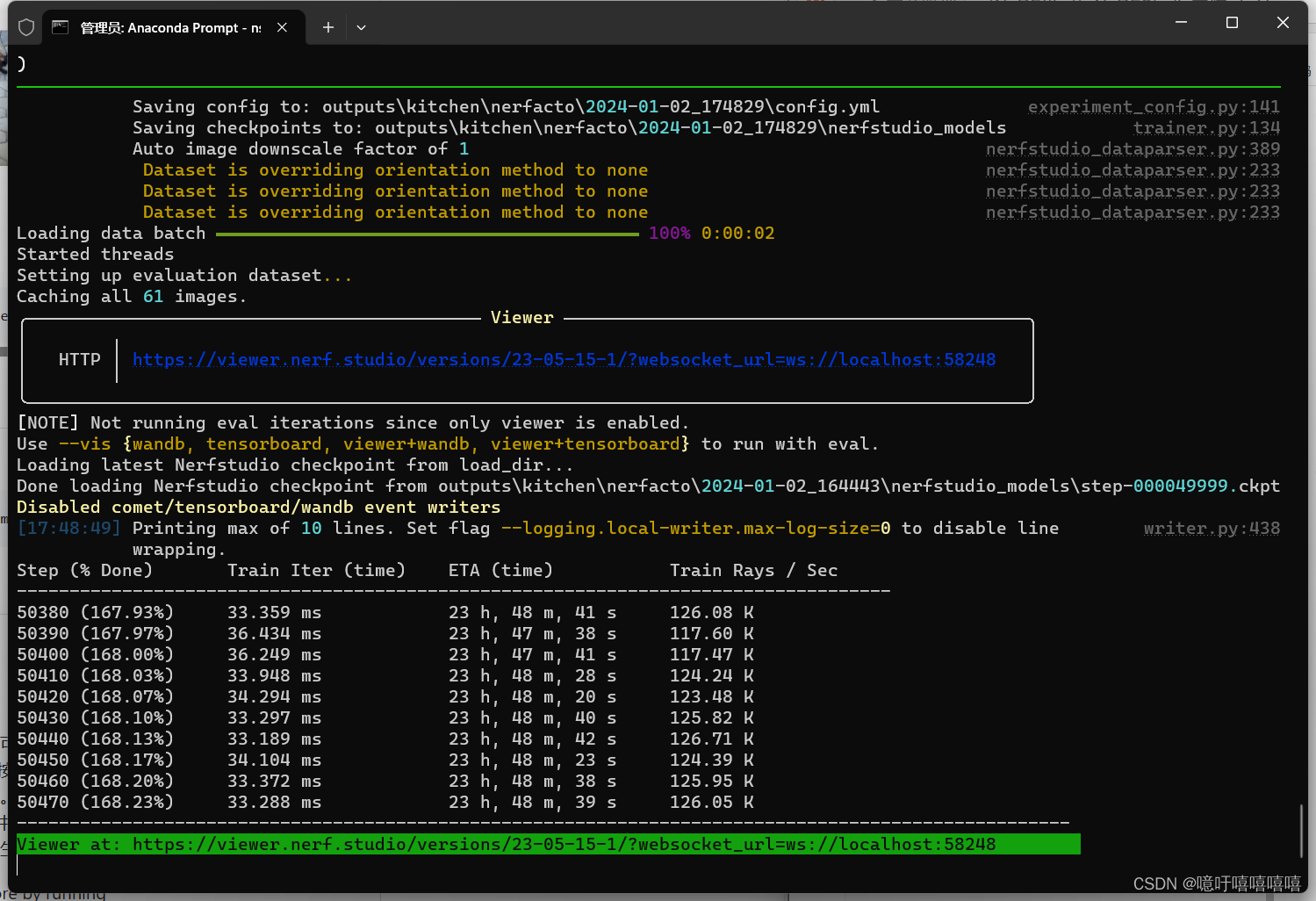
ns-train nerfacto --data data/nerfstudio/kitchen --vis viewer --max-num-iterations 50000
在第一次执行训练命令的时候我报错了:PytorchStreamReader failed reading zip archive: failed finding central ,解决方法如下:我估计是因为之前网络不好啥的导致下载的权重文件有点问题,所以找到 