金智维KRPA问题集锦
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/323039.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
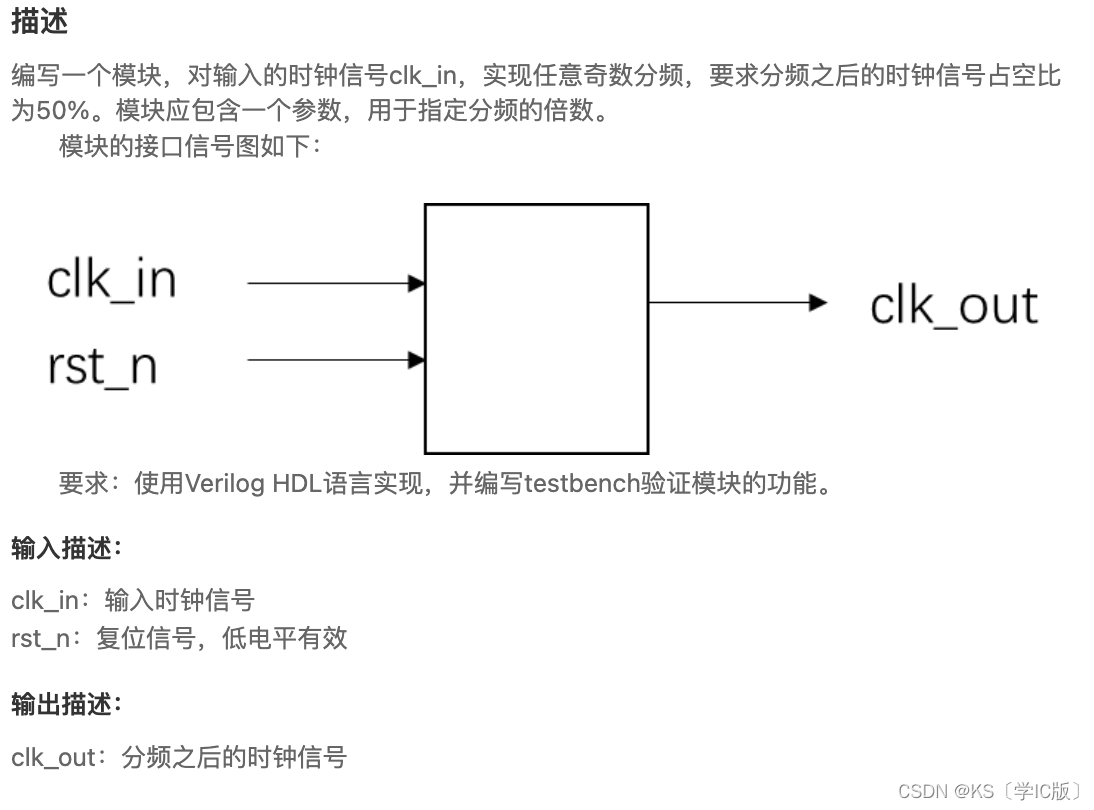
「Verilog学习笔记」任意奇数倍时钟分频
专栏前言 本专栏的内容主要是记录本人学习Verilog过程中的一些知识点,刷题网站用的是牛客网 timescale 1ns/1nsmodule clk_divider#(parameter dividor 5)
( input clk_in,input rst_n,output clk_out
);parameter CNT_WIDTH $clog2(dividor - 1) ; reg flag1, f…

2023年度全球重大关基安全事件 TOP 10 | FreeBuf 年度盘点
2023年,针对关键信息基础设施的网络攻击已经演变成为了一个全球性的问题,无论是中、美、俄等国际大国,还是诸多小国/地区,无论是经济发达还是落后,都无法保证绝对免疫关键基础设施的攻击。为了保障国家安全和社会稳定&…
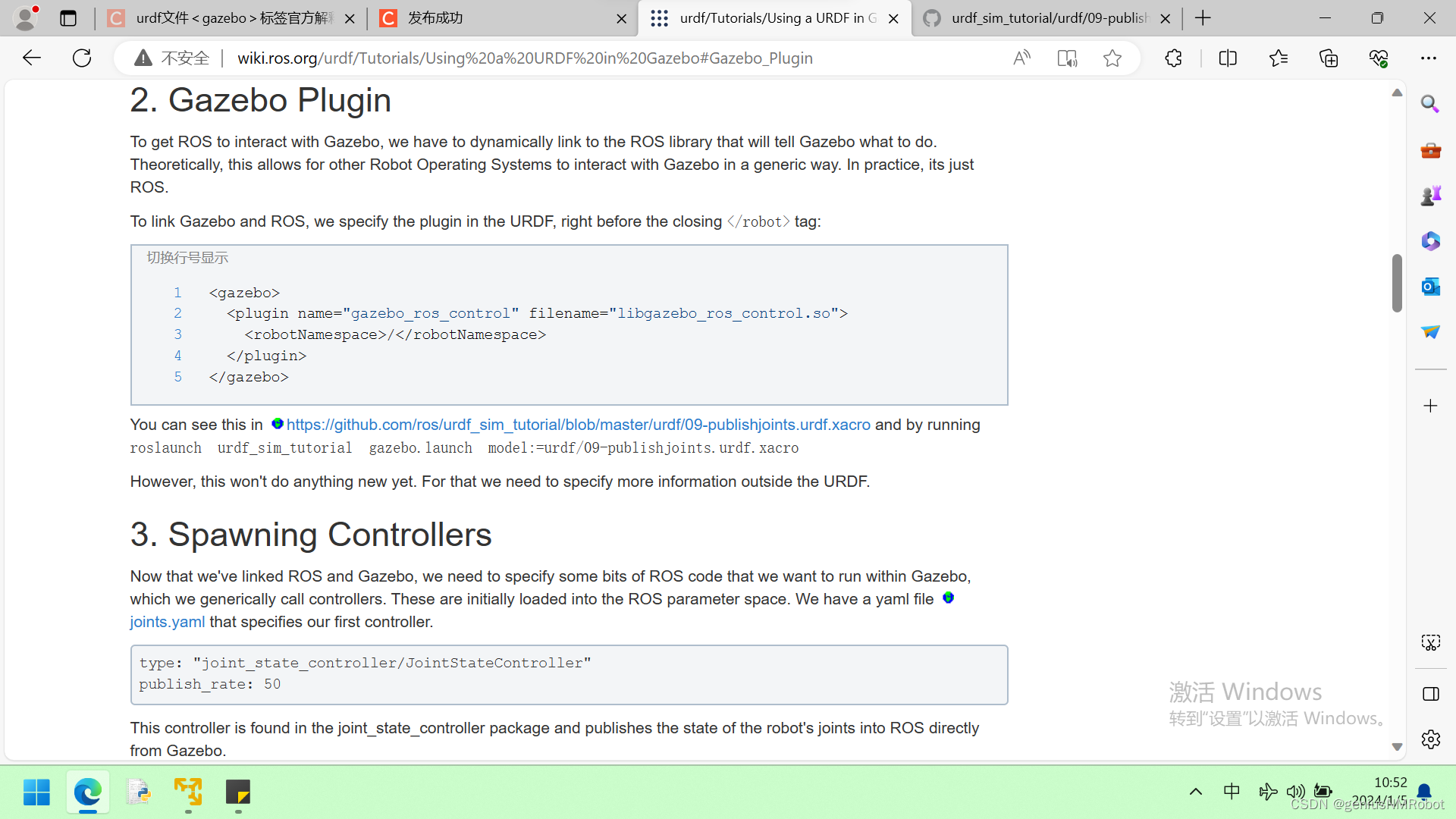
urdf文件<gazebo>内<plugin>标签作用(虚拟驱动)
To get ROS to interact with Gazebo, we have to dynamically link to the ROS library that will tell Gazebo what to do. Theoretically, this allows for other Robot Operating Systems to interact with Gazebo in a generic way. In practice, its just ROS.
如果要使…
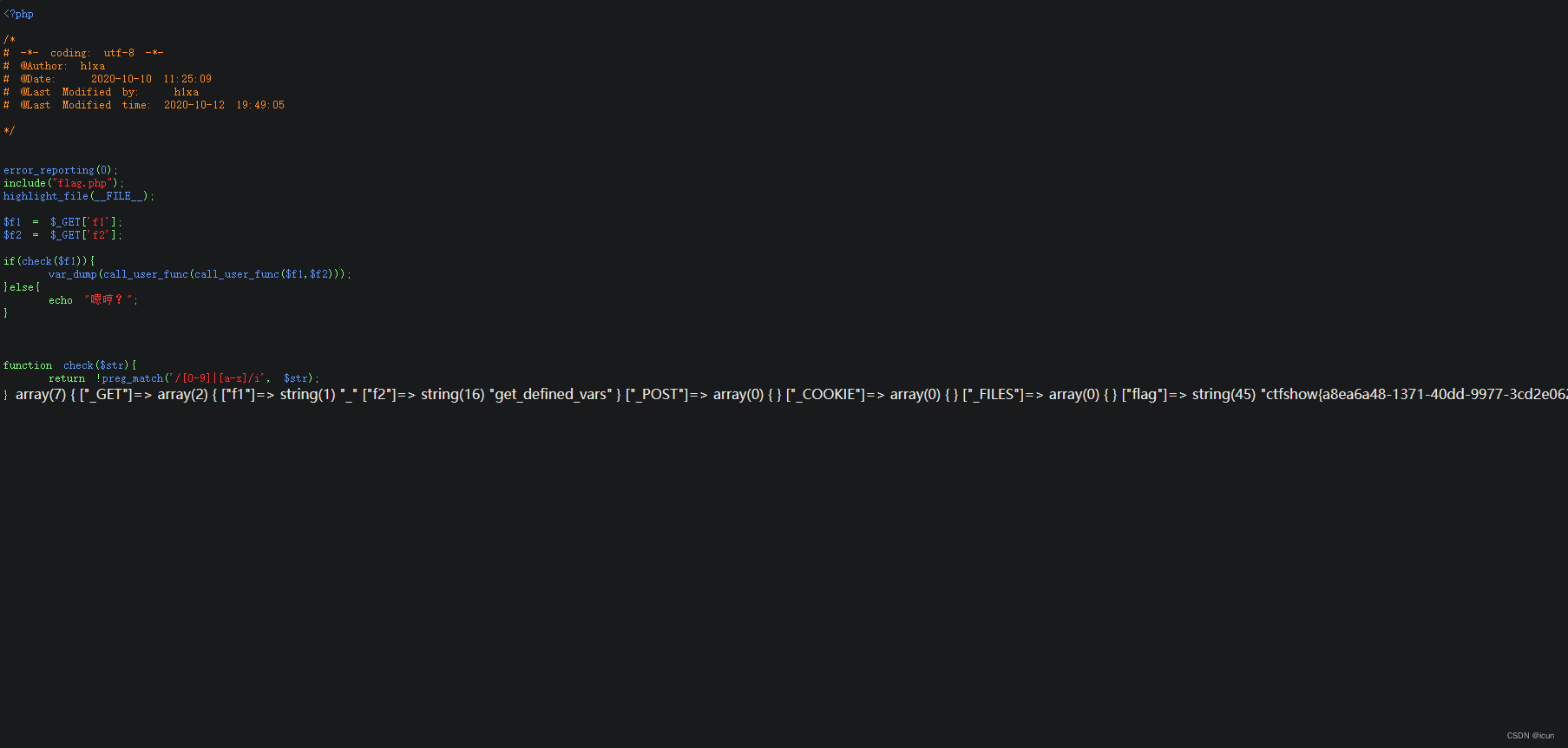
CTFshow web入门web128-php特性31
开启环境: 一个新的姿势,当php扩展目录下有php_gettext.dll时:
_()是一个函数。
_()gettext() 是gettext()的拓展函数,开启text扩展get_defined_vars — 返回由所有已定义变量所组成的数组。
call_user_func — 把第一个参数作为回调函数调…

我不想学JAVA---------JAVA和C的区别
前言
我一个研究方向是SLAM的为什么要来学JAVA。 从九月份开学到现在,已经学了Linux,数据结构,SLAM,C的基础操作,期间还参与编写了一本VHDL的教材。还有上课、考试什么的其他杂七杂八的事情就不说了。 读研好苦逼&…
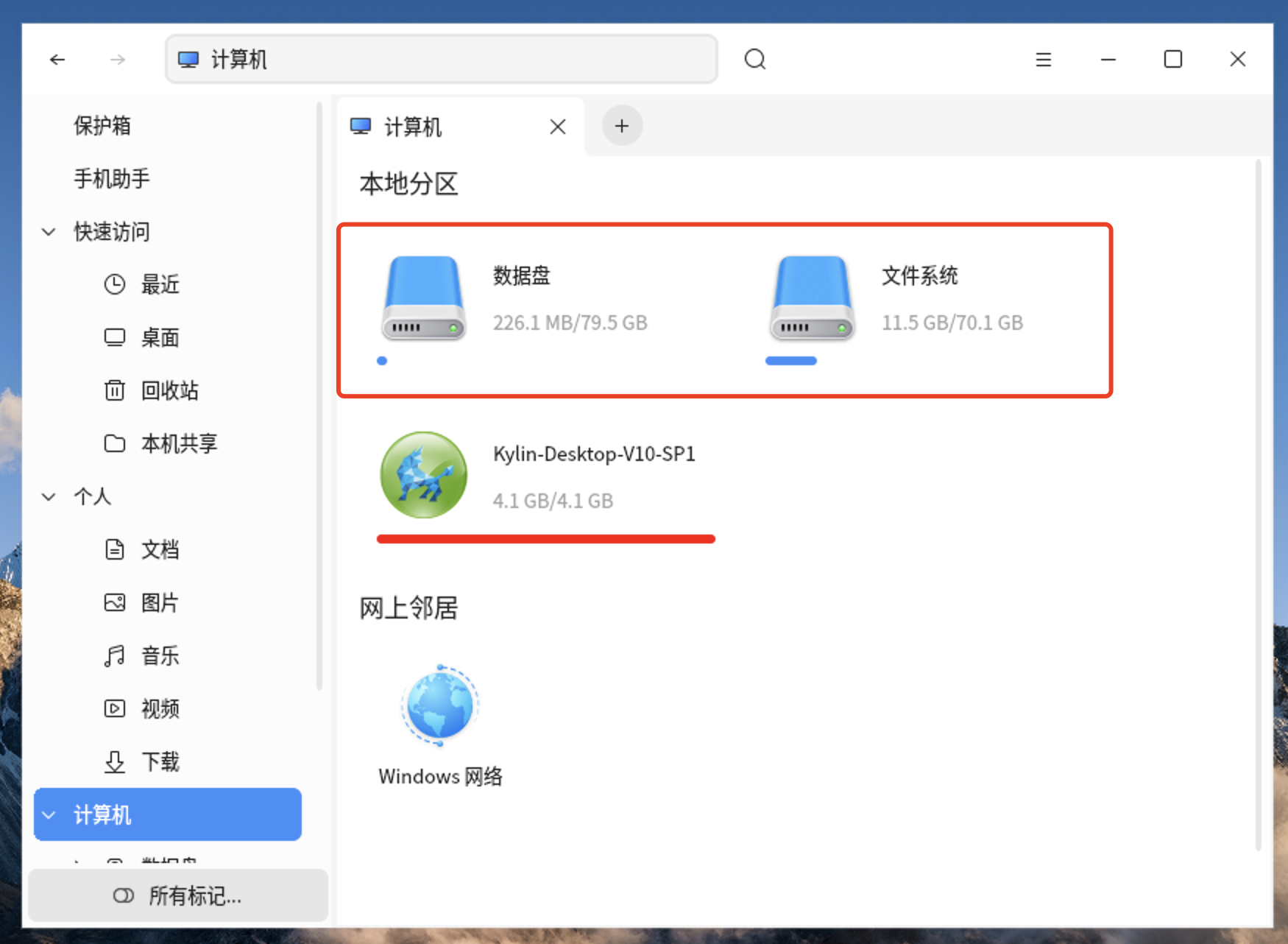
麒麟KYLINOS操作系统上扩容系统盘
原文链接:麒麟KYLINOS操作系统上扩容系统盘 hello,大家好啊!继之前我们讨论了如何在统信UOS上扩容数据盘之后,今天我要给大家带来的是在麒麟KYLINOS操作系统上扩容系统盘与数据盘的方法。随着数据的不断增长,系统盘或数…

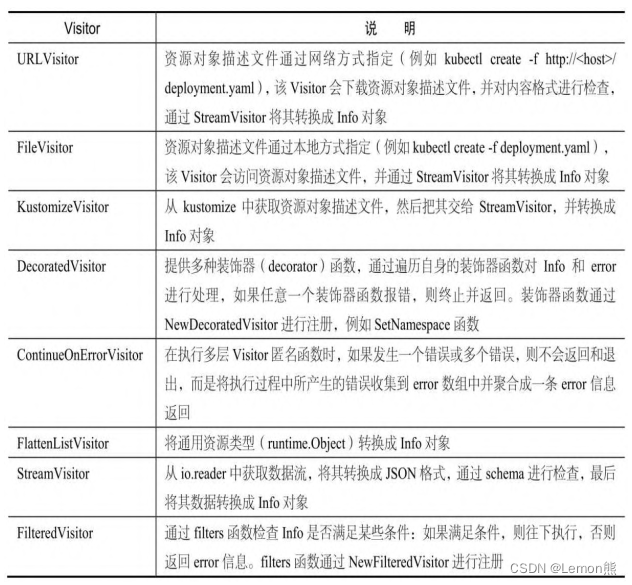
kubectl命令行交互
Cobra库
k8s各组件的cli部分都使用Cobra库实现,Cobra 中文文档 - 掘金 (juejin.cn),获取方式如下:
go get -u github.com/spf13/cobralatest
cobra库中的Command结构体的字段,用于定义命令行工具的行为和选项。它们的作用如下&…

C语言KR圣经笔记 5.7多维数组 5.8指针数组初始化 5.9指针vs多维数组
5.7 多维数组
C 提供了矩形的多维数组,虽然实际上它们用得比指针数组少得多。本节我们将展示多维数组的一些特性。
考虑下日期转换的问题:把某月的第几天转换为当年的第几天,以及反向转换。例如,3月1日是非闰年的第60天…
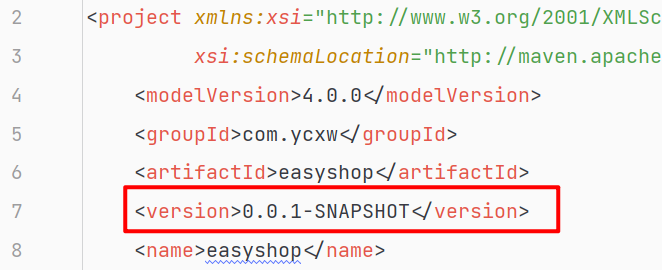
Spring Cloud Alibaba 介绍与版本映射关系
目录
前言
一、Spring Cloud Alibaba 是什么?
二、Spring Cloud Alibaba 版本依赖 前言 Spring Cloud 本身并不是一个拿来即可用的框架,它是一套微服务规范,这套规范共有两代实现。
(子项目):
● 第一代实现: Spr…
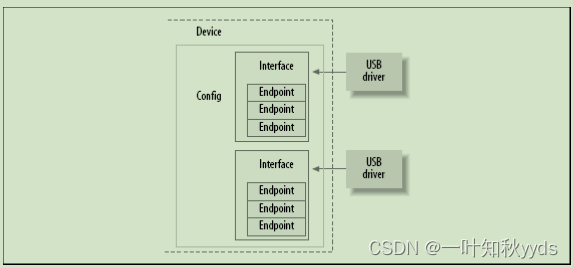
linux usb 驱动介绍
通用串行总线(USB)是一个在主机和许多外设之间的连接. 最初它被创建来替代许多慢速和不同的总线- 并口, 串口, 和键盘连接--有一个单个的所有设备都可以连接的总线类型. [45] USB 已经成长超出了这些 慢速连接并且现在支持几乎每种可以连接到 PC 的设备. USB 规范的最新版本增加…