文章目录
- 3D数学基础
- 矢量/向量
- 什么是向量
- 点与矢量的关系
- 向量基础运算 向量加法
- 向量基础运算 数乘
- 线性组合 - 坐标系的基
- 如果选择不同的基向量会怎么样?- 张成(Span)的空间
- 三维向量的张成空间
- 线性相关与线性相关
- 矩阵与线性变换
- 矩阵-几何意义线性变换
- 矩阵乘法与线性变换复合
3D数学基础
学习视频:线性代数的本质 强烈推荐!!
矢量/向量
在笔记中
- 变量使用小写字母表示,a
- 由于笔记中画上箭头表示向量比较麻烦,这里小写字母加粗显示,a
- 矩阵变量使用粗体大写字母表示,A
线性代数围绕向量加法+向量数乘两种基本运算。行矩阵和列矩阵都可以描述向量,在本笔记中,没有特殊说明都是采用行矩阵。
什么是向量
在线性代数中,
Vector被称为向量,在几何中,Vector被称为矢量,文中向量矢量都在使用。数字 = 标量,通常用于缩放向量。
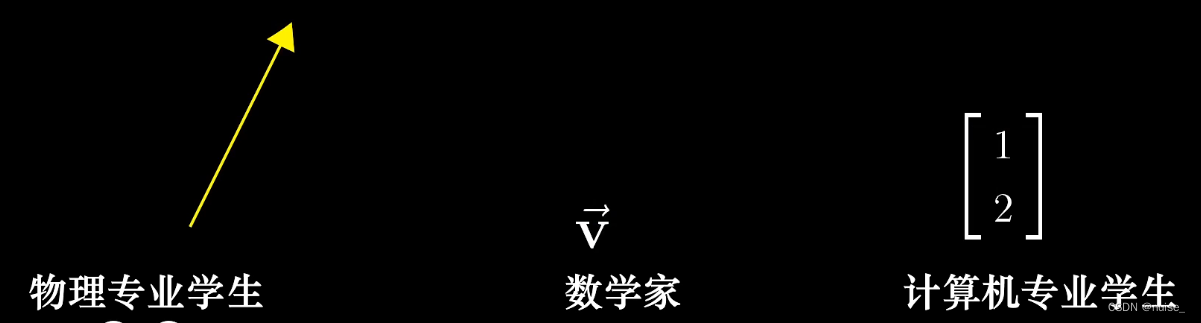
向量是空间中的箭头,在线代中,向量经常以原点作为起点。向量的数组表示法[x,y]表示从原点出发(向量起点)如何到达向量终点。
矢量意义
矢量是具有大小和方向的有向线段。
- 矢量的大小:矢量的长度,非负值。
- 矢量的方向:描述矢量在空间中指向的方向。
图形上每个矢量是位置无关的,比如使用笛卡尔坐标描述矢量时,每个坐标相当于描述对应维度(x、y或其他)中有符号位移。
比如三维矢量[3,-1,2]可以表示为①向+x轴平移3个单位②向+y轴平移-1个单位(或者-y轴平移1个单位)③向+z轴平移2个单位。其实顺序不重要,移动的总量是一样的。
矢量可以理解为某种运动方式(二维中沿x轴怎么运动,沿y轴怎么运动)
零矢量:矢量中唯一没有方向的,可以理解为无位移(而不是一个点因为矢量不描述一点)
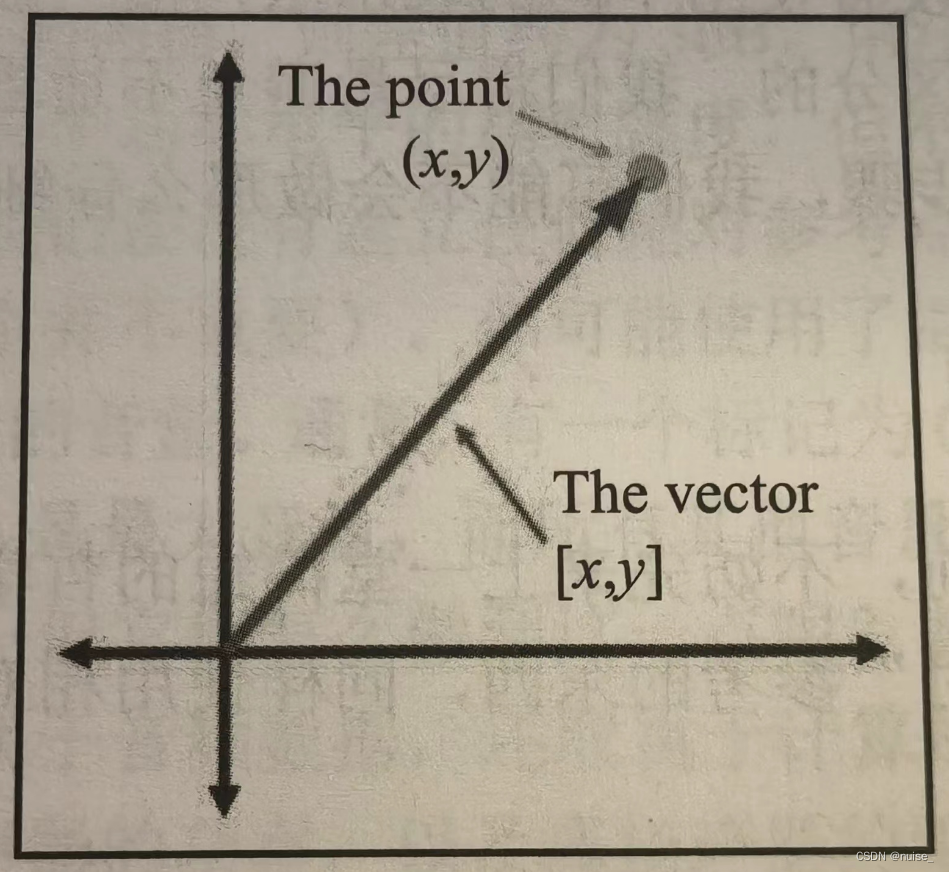
点与矢量的关系
假设有点(x,y)与矢量[x,y]
如果从原点开始按照矢量[x,y]指定的量移动,最终将到达点(x,y)的位置。或者说矢量[x,y]给出了原点到点(x,y)的位移。
向量基础运算 向量加法
比如v+w,三角形法则几何理解为从一个点开始应用由c指定的位移,然后再应用由w指定的位移,与直接应用v+w指定的位移效果一致。
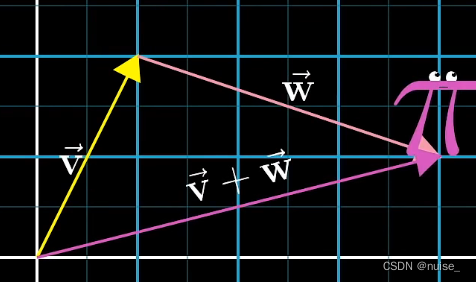
比如在一维轴上,先向右走2步再向右走5步的效果等于直接从原点向右走7步。
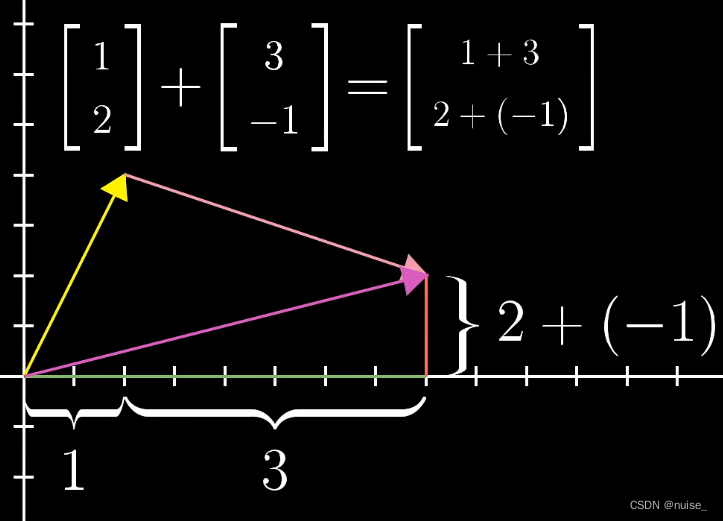
假设v=[1,2]、w=[3,-1],v+w表示先沿x轴移动1+3个位移,再沿y轴移动2+(-1)个位移
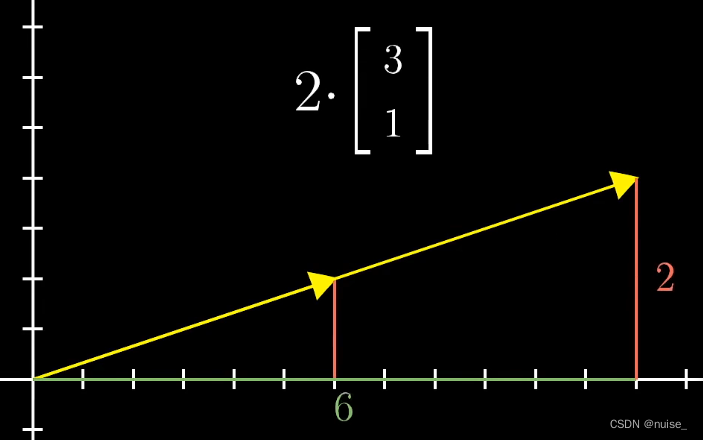
向量基础运算 数乘
运算式:k[x,y,z] = [x,y,z]k = [kx,ky,kz]
数字 = 标量,通常用于缩放向量。
kv表示向量沿指定方向缩放k倍,从数字的角度看,对应于将每一个分量分别*k。
向量与标量相乘就是将向量中的每个分类与标量相乘。
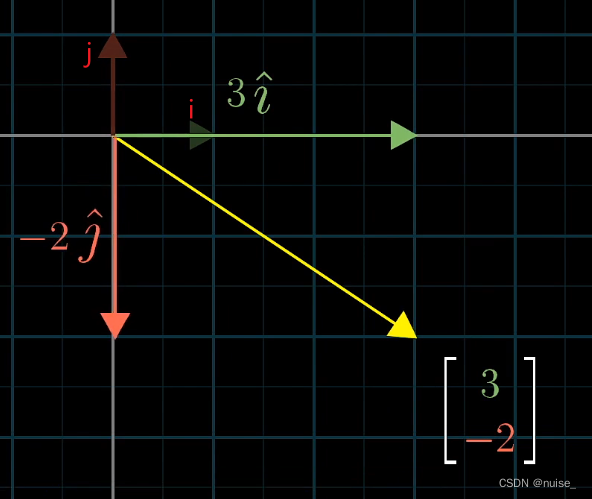
线性组合 - 坐标系的基
假设 i和j是坐标系的基向量
其中
x方向的单位向量i:长度为1,指向+x方向
y方向的单位向量j:长度为1,指向+y方向
并不是说基向量一定是单位向量,空间的一组基严格定义:向量空间的一组基是张成该空间的一个线性无关向量集合
利用坐标系的基,我们可以从另一个角度描述向量。向量可以表示为缩放坐标系的基向量并相加,向量=两个经过缩放的向量和。
将向量v=[3,-2]的分量想象成标量,3表示拉伸i为原来的3倍,-2表示反向拉伸j为原来的两倍。所以向量v = 3i+(-2)j。
如果选择不同的基向量会怎么样?- 张成(Span)的空间
任选两个基向量,使用任意两个标量缩放基向量,然后两基向量相加可以得到所有的二维向量。
当用数字(坐标)描述向量时,都依赖于我们正在使用的基。
比如描述物体的运动时,要依赖参考系。所以用数字描述向量时,要看是在哪个基向量下。
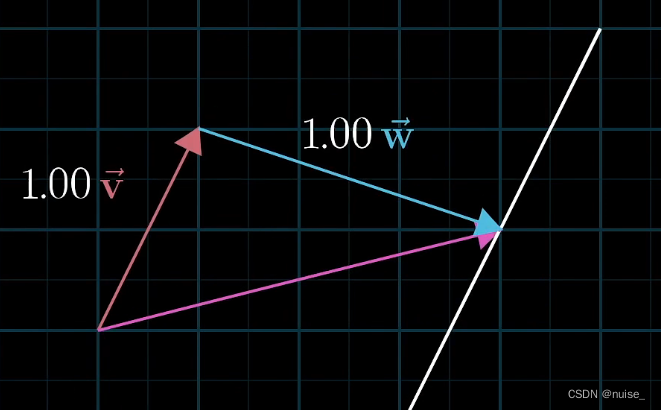
两个数乘向量的和被称为这两个向量的线性组合
为什么叫线性?如果固定住其中一个向量,让另一个向量自由变化,那么向量的终点会描出一条直线。
- 如果同时缩放两个向量,这两个向量并不共线且都不是零向量,那么就可以得到平面中的所有位置。
- 如果两个初始向量共线,产生的向量终点被限制在一条过原点的直线上。
- 如果两个初始向量为零向量,那么产生的向量终点就是原点。
任意两个不共线的向量可以作为平面空间的基底
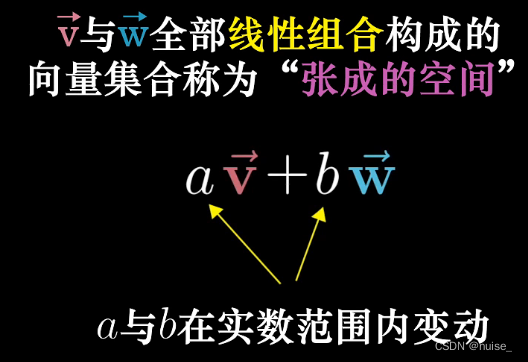
张成(Span)的空间 :v和w全部线性组合构成的向量集合
是扩张成(张开形成?)的空间吗?感觉这里的张成应该是一个动词?对大部分向量v和w来说,他们张成的空间是所有二维向量的集合,对共线的v和w来说,他们张成的空间是终点落在一条直线上的向量的集合。
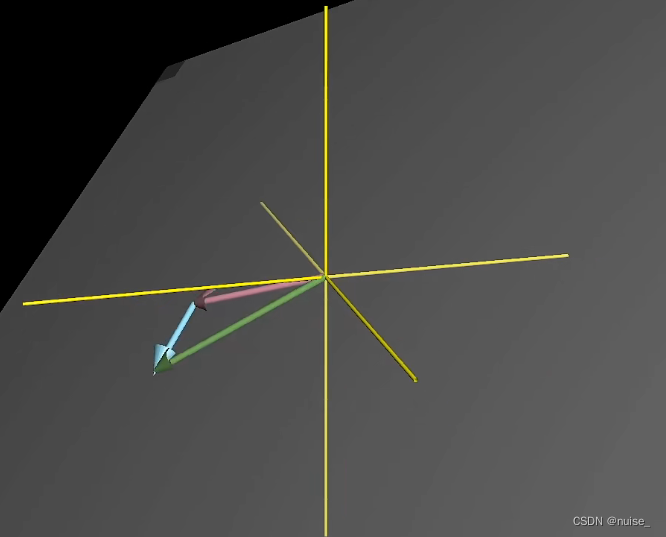
三维向量的张成空间
两个三维向量张成的空间是一个过原点的平面,所有终点落在这个平面上的向量的集合就是这两个向量张成的空间。
三个三维向量张成的空间
- 第三个向量恰好落在前两个向量所张成的平面上(第三个向量由前两个线性组合形成,可以想象成二维的共线),张成的空间不会变化还是之前的两个三维向量的张成空间。
- 如果没有落在前两个向量张成的空间上,这三个三维向量可以描述所有的三维向量(当缩放第三个向量时,前两个向量张成的平面沿着第三个向量的方向来回移动)
线性相关与线性相关
在二维空间的案例中,两个向量共线;在三维空间的案例中,第三个向量恰好落在前两个向量所张成的平面上。
从几何的角度解释线性相关
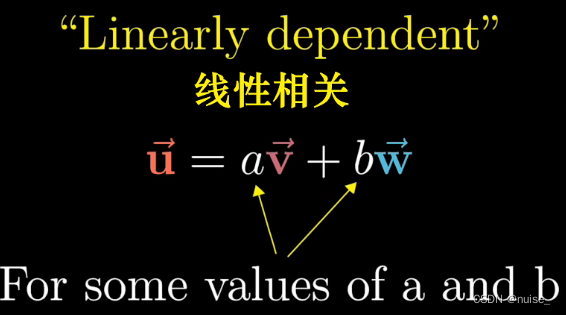
当有多个向量时,移除其中一个而步减小张成的空间,称这组向量是线性相关的。
其中一个向量可以表示为其他向量的线性组合,因为这个向量已经落在其他向量张成的空间中。
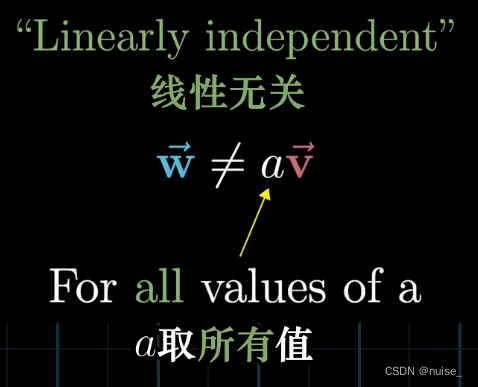
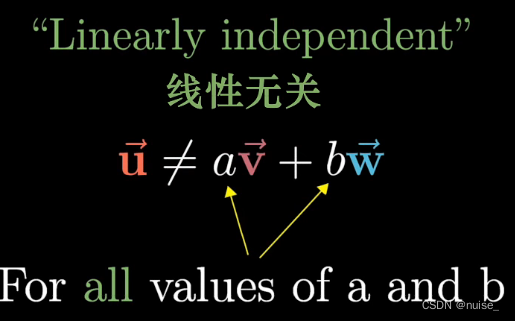
线性无关
二维中的表示就是不共线
三维中的表示就是其中一个向量不在另外两个向量张成的空间中
矩阵与线性变换
线性变换:将输入的向量映射之后输出新的向量,比如映射F(a)=b 表示映射F将a映射到b。
使用变换暗示了可以将这种映射想象成一种运动,比如旋转。
定义:当F满足线性映射时,F(a+b) = F(a)+F(b) 且 F(ka) = F(kb)
描述:将两个矢量相加然后执行变换 = 单独对两个矢量执行变换,然后将变换后的矢量加载一起。缩放一个矢量然后执行变换 = 先变换后缩放
线性变换需要同时具备的性质
1.直线在变换后仍然保持为直线,不能弯曲
2.原点保持固定

矩阵-几何意义线性变换
记录两个基向量i和j变换后的位置,就可以计算出任意向量经过变换后的位置
