1 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 Yolov安全帽佩戴检测 危险区域进入检测
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
建筑工人头部伤害是造成建筑伤亡事故的重要原因。佩戴安全帽是防止建筑工人发生脑部外伤事故的有效措施,而在实际工作中工人未佩戴安全帽的不安全行为时有发生。因此,对施工现场建筑工人佩戴安全帽自动实时检测进行探究,将为深入认知和主动预防安全事故提供新的视角。然而,传统的施工现场具有安全管理水平低下、管理范围小、主要依靠安全管理人员的主观监测并且时效性差、不能全程监控等一系列问题。
本项目基于yolov5实现了安全帽和危险区域检测。
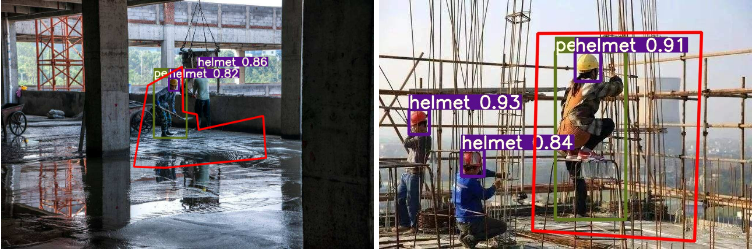
2 效果演示


3 Yolov5框架
我们选择当下YOLO最新的卷积神经网络YOLOv5来进行火焰识别检测。6月9日,Ultralytics公司开源了YOLOv5,离上一次YOLOv4发布不到50天。而且这一次的YOLOv5是完全基于PyTorch实现的!在我们还对YOLOv4的各种高端操作、丰富的实验对比惊叹不已时,YOLOv5又带来了更强实时目标检测技术。按照官方给出的数目,现版本的YOLOv5每个图像的推理时间最快0.007秒,即每秒140帧(FPS),但YOLOv5的权重文件大小只有YOLOv4的1/9。
目标检测架构分为两种,一种是two-stage,一种是one-stage,区别就在于 two-stage 有region
proposal过程,类似于一种海选过程,网络会根据候选区域生成位置和类别,而one-stage直接从图片生成位置和类别。今天提到的 YOLO就是一种
one-stage方法。YOLO是You Only Look Once的缩写,意思是神经网络只需要看一次图片,就能输出结果。YOLO
一共发布了五个版本,其中 YOLOv1 奠定了整个系列的基础,后面的系列就是在第一版基础上的改进,为的是提升性能。
YOLOv5有4个版本性能如图所示:

网络架构图

YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
输入端
在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
Mosaic数据增强
:Mosaic数据增强的作者也是来自YOLOv5团队的成员,通过随机缩放、随机裁剪、随机排布的方式进行拼接,对小目标的检测效果很不错

基准网络
融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
Neck网络
在目标检测领域,为了更好的提取融合特征,通常在Backbone和输出层,会插入一些层,这个部分称为Neck。Yolov5中添加了FPN+PAN结构,相当于目标检测网络的颈部,也是非常关键的。


FPN+PAN的结构

这样结合操作,FPN层自顶向下传达强语义特征(High-Level特征),而特征金字塔则自底向上传达强定位特征(Low-
Level特征),两两联手,从不同的主干层对不同的检测层进行特征聚合。
FPN+PAN借鉴的是18年CVPR的PANet,当时主要应用于图像分割领域,但Alexey将其拆分应用到Yolov4中,进一步提高特征提取的能力。
Head输出层
输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
对于Head部分,可以看到三个紫色箭头处的特征图是40×40、20×20、10×10。以及最后Prediction中用于预测的3个特征图:
①==>40×40×255②==>20×20×255③==>10×10×255