C:\Users\Administrator.cache\torch\hub\checkpoints\alexnet-owt-7be5be79.pth 将其删除。重新执行后问题解决。
训练进度如下图所示:
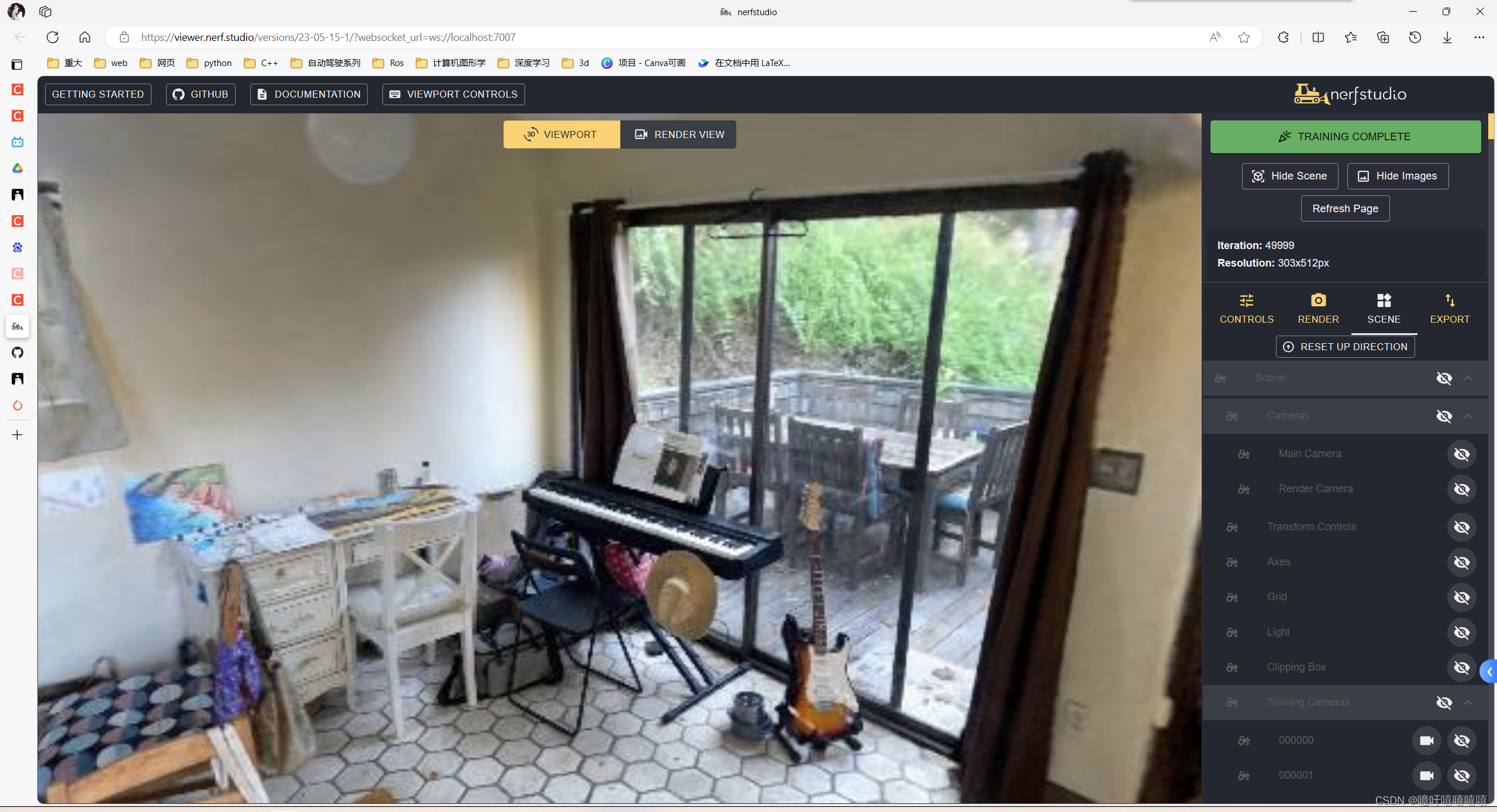
可视化效果:
四、加载预训练模型
可以加载预训练模型,如下命令所示:这将自动开始继续训练 :
ns-train nerfacto --data data/nerfstudio/kitchen --load-dir outputs/kitchen/nerfacto/2024-01-02_164443/nerfstudio_models
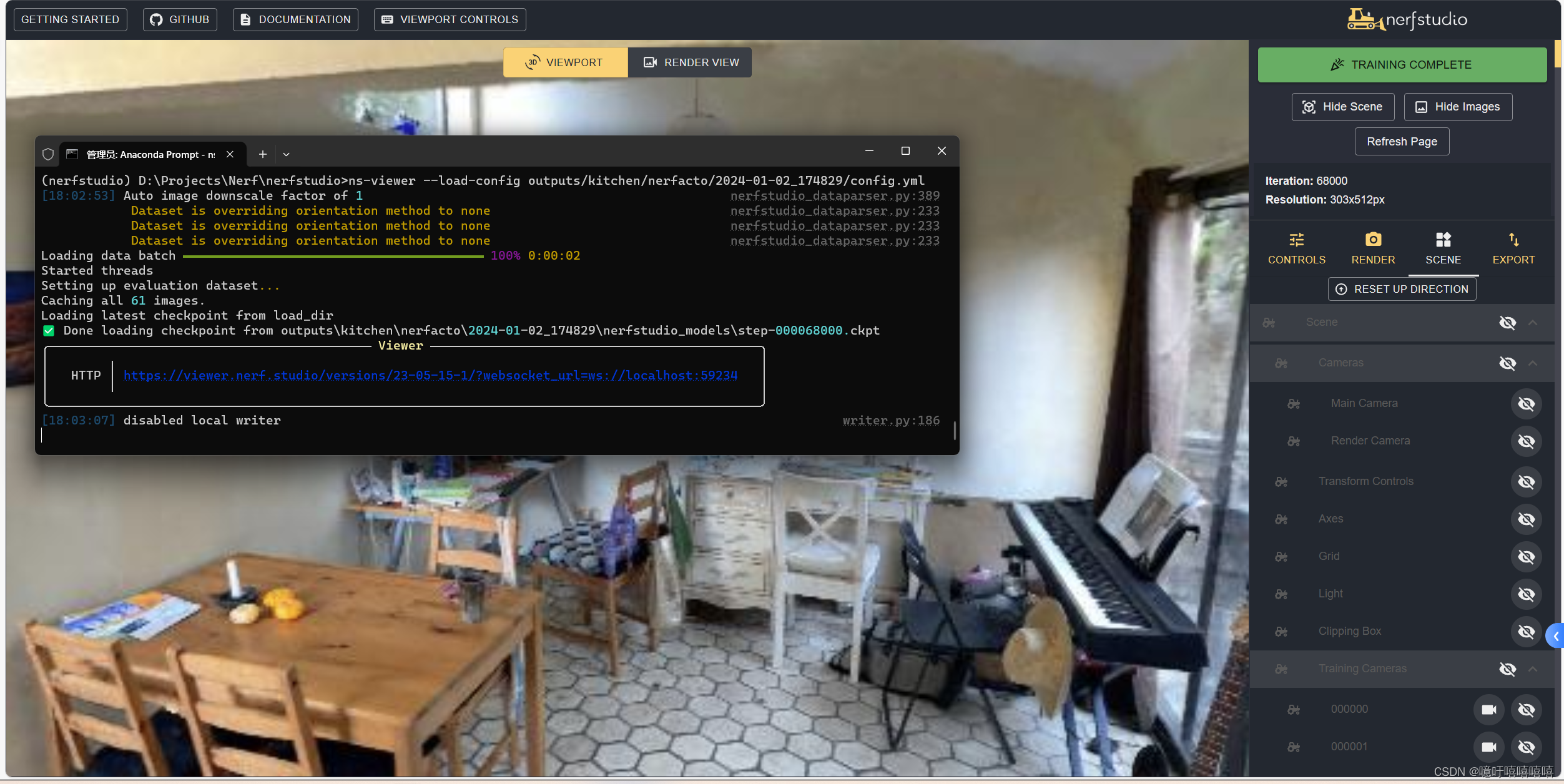
可以加载预训练模型进行可视化查看:
ns-viewer --load-config outputs/kitchen/nerfacto/2024-01-02_174829/config.yml
每个命令都有很多参数,可以通过–help查看具体支持哪些参数及参数的用处,如:
ns-render --help
ns-train --help
ns-train nerfacto --help
五、导出结果
获得 NeRF 模型后,您可以渲染视频或导出点云。
1.渲染视频
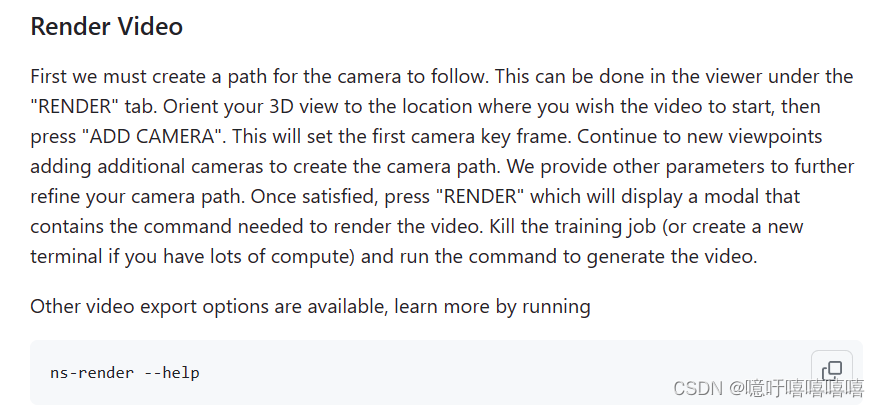
导出方法如图:
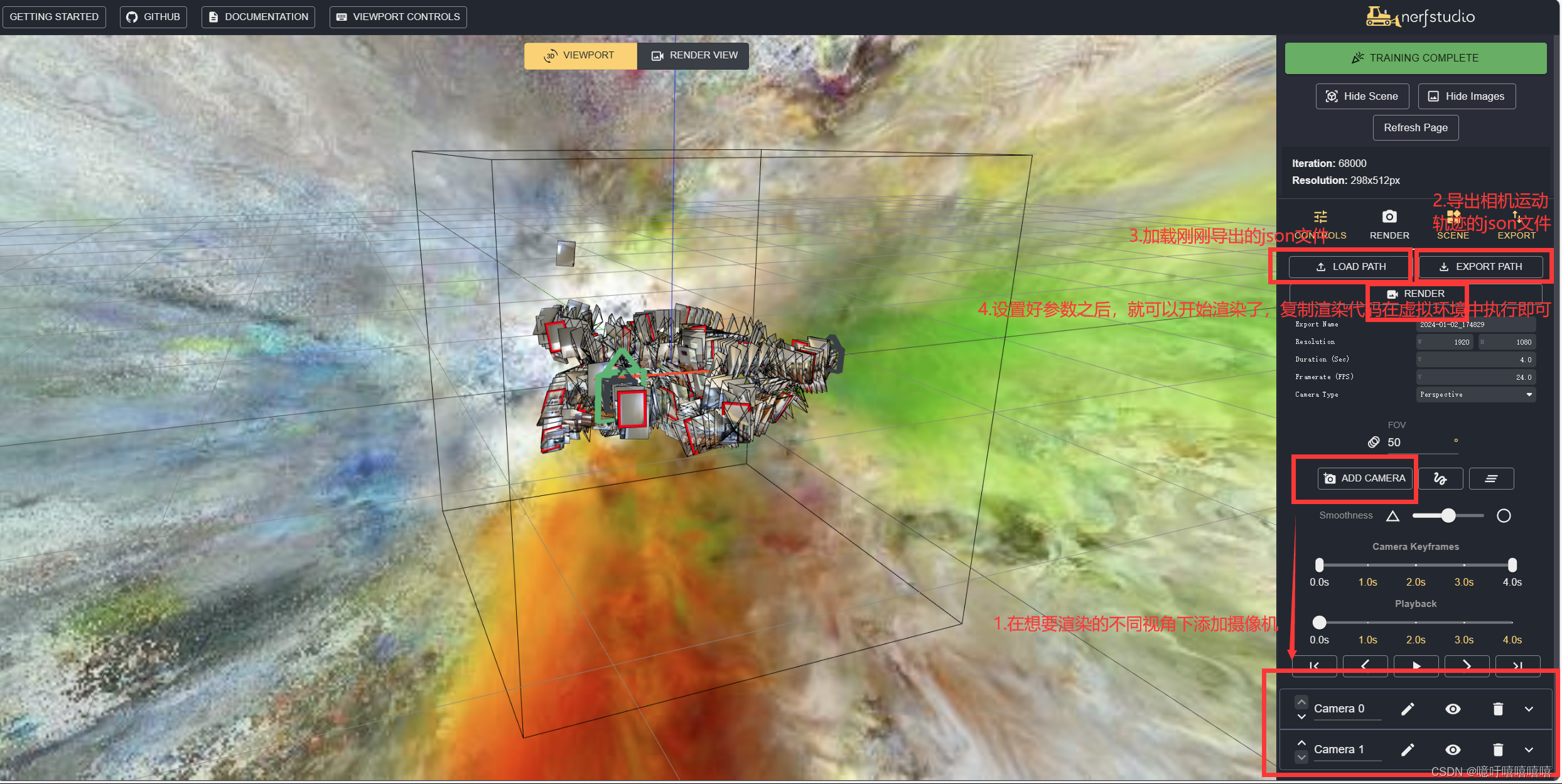
执行代码:
ns-render camera-path --load-config outputs\kitchen\nerfacto\2024-01-02_174829/config.yml --camera-path-filename data\nerfstudio\kitchen/camera_paths/2024-01-02_174829.json --output-path renders/data\nerfstudio\kitchen/2024-01-02_174829.mp4

渲染视频:
nerfstudio渲染视2024-01-02_174829
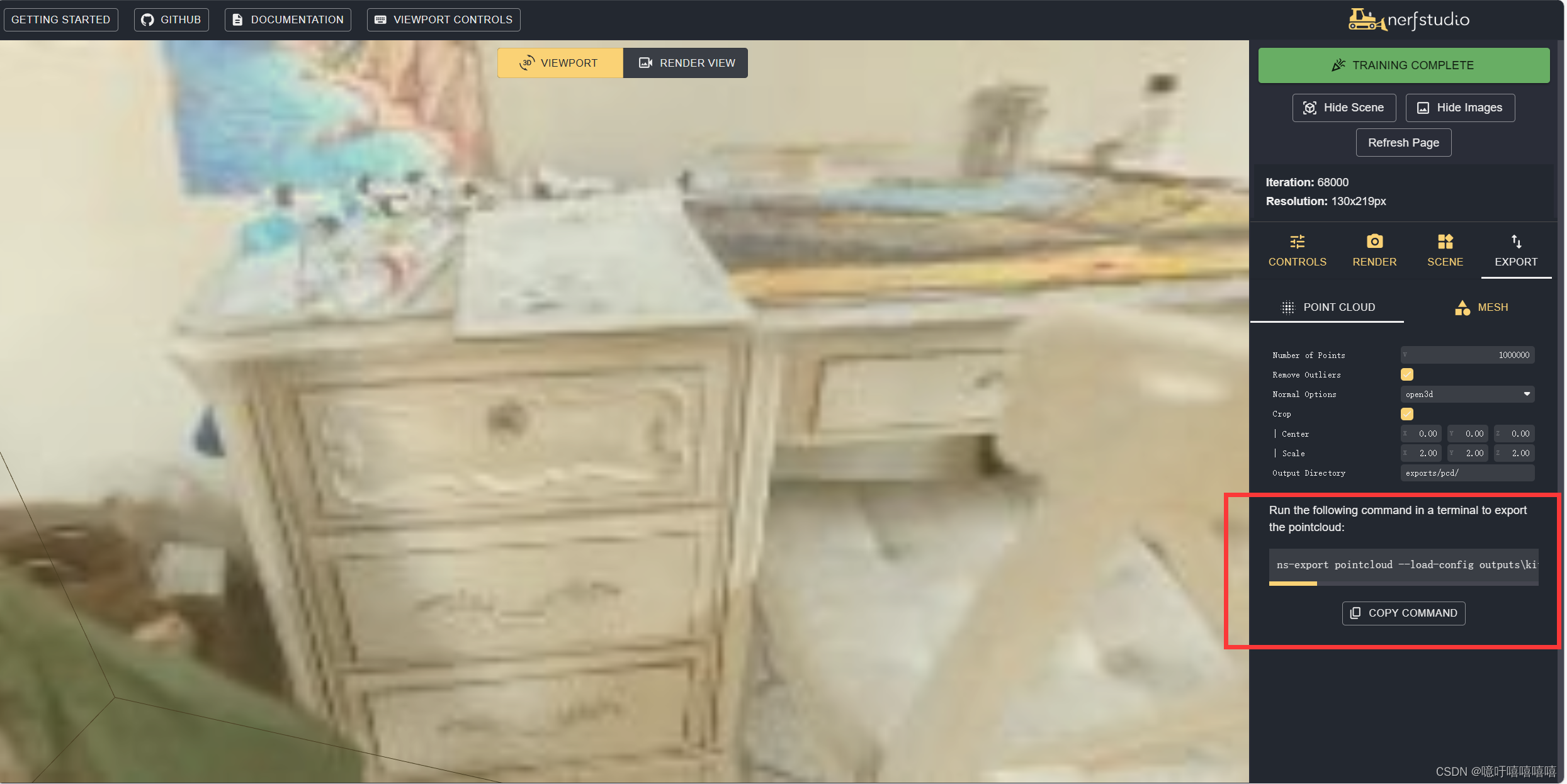
2.生成点云

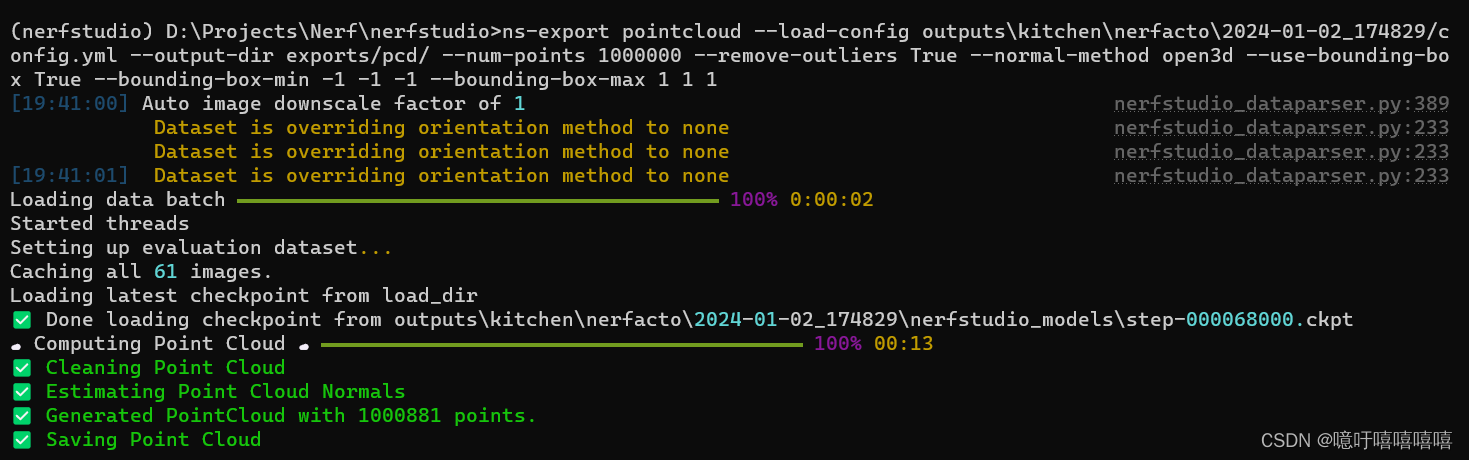
在可视化web上面我们可以选择导出点云的配置,并复制command进行导出:
ns-export pointcloud --load-config outputs\kitchen\nerfacto\2024-01-02_174829/config.yml --output-dir exports/pcd/ --num-points 1000000 --remove-outliers True --normal-method open3d --use-bounding-box True --bounding-box-min -1 -1 -1 --bounding-box-max 1 1 1
3.生成网格
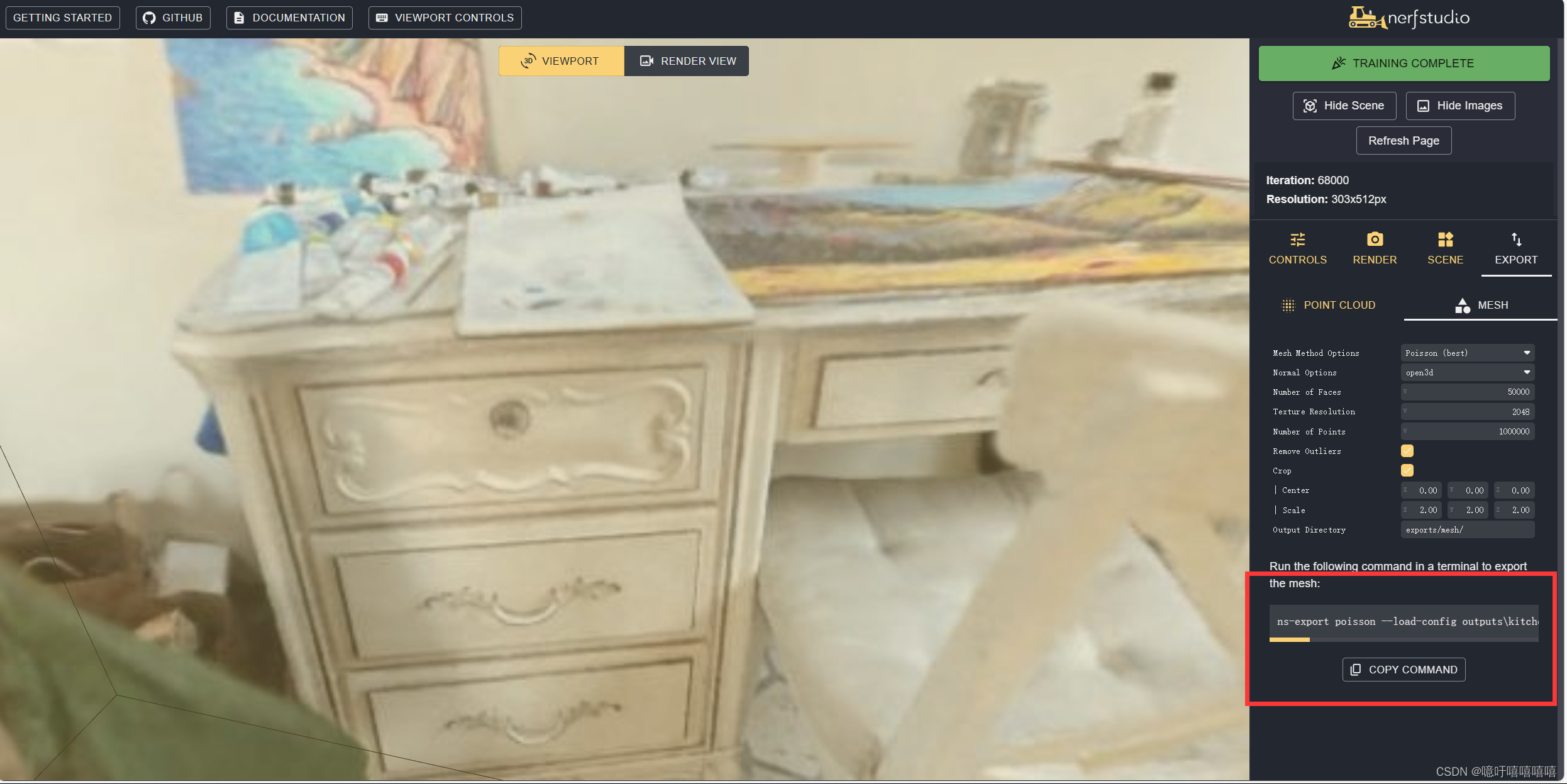
在可视化web上面我们可以选择导出网格的配置,并复制command进行导出:
ns-export poisson --load-config outputs\kitchen\nerfacto\2024-01-02_174829/config.yml --output-dir exports/mesh/ --target-num-faces 50000 --num-pixels-per-side 2048 --normal-method open3d --num-points 1000000 --remove-outliers True --use-bounding-box True --bounding-box-min -1 -1 -1 --bounding-box-max 1 1 1
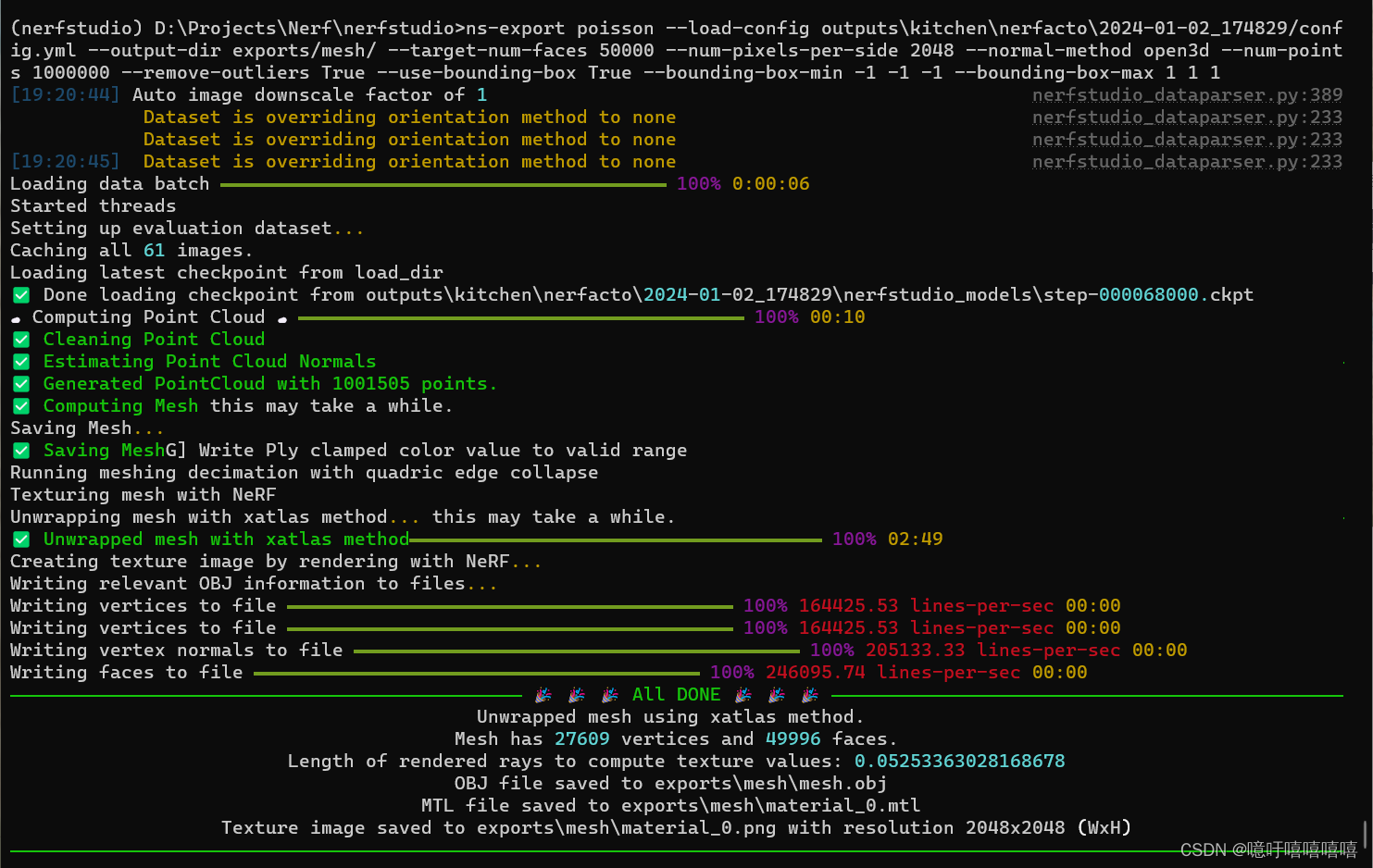
导出后在exports\mesh中有四个文件:
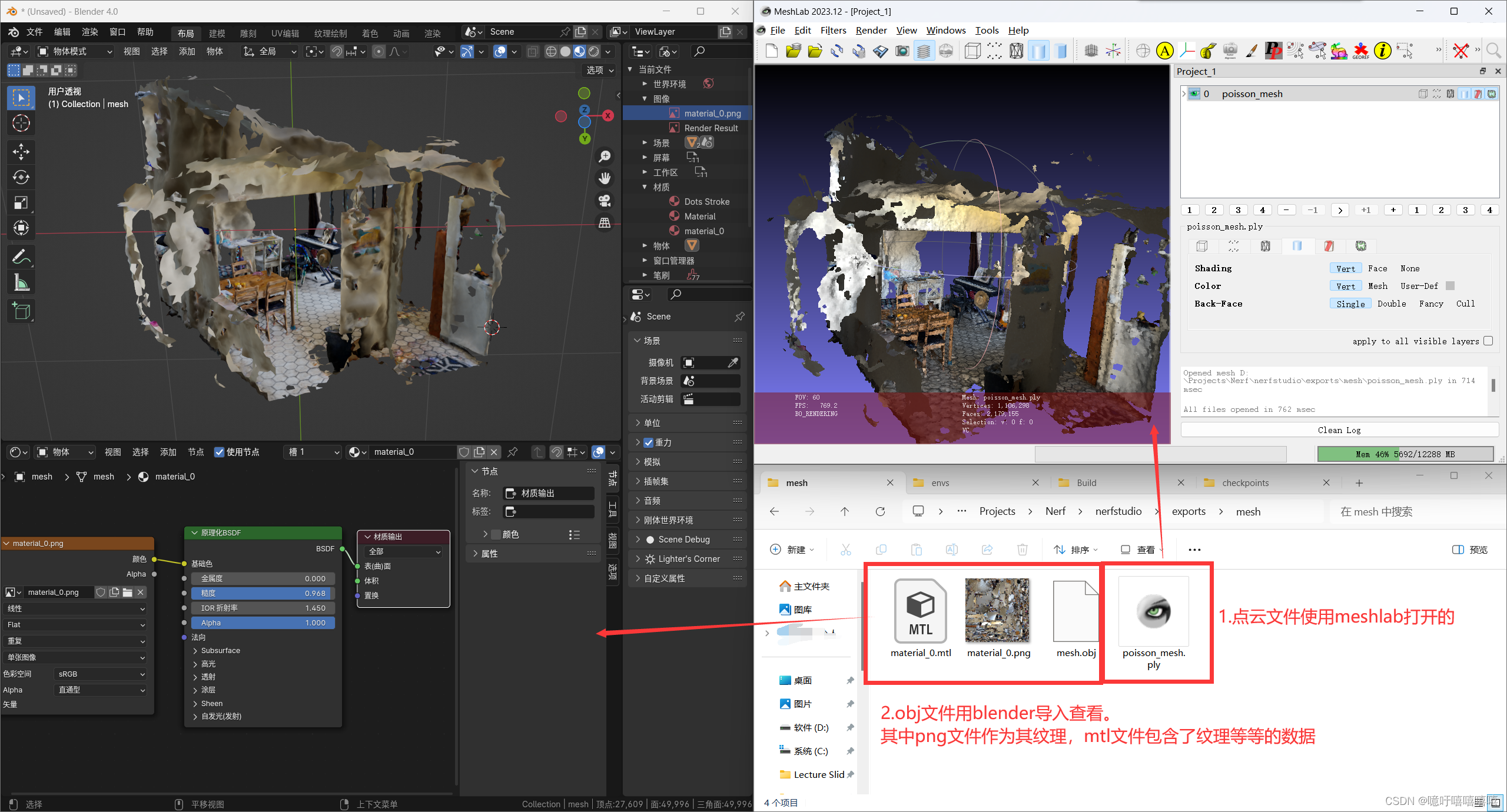
MTL文件是一种包含材质定义的文件格式,通常用于与3D模型文件一起使用。MTL是英文Material Library的缩写,它存储了模型的材质信息,包括颜色、纹理、光照等属性。
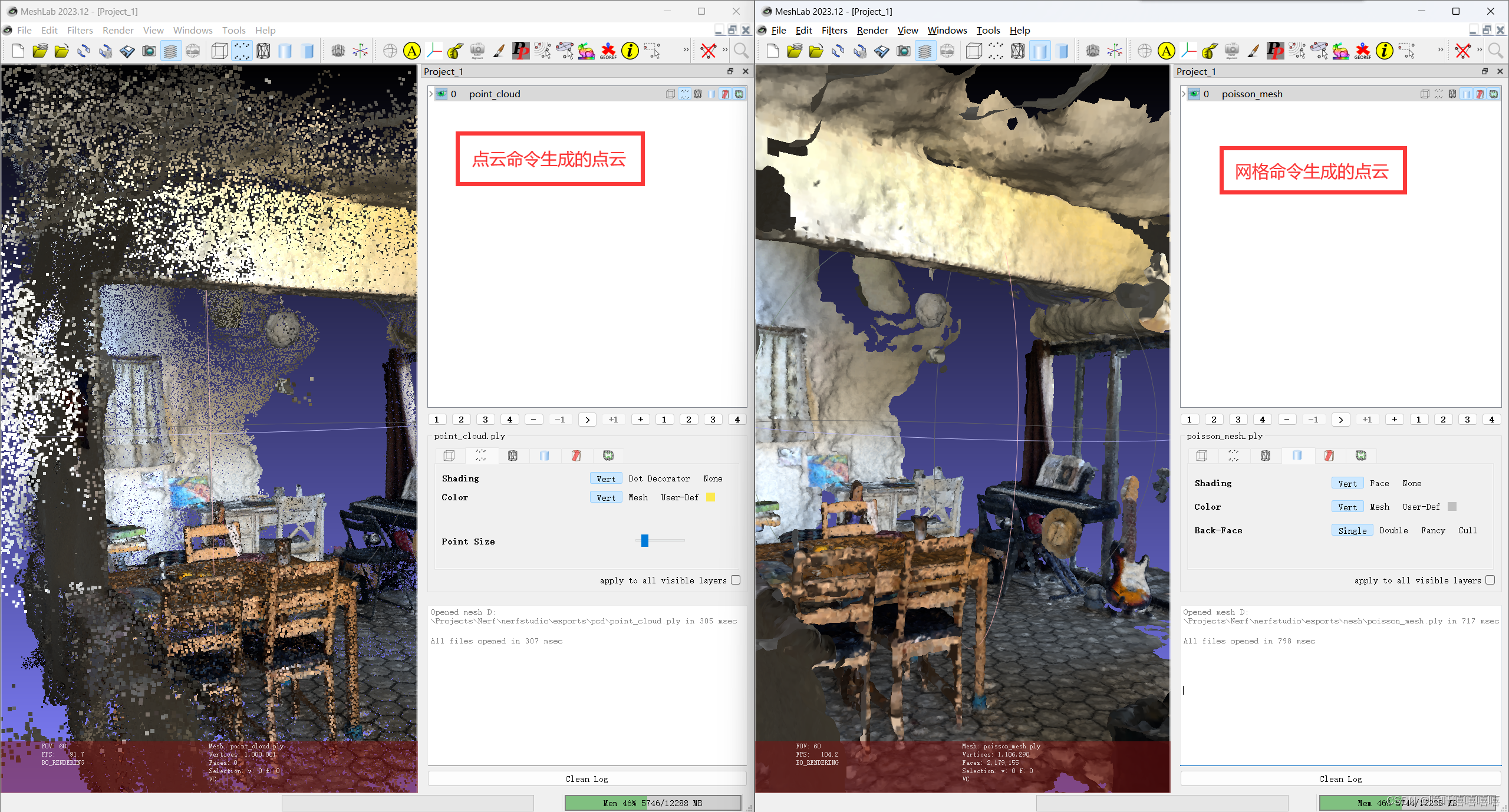
4.对比一下
对比一下ply和mesh里点云的区别:可以看到ply里面是没有面数据的……