重要性质:线性变换保持组合系数不变
因为向量之间的关系没变(标量不变),变的只是基向量
组合系数是特征值?
矩阵只是一个记号,描述了一个线性变换的信息,或者说记录变换后的基向量
案例
假设存在v=[-1,2],v=-1i+2j,线性变换保持组合系数不变,所以转换后的v = -1转换后的i + 2转换后的j
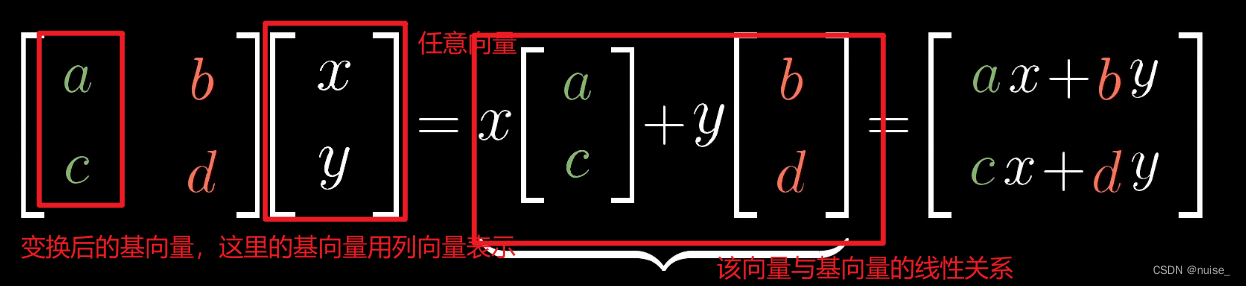
方阵的几何意义:如果知道一对基如何变换等于知道整个坐标系怎么变换了
- 方阵的行(如果基向量是列向量则是方阵的列)可以理解为坐标空间变换之后的基向量
- 将向量从原始空间变化到新坐标空间的方法是:
向量 * 矩阵,矩阵向量乘法就是计算线性变化作用于定向量的一种途径。 - 可通过可视化变化后坐标空间的基矢量来可视化矩阵。
另一个角度理解矩阵乘法的定义
矩阵乘法与线性变换复合
AB:先执行A变换然后执行B变换
如果采用列矩阵表示向量,则先执行B变换再执行A变换。
渲染案例
世界上任何位置和方向都有一个对象,假设希望给定的任意位置和方向上的相机渲染此对象。
前提:取得该对象的顶点(很多顶点)
步骤
1.模型变换,将对象的顶点从对象空间变换到世界空间中
2.视图变换,将世界空间顶点变换到相机空间
Pwld = Pobj Mobj->wld
Pcam = PwldMwld->cam
=> Pcam = Pobj(Mobj->wldMwld->cam)
=> Pcam = Pobj(Mobj->cam)
- AB 不一定等于 BA :可以将这种变换想象成函数f(g(x)),由于f(g(x)) 不一定等于g(f(x)),所以AB 不一定等于 BA。
- (AB)C = A(BC):可以将括号理解为将两次变化步骤一次性合并了,但变换的顺序还是一致的。