-
相关代码
class Detect(nn.Module):stride = None # strides computed during buildonnx_dynamic = False # ONNX export parameterdef __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layersuper().__init__()self.nc = nc # number of classesself.no = nc + 5 # number of outputs per anchorself.nl = len(anchors) # number of detection layersself.na = len(anchors[0]) // 2 # number of anchorsself.grid = [torch.zeros(1)] * self.nl # init gridself.anchor_grid = [torch.zeros(1)] * self.nl # init anchor gridself.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output convself.inplace = inplace # use in-place ops (e.g. slice assignment)def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convbs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()if not self.training: # inferenceif self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xyy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whelse: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xywh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # why = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0):d = self.anchors[i].deviceif check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)], indexing='ij')else:yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()anchor_grid = (self.anchors[i].clone() * self.stride[i]) \.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()return grid, anchor_grid
4 数据处理和训练
4.1 安全帽检测
这里只是判断 【人没有带安全帽】、【人有带安全帽】、【人体】 3个类别 ,基于 data/coco128.yaml 文件,创建自己的数据集配置文件
custom_data.yaml。
创建自己的数据集配置文件
# 训练集和验证集的 labels 和 image 文件的位置
train: ./score/images/train
val: ./score/images/val
# number of classesnc: 3# class namesnames: ['person', 'head', 'helmet']创建每个图片对应的标签文件
使用 data/gen_data/gen_head_helmet.py 来将 VOC 的数据集转换成 YOLOv5 训练需要用到的格式。
使用标注工具类似于 Labelbox 、CVAT 、精灵标注助手 标注之后,需要生成每个图片对应的 .txt 文件,其规范如下:
- 每一行都是一个目标
- 类别序号是零索引开始的(从0开始)
- 每一行的坐标 class x_center y_center width height 格式
- 框坐标必须采用归一化的 xywh格式(从0到1)。如果您的框以像素为单位,则将x_center和width除以图像宽度,将y_center和height除以图像高度。
代码如下:
import numpy as np
def convert(size, box):
"""
将标注的 xml 文件生成的【左上角x,左上角y,右下角x,右下角y】标注转换为yolov5训练的坐标
:param size: 图片的尺寸: [w,h]
:param box: anchor box 的坐标 [左上角x,左上角y,右下角x,右下角y,]
:return: 转换后的 [x,y,w,h]
"""
x1 = int(box[0])y1 = int(box[1])x2 = int(box[2])y2 = int(box[3])dw = np.float32(1. / int(size[0]))dh = np.float32(1. / int(size[1]))w = x2 - x1h = y2 - y1x = x1 + (w / 2)y = y1 + (h / 2)x = x * dww = w * dwy = y * dhh = h * dhreturn [x, y, w, h]生成的 .txt 例子:
1 0.1830000086920336 0.1396396430209279 0.13400000636465847 0.15915916301310062
1 0.5240000248886645 0.29129129834473133 0.0800000037997961 0.16816817224025726
1 0.6060000287834555 0.29579580295830965 0.08400000398978591 0.1771771814674139
1 0.6760000321082771 0.25375375989824533 0.10000000474974513 0.21321321837604046
0 0.39300001866649836 0.2552552614361048 0.17800000845454633 0.2822822891175747
0 0.7200000341981649 0.5570570705458522 0.25200001196935773 0.4294294398277998
0 0.7720000366680324 0.2567567629739642 0.1520000072196126 0.23123123683035374
选择模型
在文件夹 ./models 下选择一个你需要的模型然后复制一份出来,将文件开头的 nc = 修改为数据集的分类数,下面是借鉴
./models/yolov5s.yaml来修改的
# parameters
nc: 3 # number of classes <============ 修改这里为数据集的分类数
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchorsanchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 backbonebackbone:# [from, number, module, args][[-1, 1, Focus, [64, 3]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, BottleneckCSP, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 9, BottleneckCSP, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, BottleneckCSP, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 1, SPP, [1024, [5, 9, 13]]],[-1, 3, BottleneckCSP, [1024, False]], # 9]# YOLOv5 headhead:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, BottleneckCSP, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, BottleneckCSP, [256, False]], # 17[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, BottleneckCSP, [512, False]], # 20[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, BottleneckCSP, [1024, False]], # 23[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
开始训练
这里选择了 yolov5s 模型进行训练,权重也是基于 yolov5s.pt 来训练
python train.py --img 640 \--batch 16 --epochs 10 --data ./data/custom_data.yaml \--cfg ./models/custom_yolov5.yaml --weights ./weights/yolov5s.pt
4.2 检测危险区域内是否有人
危险区域标注方式
使用的是 精灵标注助手 标注,生成了对应图片的 json 文件
执行侦测
python area_detect.py --source ./area_dangerous --weights ./weights/helmet_head_person_s.pt
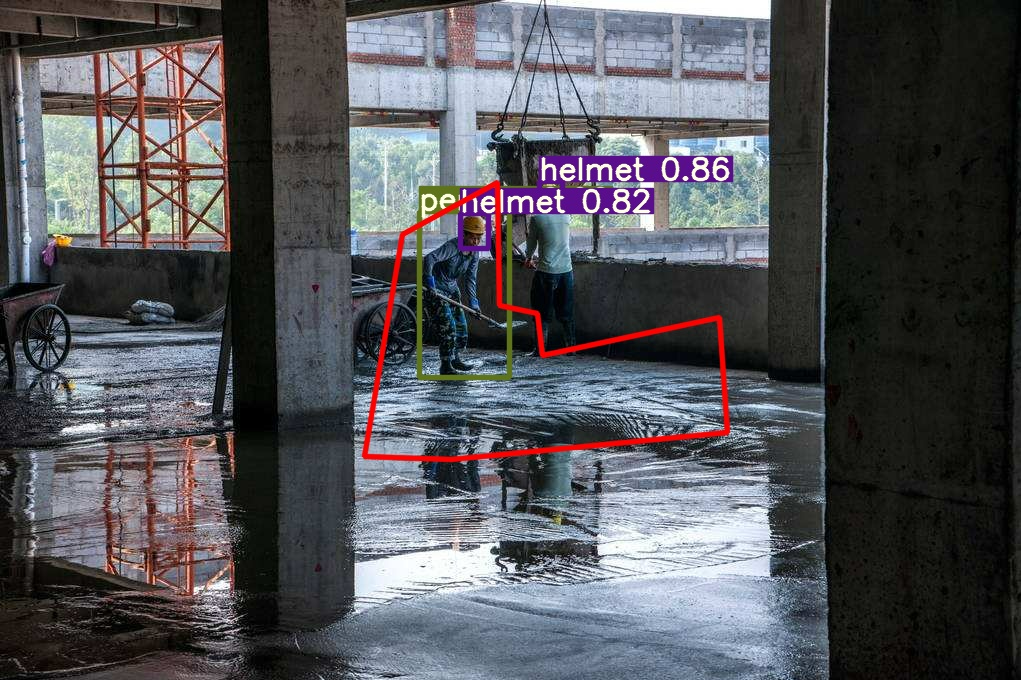
效果
危险区域会使用 红色框 标出来,同时,危险区域里面的人体也会被框出来,危险区域外的人体不会被框选出来。
5 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate